
2ZBX-4型吊杯式蔬菜移栽机的研究与设计
2017-12-16 08:01吴彦强王文莉侯加林
农机化研究 2017年8期
吴彦强,王文莉,侯加林
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018; 2.山东省农机机械安全监理站,济南 250013)
2ZBX-4型吊杯式蔬菜移栽机的研究与设计
吴彦强1,王文莉2,侯加林1
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018; 2.山东省农机机械安全监理站,济南 250013)
针对我国当前蔬菜移栽机存在的栽植质量差的问题,设计了2ZBX-4型吊杯式蔬菜移栽机,阐述了该机工作原理并分析了工作过程。使用时由拖拉机牵引,人工投苗,可实现半自动化移栽,通过更换从动链轮可对株距进行调节。对2ZBX-4型吊杯式蔬菜移栽机进行了田间试验,结果表明:栽植株距和移栽深度稳定,可以进行多种蔬菜的移栽,损伤率、漏栽率低,直立度好,工作效率高,能满足不同地区、不同蔬菜的移栽农艺要求。
蔬菜移栽机;吊杯式;穴盘苗;牵引式
0 引言
我国是世界上最大的蔬菜生产国和消费国,蔬菜产量占世界总产量的60%左右[1-2]。蔬菜在我国种植业结构中的地位也逐年上升,其播种面积(不含瓜类)由1978 年的333.10万hm2增长到2013 年的2 089.94 万hm2,占农作物播种总面积的12.7%,仅次于水稻、小麦、玉米等大宗粮食作物,产量也于2013 年达到7.35 亿t[3-4]。然而,蔬菜产业是一项劳动密集型产业,蔬菜栽植与收获成本占蔬菜生产总成本的2/3以上。因为育苗移栽技术不但具有对气候的补偿作用和使蔬菜生育期提早的综合效应,还能提高单产[5],所以当前国内蔬菜栽植多采用育苗移栽作业方式,主要有传统人工栽植方式与机械化移栽方式。传统人工栽植方式移栽效率低,劳动强度大,移栽株距不均匀,移栽深浅度不一,造成移栽质量差、成活率低。应用蔬菜移栽机械化技术可减轻蔬菜移栽作业劳动强度,提高移栽作业质量和效率,具有省劳动力、省工时、高效率、低成本的优点。为减轻劳动强度、降低生产成本、提高生产效率和作业质量,实现蔬菜栽植机械化已成为我国农业生产的迫切需要和蔬菜产业发展的必然趋势[6-7]。
欧美等国家对移栽机的研究起步较早,设计出种类多样的半自动移栽机与全自动移栽机。按动力来源方式分为电机驱动、纯机械驱动及机、电、液、气混合的方式;按栽植器形式不同分为钳夹式、导苗管式、吊篮式及带夹圆盘式;也有针对不同面积应用的单行及多行宽幅作业机型,如穴盘苗移栽机、压缩基质苗自动移栽机[5,8]。我国对移栽机的研究起步比较晚,开始于引进国外的各种型式的移栽机,不同型式的移栽机有其各自的特点。总体来说,当前我国现有移栽机的机械化与自动化水平比较低,移栽质量差、可靠性不高,亟需一种通用型蔬菜作物移栽机,要求其工作平稳、可靠,移栽后的秧苗整齐、株距稳定、直立度好、伤苗率低、工作效率高。
本文针对当前我国移栽机械存在的问题研制了2ZBX-4型吊杯式蔬菜移栽机,其栽植株距和移栽深度稳定,栽植株距、行距及栽植深度等参数可调,适用于辣椒、白菜、西红柿、西兰花等多种蔬菜秧苗的移栽。其与人工作业相比,工作效率高,损伤率和漏栽率低,直立度好,一次完成4行蔬菜移栽,为我国蔬菜产业发展提供了重要的技术装备支撑。
1 整体方案设计及主要技术指标
1.1 整体设计
2ZBX-4型吊杯式蔬菜移栽机主要由机架、三点悬挂装置、地轮、传动系统、座椅、穴盘苗架、移栽单体及覆土镇压轮等组成,如图1所示。使用时,采用29.4kW以上拖拉机牵引,4个移栽单体同时工作,一次完成4行移栽作业,每个移栽单体由投苗杯安装架、投苗杯、箱体及栽植装置等组成。4个移栽单体交错排列,以使移栽后相邻两行秧苗间隔排列,获得充足的生长空间。

