
小型农产品分选机的控制系统与控制方法
2017-12-16 08:01邓继忠任高生何明昊
农机化研究 2017年8期
李 山,邓继忠,任高生,何明昊
(华南农业大学 工程学院,广州 510642)
小型农产品分选机的控制系统与控制方法
李 山,邓继忠,任高生,何明昊
(华南农业大学 工程学院,广州 510642)
为减小基于机器视觉的农产品分选机的体积、降低设备成本,提出了一种以DSP为视觉核心、ARM为控制核心的小型农产品分选机。为此,详细介绍了基于机器视觉技术的小型农产品分级机控制系统及控制方法,并以圣女果、金桔及桂圆干等3种物料作为试验对象,测试系统的可靠性和工作效率。结果表明:针对家庭农场及小规模农产品的处理和营销,在基于机器视觉的小型农产品分选机中采用ARM与DSP相结合的方法进行分选是可行的,能够替代PC机或工业计算机实现分选机的低成本和小型化。
农产品;分选机;机器视觉;控制系统
0 引言
我国北方地区重要农产品经过分选,可以优质优价,增加农产品的附加值,提高农产品市场的竞争力。随着图像处理技术的日益成熟、处理器性能提升和成本下降,以图像分析为核心的机器视觉技术已逐步应用于水果、干果、鸡蛋等各类农产品的分级或分选中[1-4]。目前,国内外的各类基于机器视觉的农产品品质分选机主要以PC机或工业计算机为核心,计算机需要完成图像处理与分析、物料位置的确定、缺陷的查找及分类等工作。该类型设备分选功能齐全、生产规模大、分选效率较高,较好地解决了大规模流水线上农产品的检测分选问题[4];但其体积庞大,价格较为昂贵,一般适用于大中型果品加工企业。在我国小规模的农产品生产和经营模式仍保有相当数量的情况下,因体积与价格因素,以PC为核心的机器视觉分选系统在我国的推广与普及受到限制。
针对家庭农场及小规模农产品的处理和营销,本文提出了一种基于机器视觉的小型农产品分选机[5]。该分选机基于低成本、轻简化原则,采用DSP实现图像采集、图像输出、触发式判别,使用ARM实现分选品种更换、控制信号输出;同时,输送带采用多通道方式,摄像机一次可以采集4个通道的农产品图像并进行处理与分析,在确保能对农产品的颜色、形状及缺陷等主要参数进行实时分选的前提下,减小了分选系统的体积,降低了系统的成本,有利于基于机器视觉技术的分选机的推广和应用。
1 小型分选机工作原理
图1所示的系统结构示意图反映了小型分选机的工作原理[5]。

1.水平传送带 2.ARM控制系统 3.摄像机 4.图像采集光室 5.光电传感器2 6.翻板 7.电磁继电器 8.合格物料箱 9.不合格物料箱 10.电机 11.光电传感器1
该系统由传输系统、控制单元、视觉系统及剔除装置(包括电磁继电器、电磁阀、翻板等)组成。工作时,物料首先从送料箱落入传送带上各个分选槽中,然后依靠电机控制传送速度,将物料传送进入图像采集室。DSP对采集到的图像进行预处理和分类识别处理,识别结束后将结果发送给ARM。若判别结果为次品,则由ARM将触发信号送给电磁继电器,电磁继电器控制启动电磁阀拉动翻板,将次品导入到不合格的物料箱;若判别结果为合格品,则不启动剔除装置,不合格物料将自由滑落到合格的物料箱中,完成一次分选动作。
1.1 视觉系统简介
视觉系统以DSP为视觉核心,结合视频采集模块、视频输出模块、光电触发模块,实现视频监控和图像识别。CCD摄像机位于传送带正上方,镜头朝下,实时采集传送带的输送物料,视频信息通过BNC接口传输到DSP芯片。本文采用的DSP型号为TI公司的DM642芯片,摄像机采集到的是25帧/s的PAL制式视频数据流,DSP接收后对视频流进行解码,将每一帧图像数据重复存储在SDRAM某一固定位置中,再将当前存储的每一帧图像数据不断输出到LCD显示屏上。
