基于SLAM算法的无人机雷达避障系统
2017-11-29 02:27廖建新周生威山东科技大学山东泰安271000
数码设计 2017年15期
廖建新 徐 康 周生威(山东科技大学 山东 泰安 271000)
1 无人机避障系统简介
随着国内外无人机相关技术飞速发展,无人机开始被更多的人应用于日常生活中。现在小型无人机产品中具有避障功能的不多,且由于无人机操作难度较高,具有避障功能的无人机往往安全性较高,用户体验性较好。无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因操作失误而带来的各项损失,在减少炸机事故次数的同时,更能进一步推进无人机的普及。
本文结合激光雷达和SLAM算法,设计出一种新型的无人机避障系统。该系统弥补了无人机通讯飞控上的缺陷及避障策略不完善的不足,同时通过PC端地面站软件,获取无人机飞行及环境监测数据,实现了对无人机的远程监测和控制,提升了无人机自动化和智能化的水平。
2 无人机雷达避障系统
2.1 激光雷达避障。通过对开源硬件Pixhawk进行二次开发,采用Rplidar A2激光雷达进行障碍物探测,其扫描频率10Hz,可在周围6米范围内进行360度扫描,得到障碍物与无人机的距离和所成角度,完成整个障碍检测过程。
2.2 超视距控制。无人机配备无线路由,通过机载树莓派与云服务器连接,地面站软件(PC端或手机APP)也与云服务器相连。该避障系统采用地面站软件通过云服务器AZURE与无人机飞行控制器通讯的方式,依据MQTT协议进行数据传输,通过4G网络,摆脱了遥控器信号传输距离短的限制,使得地面站能够通过云服务器实时监测无人机飞行状态,并将接收到数据转化为当前无人机可视化飞行状态,从而向无人机发送指令改变无人机当前状态。
通过此通信系统进行数据传输,实现了对无人机的超视距控制。
2.3 地面站。为能实时监测无人机的飞行状态并能在超视距时对飞行姿态进行控制,基于win10系统用C#编写地面站软件,PC端地面站完美替代遥控器,操控更为精确,数据可视化分析,通过4G通讯与云服务器AZURE进行数据传输。服务器和树莓派之间也通过4G通讯实现数传。实现了超视距监测无人机飞行状态及周围环境,直观实时查看飞行姿态及飞行参数,并能向无人机飞行控制器发送姿态改变指令,实现超视距飞行。地面站软件如下图2.1所示。

3 结合SLAM算法实现路径规划
SLAM的中文名称是即时定位与地图构建,也叫做并发建图与定位。SLAM问题可以描述为:无人机在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,从而实现无人机的自主定位和导航。
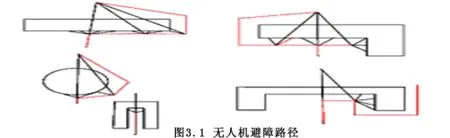
该避障系统采用结合SLAM算法自主设计的无人机遇障碍物转向贴边飞行的避障策略;在无人机遇到障碍物后执行简单悬停动作,悬停稳定后,加入完整避障算法进行测试;根据避障效果进行路径优化,符合避障策略后,与地面站软件集成,形成完整的无人机避障系统,规避不规则障碍物。其避障路径如图3.1所示。
4 结论
该无人机避障系统使用激光雷达避障技术,以雷达的可靠性、受环境影响较小的优势,较好地解决了传统避障技术如超声波避障和红外线避障技术上的不足;使用基于SLAM算法的贴边飞行的避障策略,提高了无人机在复杂情况下的飞行安全性。无人机避障具有较好的实用性和推广性,大疆的Matrix 100、英特尔的TYPHOONH、零度的XPLORER2这三款产品均采用这种无人机前方障碍物避障的避障策略,无人机避障也可应用于军事、民用、工业、农业等领域,该系统在同类产品中具有较广阔的市场和较高的实用价值,能产生较大的经济社会效益。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
动漫界·幼教365(中班)(2020年3期)2020-04-20
中国计算机报(2020年9期)2020-03-25
铁道通信信号(2020年9期)2020-02-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24