1.机架 2.穴盘架 3.座椅 4.三点悬挂机构 5.投苗杯安装架 6.投苗杯 7.箱体 8.覆土镇压轮 9.栽植装置安装架 10.地轮 11.栽植装置 12.传动链条 13.主轴 14.栽植深度调节丝杠
1.2 工作过程
移栽机通过三点悬挂机构与拖拉机挂接,在拖拉机的带动下,地轮转动并通过链条传动将动力传动至主轴,主轴通过链轮链条分别驱动4个移栽单体上的栽植装置转动;栽植器主轴通过链轮链条驱动移栽单体上方的一对锥齿轮转动,进而带动投苗杯的旋转,投苗杯的开合由安装在箱体上方的导轨控制。
在移栽作业开始前,需要先对要进行移栽的土壤起垄作畦。作畦后,地表土壤松软、平整且排水良好,增加了种植层的厚度,便于移栽及覆盖地膜。移栽时,首先将育好的带有秧苗的穴盘放在左右穴盘架上,由人工从苗架取苗并投入旋转的投苗杯中;穴盘苗被投入到投苗杯后,投苗杯旋转至正前方时,投苗杯底座打开;此时栽植器承接杯运行至投苗杯正下方,穴盘苗恰好落入承接杯中,待承接杯运行至最下方时鸭嘴打开,穴盘苗在重力作用下落到穴坑内;随后覆土镇压轮进行覆土和填压,完成栽植过程。
1.3 主要技术指标
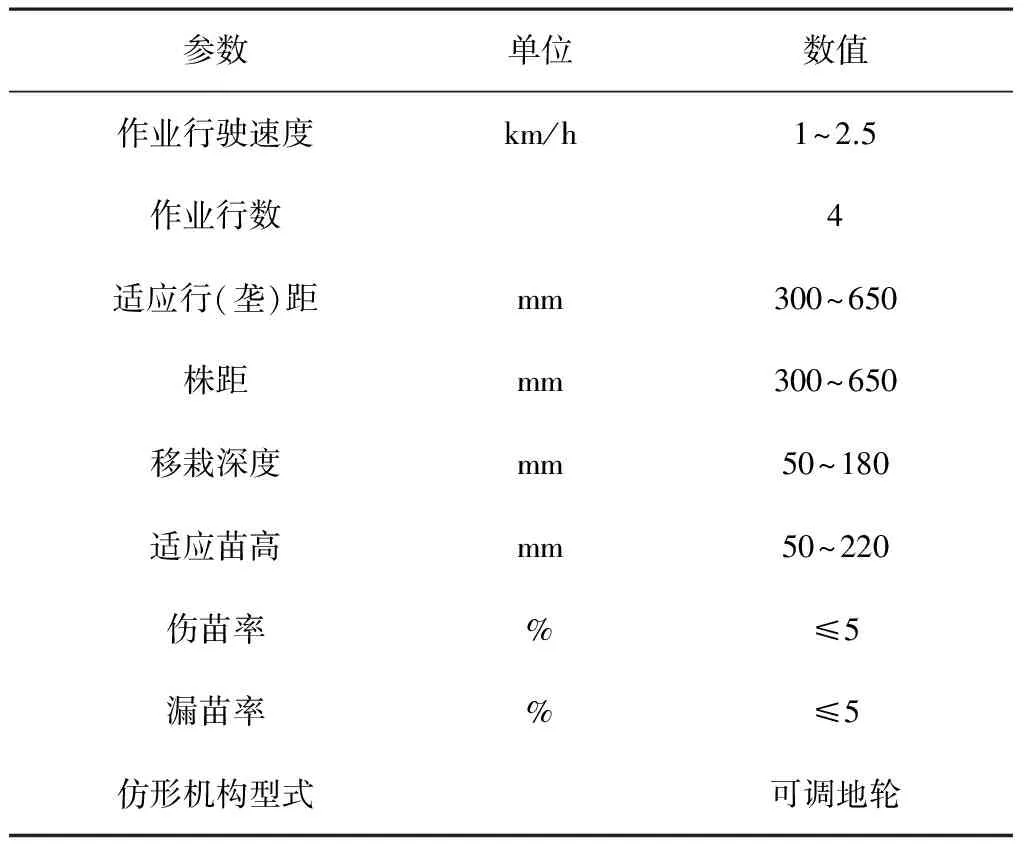
按照旱田蔬菜的种植模式与农艺要求,确定本机的主要技术参数指标如表1所示。
表1 2ZBX-4型吊杯式蔬菜移栽机技术参数
Table 1 Main performance parametersanter of the 2ZBX-4 cup vegetable transplanting machine

