
液压凿装机动臂载荷的计算与有限元分析
2017-12-06 18:08吴卫东王斯特王晓丹
黑龙江科技大学学报 2017年6期
吴卫东, 王斯特, 王晓丹
(黑龙江科技大学 机械工程学院, 哈尔滨 150022)
液压凿装机动臂载荷的计算与有限元分析
吴卫东, 王斯特, 王晓丹
(黑龙江科技大学 机械工程学院, 哈尔滨 150022)
液压凿装机动臂在凿岩和扒岩过程中所受载荷较大,易出现损伤,为提高其结构强度和刚度,减轻其重量,分析7种典型工况下掘进臂整体结构的受力状态及动臂各铰点所受载荷。利用SolidWorks软件建立动臂三维模型,将其导入ANSYS Workbench软件,仿真分析3种危险工况下动臂的强度和刚度,采用变密度法拓扑优化动臂结构,提高其轻量化程度和结构强度。结果表明:在动臂油缸与关节油缸作用力矩为最大时,动臂侧板镂空处和前板处结构强度较薄弱,安全系数仅为1.19;优化后的动臂减重13.1%,最大应力降低31.7%。
液压凿装机; 动臂; 有限元; 强度; 拓扑优化
0 引 言
为了解决巷道掘进中难以连续性装车、掘进和运输等问题,国内外研发了多种钻装一体机械,如国外的TDR-6型钻装机和2000DL型钻装机,以及国内的CMZY2-100/18型钻装机和ZZ2-8/100型钻装机等[1-3]。但在软岩层巷道中,传统钻爆法容易发生超挖欠挖现象,目前,巷道掘进等地下工程建设中,多采用破碎锤冲击法和全断面掘进法[4-5]。液压凿装机将破碎锤与扒斗集成于同一掘进臂上,配合带式输送机实现连续凿岩、扒岩和运岩作业,极大地提高了煤岩巷道的掘进效率。动臂在凿岩作业和扒岩作业过程中承受较大的拉压、冲击和扭转载荷,因此,动臂的结构强度对液压凿装机的工作性能和可靠性有重要影响。
杨林[6]对某钻装机伸缩臂进行强度分析和模态分析,通过分析其应力状态验证其强度满足要求,并从模态分析中发现其1阶固有频率与激振频率较接近,对其进行结构改进,降低了因外界激励引起共振的概率。席汝凯等[7]对某凿岩台车大臂进行强度分析,根据分析结果指导其结构设计,工业试验可靠性测试表明,达到了设计要求。J. Andruszko等[8]对某矿用轮式装载机的动臂、扒斗进行有限元分析,确定其作业过程中载荷变化和最大应力值,并以此为依据,对其结构参数进行改进,使其强度得到提高。饶刚等[9]对某矿用装载机大臂与小臂的2种危险工况进行强度分析,并基于变密度法对大臂进行拓扑优化设计,重量减轻了34%。
笔者以某液压凿装机为研究对象,分析掘进臂在各典型工况下铰点载荷,利用ANSYS对其动臂进行静力学分析,在此基础上,基于变密度法对其进行拓扑优化。
1 动臂载荷分析
液压凿装机掘进臂主要由万向节体、动臂、关节体、铲臂、破碎锤等部件组成,通过各驱动油缸的伸缩运动完成凿岩和扒岩动作,其结构如图1所示。

图1 掘进臂结构
在掘进臂实际作业过程中,存在多种凿岩姿态和挖掘姿态,需要注意掘进臂最危险的姿态,以免因出现薄弱部位的断裂而造成的重大损失。根据《GB9141—1988液压挖掘机结构强度试验方法》和现场工作人员的反馈,分别对4种凿岩工况和3种扒岩工况进行受力分析,各工况关节变量参数如表1所示,其中θ1~θ5分别为万向节摆角、动臂俯仰角和关节俯仰角及铲臂摆角,a6为破碎锤伸缩长度。