当图像数据存储在SDRAM中时,可以提取出来对其进行判别处理。但是,如果对每一帧图像都进行判别处理,将给系统带来巨大负荷。因此,本文采用了光电开关触发判别处理的方式,即当传送带上有物料通过光电开光检测区域时,光电开关将产生一个低电平信号,信号下降沿通过GPIO口被读入DM642,触发DM642中断,提取当前SDRAM中的图像数据进行分选处理,而在无物料通过时则不进行判别处理。因此,对于每排物料系统只需处理一张图像即可得到判别结果,从而减轻了系统的负荷,提高了处理的效率。DSP处理完图像后,立即将所得分类结果通过串行口发送给ARM,并等待下一次中断信号。视觉系统处理工作流程如图2所示。

图2 视觉系统处理流程
1.2 控制系统简介
控制系统以ARM为核心,结合人机交互模块、控制信号输出模块、光电触发模块,实现分选模式切换、翻板闭合控制。本文中ARM采用三星公司的S5PV210芯片,为Cortex-A8架构,主频1G Hz,可以流畅地运行Linux系统。
实际分选中,ARM接收从DSP发来的每次处理结果,依次存入存储队列中。当物料传送到水平传送带末端时,触发光电传感器,光电传感器即发送信号给ARM的GPIO口,产生低电平中断。ARM进入中断后,根据“先进先出”原则,从队列中提取出最早的处理结果,根据结果通过GPIO给相应的电磁继电器发送控制信号,电磁继电器的通/断带动电磁开关,以控制翻板的打开或闭合。
同时,ARM将每次合格数和不合格数不断地累加,并保存至对应的结果中,将新的结果显示在触摸显示屏上,以提示用户农产品分选状况;而如果用户需要更换分选的农产品种类时,只需要点击触摸屏选择相应的种类,ARM会根据用户的选择通过串口发送信号给DSP,DSP接收到信号后,会更换分选程序以适应不同种类的分选。ARM控制模块结构简图如图3所示。

图3 ARM控制系统结构简图
2 控制方法
2.1 控制系统中光电开关的设计
本文采用的ARM提供了30个通用I/O口,DSP提供了16个通用I/O口,输入/输出电压为3.3V,可以通过编程设置引脚的输入/输出方向。其中,部分引脚为复用引脚,可以作为I/O引脚,也可以作为其他功能引脚。在本文中根据实际情况需要,在ARM和DSP中各使用1个GPIO引脚,供光电开关触发信号的接入使用。
本文使用的是沪工集团的E3F3系列NPN型的光电开关,属于偏光镜反射型光电开关,投光部与受光部一体化,通过偏光镜反射光光向的变化来检测,这类光电开关能解决物体镜面反射的问题。投光体射出的横向(或者纵向)光波照射到反射板上,反射板将横向(或者纵向)光波改变为纵向(或者横向)光波反射回来,受光部接收到纵向(或者横向)光波认为没有物体遮挡。
光电开关的工作电压为6~36V之间(此处选择6V电压),当输送带上的物料通过光电开关时,光电开关的输出电压由6V变为0V。由于GPIO的输入/输出电压为3.3V,此处使用夏普公司的PC817型号光耦开关实现6V到3.3V的电压转变。如图4所示,默认状态下黑色导线输出电压为6V,光耦开关左侧没有电流通过,右边断开,GPIO输入电压为0V。当有物料通过时,黑色导线输出电压由6V降至0V,左侧产生电流,右边导通,GPIO输入电压上升至3.3V。因此,本文中断触发方式采用上升沿触发。