参数单位数值整机尺寸(长×宽×高)mm1500×2500×1400配套动力kW≥29.5作业方式牵引式
续表1
2 传动系统及主要工作部件设计
2.1 传动系统设计
2ZBX-4型吊杯式蔬菜移栽机主要采用链轮链条传动,通过链轮轮齿与链条链节的啮合来传递运动和动力。链条传动传动效率高、传动比准确、结构紧凑、适应农田复杂恶劣的工作环境且制造与安装精度要求低,更换方便,成本也低。传动系统简图如图2所示。地轮轴由拖拉机牵引随地轮旋转,经链轮Z1、Z2传动至主轴,随着主轴旋转,动力经链轮Z3、Z4传动至栽植装置轴,带动栽植装置旋转;同时,一部分动力经Z5、Z6传动至一对锥齿轮Z7、Z8,进而带动投苗装置不断旋转投苗。

1.地轮轴 2.主轴 3.栽植装置轴
2.2 栽植装置设计
栽植装置是移栽机的核心工作部件,作用是完成承接穴盘苗、打穴及栽苗工作,主要由滚轮轴承安装盘、控制盘、滚轮轴承、安装盘支撑、安装盘、栽植装置主轴、栽植器支撑板、滚子、复位弹簧、鸭嘴、承接杯、套筒及安装盘等组成,如图3所示。