表1 各工况关节变量参数
以凿岩工况一为例,对掘进臂整体结构进行受力分析。
凿岩反力Fv的计算公式[10]为:
(1)
式中:KR——载荷系数,一般取0.33;
f——冲击频率,Hz;
E——冲击能,J;
m——活塞质量,kg。
以掘进臂整体为研究对象,动臂、关节、破碎锤和铲臂的重力分别为G2、G4、G5、G6,为计算方便,将动臂油缸和关节油缸重力等效作用于两端铰接点处,分别为G1和G3。凿岩反力Fv、动臂油缸闭锁力P1、铰点A的x轴和z轴的分力FAx和FAx,如图2a所示,P1与x轴正方向夹角为60°。对铰点A取矩,通过力矩平衡方程求得动臂油缸闭锁力P1:
(2)
式中:L1——凿岩反力对铰点A作用力臂,mm;
rAi——各零部件重力对铰点A作用力臂,mm;
e1——动臂油缸闭锁力对铰点A作用力臂,mm。
由x轴和z轴方向受力平衡ΣFx=0和ΣFz=0可知:
P1cos 60°+FAx=0,
(3)
。
(4)
由式(3)、(4)可以得到铰点A的x轴和z轴的分力FAx和FAz。
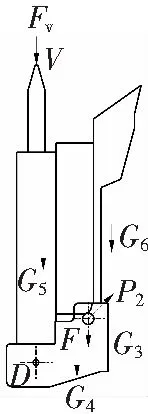
以关节、铲臂和破碎锤为研究对象,受到重力G3、G4、G5、G6,凿岩反力Fv,关节油缸闭锁力P2,P2与x轴正方向夹角为45°,铰点D的x轴和z轴的分力FDx和FDz,如图2b所示。对铰点D取矩,列出力矩平衡方程求得由关节油缸闭锁力P2:

(5)
式中:rDi——各零部件重力对铰点D作用力臂,mm;
e2——关节油缸闭锁力对铰点D作用力臂,mm。
由x轴和z轴方向受力平衡ΣFx=0和ΣFz=0可知:
P2cos 45°+FDx=0,
(6)
P2sin 45°+FDz-Fv-G3-G4-G5-G6=0。
(7)
由式(6)、(7)可以得到铰点D的x轴和z轴的分力FDx和FDz。

a
b
同理可求得其他工况下动臂各铰点的受力情况,如表2所示。

表2 各工况动臂铰点载荷
由表2可知,动臂最大仰角垂直向上凿岩(凿岩工况一)和动臂油缸与关节油缸作用力矩为最大时扒岩(扒岩工况三)时动臂受力较大;另外,在动臂为最大俯角水平凿岩(凿岩工况三)时,动臂在承受较大拉压载荷的同时受到一定的弯矩和扭矩,故本文选取这3种危险工况,分别对动臂进行有限元分析。以确定其在相应危险工况下的应力集中和刚度较薄弱部位,为动臂结构改进和优化提供理论依据。
2 动臂有限元模型
2.1三维模型
在SolidWorks中建立动臂的三维模型导入ANSYS Workbench中,忽略动臂上的焊缝、螺纹孔、管座等不影响整体受力的局部细节,可在建模时将动臂按一个整体进行建模。
2.2材料属性
动臂采用高强度钢板焊接而成,材料为Q345,销轴的材料为40Cr。其材料属性如表3。由于动臂受载情况复杂,取安全系数为1.5。

表3 动臂材料属性
2.3网格划分
网格的质量和数量的提升会提高计算精度和计算耗时。为了获得规则的有限元网格,选用Solid185三维实体单元,在ANSYS Workbench的Geometry模块中将动臂模型进行适当的切割,采用六面体单元生成网格模型。通过试算设置网格尺寸为15 mm,动臂共划分45 203个单元,185 424个节点。划分完成的网格模型如图3所示。

图3 动臂网格划分
2.4边界条件与载荷分布
为了消除各部件的刚体位移,对动臂与万向节体连接处施加固定约束。设置全局重力加速度来模拟重力载荷。根据表2对应3种工况的载荷计算结果,对动臂的铰点处施加载荷。为了能较真实地模拟销孔处的受力情况,对销孔处施加Bearing Load[11-12],其径向分量根据投影面积来分布压力和载荷,如图4所示。
载荷分布函数为:

(8)
式中:F——铰点处受力,N;
α——销孔圆柱面上的点与圆心的连线和铰点受力方向的夹角,rad;
l——销孔长度,mm;
r——销孔半径,mm。

图4 Bearing Load径向载荷分布
3 动臂有限元
3.1动臂强度
各工况下动臂的应力云图如图5所示。从图5可看出,这三种工况中,动臂与动臂油缸连接轴和动臂侧板镂空处应力集中较为明显,动臂上支板所受应力均较小。
凿岩工况一最大应力位于动臂与动臂油缸连接轴上,其值为224.85 MPa,远小于40Cr的屈服极限。凿岩工况三最大应力位于动臂前侧板与前顶板焊接处,其值为200.80 MPa,这是由于动臂在此工况中受到弯矩和扭矩的影响。扒岩工况三时,最大应力分布在动臂侧板镂空处,其值为290.24 MPa,安全系数仅为1.19,动臂结构强度不能满足使用要求。

a 凿岩工况一

b 凿岩工况三

c 扒岩工况三
3.2动臂刚度
三种危险工况下动臂的位移云图如图6所示。凿岩工况一和工况三的最大变形量分别为1.35、2.31 mm分别位于动臂与关节俯仰油缸铰接处、动臂前板末端。扒岩工况三的最大变形量为2.65 mm,位于动臂前板末端。这三种工况下,最大变形量均在允许的弹性变形范围内。

a 凿岩工况一

b 凿岩工况三

c 扒岩工况三
Fig.6Displacementdistributionofboominthreeconditions
3.3动臂结构优化
根据动臂结构强度和刚度分析结果可知,动臂侧板镂空处受关节油缸作用力矩影响,产生较大的应力集中,但动臂大部分区域应力远远小于其许用应力,造成较大的材料浪费,通过将侧板镂空处下边界增厚30 mm。以消除应力集中后,对动臂进行拓扑优化,使其应力分布更加合理,提高材料利用率。
文中采用变密度拓扑优化法[13],将材料相对密度作为设计变量,反复迭代确定材料相对密度,使结构优化问题转化为材料最优分布问题,其优化数学模型:
Findx=(x1,x2,…,xn)T
Minc(x)=FTU,
(9)
s.t.V≤fV0,
F=KU,
0≤xmin≤xi≤1,
式中:xi——材料相对密度;
F——外力向量;
U——结构位移向量;
V——结构优化后体积;
f——体积约束参数;
V0——结构初始体积;
K——总刚度矩阵。
将扒岩工况三作为拓扑优化工况,优化目标定义为动臂体积最小,单位密度阈值设为0.6,得到动臂拓扑优化云图如图7所示。由图7可知,动臂上顶板和侧板部分区域对整体结构强度和刚度影响较小,可以移除,考虑到加工难度和成本,得到优化后的动臂模型如图8a所示,动臂减重13.1%。优化后动臂在扒岩工况三时的应力分布云图如图8b所示。