图4 控制系统中光电开关设计原理图
该系统实现了4路并行处理,每路都有相应的剔除装置对该路物体进行操作,剔出装置使用电磁阀拉动翻板的方式将物体剔除。电磁阀驱动电路的作用是:在GPIO口有3.3V信号输出时,将信号放大成24V电压,驱动电磁阀拉动翻板。
2.2 控制系统中电磁开关的设计
本文针对4通道的需要采用了4个单独的电磁继电器,分别由ARM开发板的4个GPIO口进行控制,电磁继电器和ARM开发板的GPIO之间同样采用PC817光耦开关芯片进行控制。当GPIO口输出高电平时,光耦开关左侧有电流通过,右侧导通;电磁继电器闭合,电磁开关电路导通,在两端附加的24V电压的作用下,将翻板弹起。其电路示意图如图5所示。
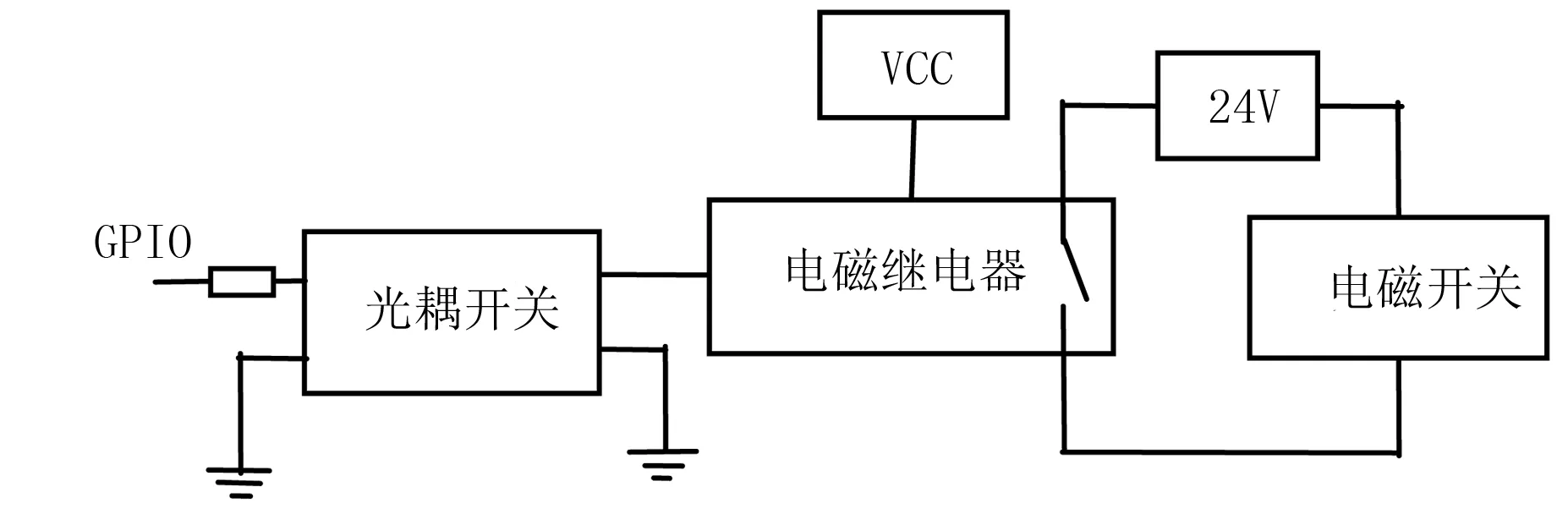
图5 控制系统中电磁开关设计原理图
为了确定翻板打开的时机,需要提前确定物料所在的位置。因此,在水平输送带的末端安装一个光电开关,当物料经过光电开关时,触发高电平信号通过GPIO口传送给ARM,ARM获得有物料通过的信息;随后物料通过倾斜导轨下滑,假设翻板和倾斜导轨最高点距离为s、导轨倾角为θ、重力加速度为g、导轨摩擦因数为μ,则物料到达翻板处的时间为
(1)
由t的表达式可知:物料从触发光电开关到到达翻板位置的时间是一个固定值,与物体的大小质量无关。因此,可以通过多次测试,选定一个合适的翻板开启时间。
2.3 ARM控制系统中界面的设计
本文控制系统中用户操控界面由Qt编写,负责实时显示统计的分选结果,以及为用户提供切换分选品种的功能。每次开机启动Linux系统时,默认自启动用户界面程序,如图6所示。图6中,左侧为种类选择区,已开发圣女果、金桔、桂圆、红枣、核桃、栗子等多种果品分选程序;右下方为状态结果显示区,可以显示好的个数、坏的个数、处理总数、传送带速度和处理速度;正中间显示当前分选品种的图片;右上方为“开始”和“结束”控制按钮。
当用户通过触摸屏点击界面左侧品种名进行分选品种切换时,触发Qt中Button的Click信号,通过配置好的信号与槽的关系,执行相应的槽函数,在槽函数中实现串口数据发送,通知DSP切换对应的分选函数。

图6 用户界面
2.4 控制系统的ARM与DSP的通信
本文中ARM与DSP之间采用RS-232串行口通信,其中RS-232是美国工业电子联盟制定的串行数据通信的接口标准,现已被广泛地用于计算机串行接口外设连接。通信内容如表1所示。

表1 ARM与DSP通信内容
因为本文为4通道并行分选,因此DSP发送的结果需要同时涵盖4个通道的状态。本文采用十六进制数字来表示,如某次分选结果为“0110”(0表示合格,1表示不合格),即第1、4通道的农产品是合格的,第2、3通道的农产品不合格。DSP只需要发送“0x6”即可,因为“0x6”是“0110”的十六进制表示;而ARM检测到发送来的“0x”字符后,随即读取后一位字符,根据该字符的内容控制相应的电磁继电器通断。
ARM发送给DSP的内容不止一项,所以本文采用两类字符分别表示,以便于区别。其中,阿拉伯数字表示分选种类,小写字母表示功能选项。比如“0”代表核桃,“1”代表红枣,“2”代表栗子;“a”表示分选开始,“b”表示分选结束。若DSP从串口读取到“a”,则启动分选程序,默认为核桃模式。若DSP从串口读取到“1”,则将分选代码替换为红枣类。如果后期需要添加新的种类或功能,按数字或字母顺序依次添加即可。
3 试验验证
3.1 材料与方法