1.轴承座 2.滚轮轴承安装盘 3.控制盘 4.滚轮轴承 5.安装盘支撑 6.安装盘1 7.栽植装置主轴 8.栽植器支撑板 9.滚子 10.复位弹簧 11.复位弹簧固定螺栓 12.鸭嘴 13.滚子固定螺栓 14.承接杯 15.套筒 16.安装盘2
图3中,承接杯、滚子、复位弹簧固定螺栓、鸭嘴、复位弹簧及滚子固定螺栓组成了栽植器。栽植器通过两侧栽植器支撑板安装在两侧安装盘上,安装盘通过套筒安装在栽植装置主轴上,整个栽植装置通过带座轴承安装在移栽单体机架上。工作过程中,栽植器承接杯杯口需要始终向上承接秧苗,且鸭嘴需要保持朝下状态打穴栽植;为避免栽植器的翻转,在栽植器一端设有控制盘,通过连杆与栽植器连接,控制盘与滚轮轴承安装盘通过滚轮轴承连接。安装盘、控制盘和连杆组成了四连杆机构,其工作时带动栽植器旋转,使承接杯杯口始终朝上且鸭嘴始终朝下,确保了鸭嘴的垂直入土和出土,保证了移栽后秧苗的直立度。栽植器安装板上面设计有凸起,构成凸轮机构,栽植器上方滚子与栽植器安装板组成滚子凸轮机构控制鸭嘴的打开,复位弹簧控制鸭嘴的关闭。
3 栽植株距调节原理与计算
3.1 零速投苗原理
鸭嘴的运动过程是移栽机随拖拉机牵引的匀速直线运动和栽植器绕栽植装置主轴做匀速圆周运动的合成,鸭嘴的运动轨迹如图4所示。选取鸭嘴最低点为参考点,在图4坐标系下建立参考点运动轨迹方程,即
x=Vtt+Rcosωt
(1)
y=-Rsinωt
(2)
(3)
式中x—鸭嘴水平方向位移;
y—鸭嘴垂直方向位移;
Vt—拖拉机前进速度;
ω—栽植装置转动角速度;
t—时间;
R—鸭嘴参考点回转半径;
λ—特征系数。
特征系数λ是参考点旋转的线速度与移栽机的水平前进速度的比值。保证栽植秧苗的直立性是蔬菜种植的基本要求,而要保证栽植钵苗具有理想直立度,需要栽植装置的定植点在水平方向上的瞬时速度矢量和相对地面为零,即“零速投苗”原理[9-12]。按照“零速栽苗”原理,要求投苗时秧苗在水平方向的速度为0,只有当λ>1时,才有可能实现零速投苗。因此,λ>1是移栽机正常工作的必要条件。

图4 鸭嘴最低点运动轨迹
3.2 拖拉机前进速度与株距的关系
拖拉机前进速度与栽植频率f和株距s的关系为
Vt=fs
(4)
3.3 栽植器个数与栽植装置转速的关系
栽植器的数量N与栽植装置转速n的关系为
f=Nn
(5)
3.4 栽植株距的调节
由式(3)和式(5)得
(6)
由式(3)~式(5)得
(7)
综合所述,栽植株距的调整方式有以下3种:
1)根据式(4),采用调整拖拉机行驶速度的方式改变株距,但考虑到目前国内具有爬行挡的拖拉机很少,栽植株距小于30cm的作物时存在一定的困难,必须提高栽植频率才能达到株距要求,而栽植频率是由人工操作的劳动强度决定的,因此可能出现劳动强度大、漏苗等问题[10]。
2)根据式(6),采用调整栽植器数量来调节株距。但是,更改栽植器的同时需要改变机器的传动比,而且栽植器受到结构的限制数量不能太多。
3)根据式(7),采用改变栽植装置转速来改变株距最为简单,只需更换相应链轮改变传动比即可实现。因此,本机采用更换地轮轴上链轮Z1与主轴上链轮Z2来调节株距。
4 田间试验
为了更全面考察2ZBX-4型吊杯式蔬菜移栽机的工作性能,在山东农业大学蔬菜试验基地进行了样机试验,图5为样机进行现场试验图。试验地土壤为砂壤土,土壤含水率为15%,试验前先由作畦机作畦使土壤平整、松软。试验选用软穴盘72(12列×6行)穴,采用苗龄55天、株高16~17cm、基质含水率约18%的辣椒苗移栽,要求移栽株距为38~40cm,移栽深度5~7cm。在试验地每行连续移栽130株苗,用秒表记录试验时间,重复试验3次,试验结果如表2所示,秧苗栽植效果如图6所示。