图7 动臂拓扑优化云图

a

b
由图8可知,拓扑优化后的动臂在扒岩工况三时应力分布更加均匀合理,最大应力为198.10 MPa,较优化前降低31.7%。对另2种危险工况下优化后动臂进行强度分析,动臂安全系数分别为2.46和2.44,因此,优化后动臂结构比较合理。
4 结 论
(1)建立液压凿装机凿岩和扒岩状态掘进臂整体结构的力学模型,通过联立求解动臂与万向节、关节铰点处的力和力矩平衡方程,得到了7种不同典型工况动臂结构载荷,经分析并确定了动臂最大仰角垂直向上凿岩、动臂最大俯角水平凿岩和动臂油缸与关节油缸作用力矩为最大时扒岩等3种危险工况。
(2)对3种危险工况,利用ANSYS Workbench分别对动臂刚度强度进行有限元分析。当动臂油缸与关节油缸作用力矩为最大,即动臂俯角为13°、关节俯角为95°时扒岩工况,最大变形量仅为2.65 mm,满足刚度要求;但动臂侧板结构强度安全系数仅为1.19,不能满足工作要求。
(3)将侧板镂空处下边界增厚30 mm以消除应力集中,基于变密度拓扑优化法对动臂进行结构优化,动臂重量降低13.1%。对优化后动臂进行强度校核,3种危险工况的动臂安全系数分别为2.46、2.44和1.74,满足工作要求,验证了此优化方案的可行性。
[1] 郭孝先, 李耀武. 新时期煤矿岩巷掘进机械化的发展方向[J]. 凿岩机械气动工具, 2013(1): 13-24.
[2] 邹海波, 刘 锋, 郭 贇, 等. 煤矿岩巷用钻装机的设计[J]. 煤矿工程, 2010, 1(7): 90-91.
[3] 朱利民, 伯志革, 杨 林. 中小断面岩巷ZZ2-8/100型钻装机的设计[J]. 煤炭科学技术, 2011, 39(10): 80-82.
[4] Aksoy C O. Proposed chart for the selection of mpact hammer[J]. International Journal of Rock Mechanics & Mining Sciences, 2014, 68(1):120-127.
[5] Ocak I, Bilgin N. Comparative studies on the performance of a roadheader, impact hammer and drilling and blasting method in the excavation of metro station tunnels in Istanbul[J]. Tunnelling & Underground Space Technology, 2010, 25(2): 181-187.
[6] 杨 林. 基于ANSYS的钻装机伸缩臂有限元分析[J]. 煤矿机械, 2013, 34(9): 126-128.
[7] 席汝凯, 李东明, 张永玺, 等. 基于Solidworks的大臂组合体有限元分析[J]. 矿业研究与开发, 2016, 36(8): 78-80.
[8] Andruszko J, Rusiński E. Analysis of state of stress in the loading assembly of one-bucket wheel loader operated in copper mine[C]// International Conference on Renewable Energy Sources-Research and Business, Cham: Springer, 2016: 19-27.
[9] 饶 刚, 张 磊, 董逸君, 等. 矿用装载机工作装置有限元分析及结构优化[J]. 制造业自动化, 2015, 37(1): 99-102.
[10] 周孝华. 液压挖掘机改凿岩机及其凿岩效率研究[D]. 长沙: 湘潭大学, 2014.
[11] 刘春生, 袁 昊, 李德根, 等. 载荷谱细观特征量与截割性能评价的熵模型[J]. 煤炭学报, 2017, 42(9): 2468-2474.
[12] 龚 敏. 基于参数化建模的反铲液压挖掘机工作装置铲斗斗形优化设计[D]. 重庆: 重庆大学, 2015.
[13] 吴顶峰. 基于变密度法的连续体结构拓扑优化研究[D]. 西安: 西安电子科技大学, 2010.
(编校李德根)
Loadcalculationandfiniteelementanalysisofboomonhydraulicdrillandloaderjumbo
WuWeidong,WangSite,WangXiaodan
(School of Mechanical Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China)
This paper is concerned with the hydraulic drill and loader jumbo vulnerable to damage due to a greater load in the course of drilling and excavating. The study designed for improving its strength and stiffness and reducing its weight involves calculating the hinge point load of seven kinds of typical conditions by the force state analysis of the driving arm structure; developing the 3D model of boom by SolidWorks; performing strength analysis and stiffness analysis of three kinds of extreme conditions by ANSYS Workbench; and using topology optimization based on variable density method to improve the lightness and strength of boom structure. The results show that the largest torque with which the boom cylinder and the joint cylinder are operated results in the side plate hollow and the front plate of boom to be weaker parts of the structure, with the safety factor of only 1.19; and optimization gives the boom a 13.1% reduction in weight and a 31.7% reduction in the maximum equivalent stress.
hydraulic drill and loader jumbo; boom; finite element; strength; modal analysis
10.3969/j.issn.2095-7262.2017.06.021
TD421.4
2095-7262(2017)06-0679-06
A
2017-05-30
哈尔滨市科技创新人才研究专项资金项目(2017RAXXJ017)。
吴卫东(1967-),男,江苏省沛县人,教授,硕士,研究方向:矿山机械设计及理论,E-mail:wu-weidong@163.com。
猜你喜欢
起重运输机械(2022年19期)2022-11-05
机械管理开发(2022年7期)2022-08-08
探索科学(学术版)(2020年9期)2021-01-20
装备维修技术(2020年3期)2020-11-20
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
建筑机械(2018年11期)2018-11-22
机械制造(2018年3期)2018-07-25
凿岩机械气动工具(2014年4期)2014-03-01
凿岩机械气动工具(2014年4期)2014-03-01