采用市售的圣女果、金桔及桂圆干等3种农产品作为分选物料,对圣女果按大小分选,对金桔和桂圆干按颜色分别进行成熟度与破损度分选。
采用不同的物料间距和输送带速率分别进行测试,参见文献[5]。在物料间隔方面,为了防止相邻的物料互相越界干扰,物料间距必须隔1排(约55mm)以上;在输送带速率方面,调速电机有9个不同速度档位(从10到90)可供选择,过低速度影响分选效率,过高速度则剔除装置无法及时反映。通过测试,选择30、40、50等3档进行试验。
3.2 试验结果
1)分选的可靠性。对所有物料测试了图像分析耗时、翻板控制耗时,以及翻板在不同传送带输送速度和不同物料间距下动作的可靠性。经过反复多次的测试与统计,在平均每次分选中,图像处理与分析耗时约0.206 2s;翻板控制中,至少需要持续向电磁开关输出约0.3s的电压,才可实现翻板的完全打开。表2所示为物料间距与传输速度对剔除装置是否可靠动作(即翻板是否打开)的影响。由表2可知:当速率为40档(约18cm/s)、物料间隔2排(同一通道排队分选物料的平均间距约160mm)时,在保证可靠性的前提下,分选效率(单位时间的分选数量)最高。
表2 不同传送速率和物料间距对系统可靠性的影响
Table 2 Effect on system reliability of different transmission speed and material spacing

物料间距30档40档50档隔1排翻板未打开图像已处理翻板未打开图像已处理翻板未打开图像未处理隔2排翻板打开图像已处理翻板打开图像已处理翻板未打开图像已处理隔3排翻板打开图像已处理翻板打开图像已处理翻板打开图像已处理
2)分选效率。3种物料各150个,圣女果按大小分选,金桔与桂圆干分别按颜色测试成熟度和破损度。试验表明:①圣女果、金桔和桂圆干的分选准确性分别为93.91%、97.19%和86.11%;②当电机速度设定为40档(约18cm/s)时,可以进行可靠处理的分选效率最高,4通道每小时处理个数约为16 000颗。按所处理物料的平均单粒重推算,3种物料的最大处理效率分别为:圣女果337kg/h,金桔311kg/h,桂圆干228kg/h。
4 结论
采用DSP作为视觉处理核心、ARM作为控制核心,开发了基于机器视觉的小型农产品分选机的控制系统与控制方法,可以根据系统图像识别的结果,控制传送带末端农产品的筛选。同时,用户可以根据需要,无需专业人员指导,点击触摸屏即可更换分选种类,实现了在不更换设备的情况下多种类农产品的分选功能。
试验结果表明:在一定的分选速度下,分选系统动作可靠,表明采用ARM与DSP相结合的方法开发小型农产品分选机是可行的,可替代PC机或工业计算机,实现分选机的低成本和小型化。其中,基于ARM的嵌入式linux系统具有良好的可移植性、稳定性及低功耗等特点,且具有丰富的应用开发工具和成熟的开发环境,很适合作为基于机器视觉的分选机控制系统核心。
本文考虑到DSP强大的计算能力及高度的灵活性和可编程性,因此图像识别部分在独立的DSP中执行。随着ARM芯片性能不断的提高,内部也集成了DSP、存储器、各种接口控制模块等部件,构成了一个完整的片上系统。后续研究可以将图像识别部分也并入ARM模块中,省去独立的DSP芯片,进一步降低成本,使系统更集成化、小型化。
[1] 孔彦龙,高晓阳,李红玲,等.基于机器视觉的马铃薯质量和形状分选方法[J].农业工程学报,2012,28(17):143-148.