图5 移栽机试验现场图

试验指标单位试验数值栽植频率株株/min·行45

续表2

图6 秧苗栽植效果
试验结果表明:该机的栽植株距稳定性好,伤苗率低,栽植成功率高,而且链轮更换方便,株距调节准确,能满足实际生产的需要。
5 结论
1)设计了2ZBX-4型吊杯式蔬菜移栽机,该机由拖拉机牵引,人工投苗,可实现半自动化移栽。
2)λ>1是移栽机正常工作的必要条件。
3)分析了株距调节的原理,得到通过更换链轮进而改变栽植装置转速的方式是最简单易行的株距调节方式的结论。
4)对辣椒苗进行了田间移栽试验,结果表明:该机栽植株距和移栽深度稳定,伤苗率和漏栽率低,直立度好,工作效率高,能满足不同地区不同蔬菜的移栽农艺要求。
[1] 陈永生,胡桧,肖体琼,等.我国蔬菜生产机械化现状及发展对策[J].中国蔬菜,2014(10):1-5.
[2] 糜南宏,赵映,秦广明,等.蔬菜全程机械化研究现状与对策[J].中国农机化,2014(3):66-69.
[3] 国家统计局农村社会经济调查司.中国农村统计年鉴2014[M].北京:中国统计出版社,2014.
[4] 崔思远,肖体琼,陈永生,等.日本蔬菜生产机械化发展模式与启示[J].中国蔬菜,2016(2):1-5.
[5] 韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013(8):51-61.
[6] 陈建能,黄前泽,王英,等.钵苗移栽机非圆齿轮行星轮系栽植机构参数分析与反求[J].农业工程学报,2013(8):18-26.
[7] 王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].中国农机化,2003(6):12-14.
[8] 张鹏,曹卫彬,王鹏,等.番茄穴盘苗输送带式移栽机栽植机构的设计研究[J].农机化研究,2013,35(3):70-73.
[9] 崔巍,赵亮,宋建农,等.吊杯式移栽机栽植器运动学分析与试验[J].农业机械学报,2012(S1):35-38,34.
[10] 封俊,秦贵,宋卫堂,等.移栽机的吊杯运动分析与设计准则[J].农业机械学报,2002(5):48-50.
[11] 金诚谦,吴崇友,袁文胜.链夹式移栽机栽植作业质量影响因素分析[J].农业机械学报,2008(9):196-198.
[12] 武科,毕新胜,陈永成.吊篮式移栽机栽植器的研究[J].农机化研究,2010,32(6):73-75,79.
Design and Research of the 2ZBX-4 Cup Vegetable Transplanting Machine
Wu Yanqiang1, Wang Wenli2, Hou Jialin1
(1.Mechanical and Electronic Engineering College, Shandong Agricultural University, Tai'an 271018, China; 2.Agricultural Machinery Safety Supervision Station in Shandong Province, Jinan 250013, China)
According to the current vegetable transplanting machine poor-quality problems,2ZBX-4 cup vegetable transplanting machine was designed,and this paper described how the machine works and analyzed the working process. Towed by a tractor,artificial feeding seedlings,it achieved semi-automatic transplanting. Plant space can be adjusted by changing the driven sprocket. A field test had been carried out using 2ZBX-4 cup vegetable transplanting machine,test results shows that planting spacing and planting depth is very stable,the device has the advantages of the low planted damage and leakage rate,the good upright degree,the high efficiency,which can meet the requirements of different regions in different agronomic transplanting vegetables.
vegetable transplantation; hanging cuptype; plug seedlings; traction-type
2016-03-24
山东省现代农业产业技术体系蔬菜产业创新团队项目(SDAIT-05-11)
吴彦强(1992-),男,山东平原人,硕士研究生,(E-mail)18853818300@163.com。
侯加林(1963-),男,山东高密人,教授,博士生导师,(E-mail)jlhou@sdau.edu.cn。
S223.94
A
1003-188X(2017)08-0107-05
猜你喜欢
煤(2022年6期)2022-06-13
河北农机(2021年11期)2021-11-29
当代水产(2021年4期)2021-07-20
当代水产(2020年4期)2020-06-16
当代水产(2020年4期)2020-06-16
当代水产(2019年9期)2019-10-08
孩子·小学版(2019年11期)2019-09-10
汽车零部件(2018年11期)2018-12-08
农业机械学报(2018年11期)2018-12-04
制造技术与机床(2017年11期)2017-12-18