[2] 陈红,夏青,左婷,等.基于机器视觉的花菇分选技术[J].农业机械学报,2014,45(1):281-287.
[3] 王润涛,张长利,房俊龙,等.基于机器视觉的大豆籽粒精选技术[J].农业工程学报,2011,27(8):355-359.
[4] 王福娟. 机器视觉技术在农产品分级分选中的应用[J].农机化研究,2011,23(5):249-252.
[5] 邓继忠,李山,张建瓴,等.小型农产品分选机设计与试验[J].农业机械学报,2015,46(9):245-250.
[6] Mizushima A, Lu R. A Low-cost color vision system for automatic estimation of apple fruit orientation and maximum equatorial diameter[J].Transactions of the Asabe, 2013, 56(3):813-827.
[7] Elmasry G, Cubero S, Molto E, et al. In-line sorting of irregular potatoes by using automated computer-based machine vision system[J]. Journal of Food Engineering, 2012, 112(1-2):60-68.
[8] Baigvand M, Banakar A, Minaei S, et al.Machine vision system for grading of dried figs[J].Computers and Electronics in Agriculture, 2015,119:158-165.
[9] Donis-Gonzalez I R, Guyer D E, Fulbright D W, et al.Postharvest noninvasive assessment of fresh chestnut (Castanea spp.) internal decay using computer tomography images[J]. Postharvest Biology and Technology, 2014,94:14-25.
[10] 马秀莲,衣淑娟.基于嵌入式系统与机器视觉的上孵前无精蛋识别系统[J].农业机械学报,2011,42(5):187-192.
[11] 刘俭英,田茂胜,王巧华,等.基于DSP的鸡蛋破损检测分级装置设计[J].农业机械学报,2007,38(12):125-128.
[12] 许红玉,张东兴. 基于计算机视觉的水果分选机实时控制系统[J].农机化研究,2006(8):104-105.
[13] 安爱琴,余泽通,王宏强.基于机器视觉的苹果大小自动分级方法[J].农机化研究,2008(4):163-166.
[14] 郑冠楠, 谭豫之, 张俊雄, 等. 基于计算机视觉的马铃薯自动检测分级[J]. 农业机械学报, 2009(4):166-168.
[15] 陈红, 夏青, 左婷, 等. 基于机器视觉的花菇分选技术[J]. 农业机械学报, 2014(1):281-287.
[16] 党宏社,宋晋国,郭琴.基于ARM的嵌入式水果大小检测与分级系统的实现[J].四川农业大学学报,2011,29(1):89-93.
The Control System and Control Methods of a Small-scale Agricultural Products Sorting Machine
Li Shan, Deng Jizhong, Ren Gaosheng, He Minghao
(College of Engineering, South China Agricultural University, Guangzhou 510642, China)
In the aims of lowering the size and cost of agricultural products sorting machine, we raised an small-scale sorting machine with DSP-based vision kernel and ARM-based controlling kernel. The control system and the control method of the machine vision-based agricultural product sorting machine were introduced in this paper, and cherry tomatos,cumquats and dried longans were used to estimate the reliability and working efficiency of the system. The results showed feasibilities of machine vision-based agricultural product sorting machine featured with ARM and DSP in the aim of the processing and merchandising of small-size agricultural products, together with replacing PC and industrial computers in order to achieve lower size and cost of sorting machine.
agricultural products; sorting machine; machine vision; control system
2016-07-05
广东省科技计划项目(2013B020313003) ;国家星火计划项目(2011GA780026)
李 山(1992-),男,江西景德镇人,硕士研究生,(E-mail) 597330918@qq.com。
邓继忠(1963-),男,新疆乌苏人,副教授,博士,(E-mail)jz-deng@scau.edu.cn。
TS255;S126
A
1003-188X(2017)08-0112-05
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
知识就是力量(2021年9期)2021-09-18
探索科学(学术版)(2021年7期)2021-08-05
建材发展导向(2021年10期)2021-07-16
军民两用技术与产品(2021年9期)2021-03-09
商品与质量(2020年33期)2020-11-07
商品与质量(2019年35期)2019-11-28
中国生物医学工程学报(2019年4期)2019-07-16
现代商贸工业(2018年31期)2018-12-08
智能建筑电气技术(2015年5期)2015-12-10
