
基于DSP与超声波测距的农业机器人定位与避障控制
2017-12-16 08:01王盟
农机化研究 2017年8期
王 盟
(天津冶金职业技术学院 电子信息工程系,天津 300400)
基于DSP与超声波测距的农业机器人定位与避障控制
王 盟
(天津冶金职业技术学院 电子信息工程系,天津 300400)
随着新兴电子集成技术和自动化技术的发展,控制系统已逐渐向数字化转变,高集成芯片广泛应用于自动化控制领域,体积小、运算能力强的嵌入式系统慢慢开始取代计算机。为此,首先分析了超声波测距功能及其优越性,采用三球定位技术,设计研究了一种基于DSP和超声波的全局定位系统;然后,采用多路超声波收发模块设计了基于超声波的自主避障控制系统,并提出一种新的模糊推理方法,实现机器人的避障和路径规划功能;最后,采用Visual C++可视化程序设计软件对避障系统进行仿真和场地试验,验证了系统的可靠性和可行性,为机器人的研究和发展提供了更加宽广的空间。
农业机器人;定位;避障;DSP;超声波测距;路径规划
0 引言
随着农业科技的不断发展,机械自动化、计算机控制系统、测试计量技术、无线传输技术飞速发展,农业机器人研究取得了很大进展。农业机器人结合了传感器、机械制造、无线通信、仪器仪表和自动化控制工程等多学科,已成为科技研究最前沿的领域之一。本文以DSP处理器为核心,以超声波测距的原理为基础,设计和研究了基于DSP与超声波测距的农业机器人定位与避障控制系统。系统根据超声波传感器对农业机器人进行定位和避障操作,并采用Visual C++可视化软件对避障系统进行仿真试验,验证了系统的可靠性和稳定性。
1 超声波测距在农业机器人中应用的原理
由于超声波频率高,沿直线传播特性和指向性都很强,传输过程中衰减少,能量消耗缓慢,在介质中传播的距离较远,易于获得较集中的声能,因此常常用于测距、测速、清洗、碎石及消毒等,在医学、军事、工业、农业上有很多的应用。利用超声波检测方便、简单、可做到实时监控,且测量精度好,因此广泛用于机器人的定位与避障。
1.1 超声波及其性质
超声波因其频率下限高于人的听觉上限而得此名。与光不同的是,超声波需要借助介质的分子运动才能传播,声波频率越高,波长越短,其绕射能力就约弱。因此,其在同一介质传播速度固定。在理想环境中,超声波传播的质点位移可以表达为
(1)
其中,S(t)为位移量;A0为初始振幅的参考值;ω为角频率;t为声波传输所需时间;x为声波传输距离;α为衰减系数;k为波数。
由式(1)可知:声波在传播过程中,传输距离x越大,其振幅A(x)越小。声波衰减系数α与频率f及传播介质有一定的关系,可表示为
α=Ae·f2
(2)
其中,Ae为传播介质;f为声波振动频率。
由式(2)可以看出:频率越高,声波衰减系数就会越大,信号就越弱;反之,频率越高,声波衰减系数就越小,信号就越强。此外,声波还具有另外一个非常重要的特性:当其频率越高,传播的波束就越窄。同时,高频声波与低频相比拥有的能量更大,传播的距离更远,反射能力更强。在应用中,为了让声波发射距离更远,衰减更低,一般选择40kHz左右的频率比较合适。为了实现农业机器人的定位、避障功能,必须具备测距的功能。超声波硬件成本低、精确度高、模块化程度高,因而在农业机器人的应用非常广泛。
1.2 超声波测距的原理
超声波测距的基本原理是:发射器向外发射信号,当信号碰到障碍物时会发生反射,然后被接收器接收,系统停止计时;系统可根据超声波在空气介质中的传播速度及信号发射接收的时间计算出被测物体与系统间的距离。超声波系统测距公式为
(3)
其中,S为系统与被测物体距离;c为超声波在介质中的传播速度;t为发射与接收的时间差。
从式(3)可以看出:超声波测距最重要的就是对时间的检测,方法主要有可变阈值法、包络峰值法和相位法。对于不同的应用场合,选用的方法不同。超声波测距有直射式和反射式两种,如图1所示。
图1(a)为直射测距法,设备主要由发射和接收模块构成;图1(b)为反射测距法。超声波发射器向某一方向发射声波,信号发射时计数器计时,信号碰到障碍物面阻挡反射回来,接收器收到信号就停止计时;当被测物体与系统之间距离足够大时,可认为发射器和接收器在同一质点上,即两者到障碍物的距离相同。在实际应用中,测量远距离和移动性物体时反射式使用比较广泛;而直射式测量精度更高,在连续波相移法中应用较多。在本文定位系统的设计研究中,测距系统采用直射式方式,而在自动避障控制部分则采用反射式方式。
2 农业机器人定位与自动避障控制系统
2.1 农业机器人定位系统
超声波定位系统是由多个传感器、根据某种特定的方式构成的系统,其在农业机器人局部定位中应用广泛。该系统往往由多个接收器和一个发射器构成。发射器固定在农业机器人上,根据超声波的测距功能,实现物体的定位,如图2所示。在L1和L2各安放着一个接收器,L1和L2连线的中点为原点O,在农业机器人S上安放一个发射器,利用三点法进行测量可以测出坐标,则
(4)
其中,xs、ys分别为农业机器人的横、纵坐标。

图2 超声波定位系统示意图
其中,xs的正负取值由O点与机器人的位置决定。定位系统的原理是将发射端安放于被测物体上,并将接收端(基点)规则地安放在附近位置;然后由待定位农业机器人发射信号,基点接收信号,计算每个基点与农业机器人的距离,并通过无线传输模块将数据送至DSP处理器进行计算,从而求解出农业机器人的坐标。
本文设计的超声波定位系统,将发射器安放在机器人上,接收器安放于附近物体上作为基站,发射器发射信号,由固定基站接收并测量距离,传送给处理器求出机器人坐标。利用三球定位技术,建立该定位系统的计算模型,如图3所示。

图3 三球定位原理的计算模型
如图3所示:在实验室天花板安放3个接收器作基站,假设3个基站位置分别为A0(0,0,H),A1(x1,y1,H),A2(x2,y2,H),农业机器人在水平地面的坐标为S(x,y,0),利用三边计算公式进行计算,则
(5)
其中,H为天花板高度;d0、d1、d2为A0、A1、A2与农业机器人之间的距离。利用式(5)求解出农业机器人坐标S(x,y,0),即求得的其唯一坐标值。
2.2 农业机器人自动避障控制系统
在机器人的发展中,其自动避障控制一般都在地图环境确定的情况下进行。但在机器人实际应用中,常常需要在环境未知或地图不准确时作业,往往会导致之前的地图信息和传感器实际感知的相差太多。因此,由机器人实时检测前方障碍物并重新规划路径就非常重要。随着农业机器人应用场合的不断增多,其灵活避障的能力越来越重要,是机器人完成复杂环境下导航任务的重要条件。机器人避障系统主要由探测系统、信息处理及避障策略组成。
由于农业机器人需要在未知环境下进行自主移动行走,需要具备自主检测障碍物并避开的功能。超声波收发模块以反射方式感知障碍物及其距离,由于其受环境因素干扰小,而且在夜晚也能准确探测和测量障碍物及其距离,因此能够给机器人的避障决策提供重要信息参考。在农业机器人避障系统中,采用多路超声波传感器以实现自动避障功能。
本文设计的系统包括定位和避障两部分,DSP处理器处理任务繁重。为了减轻其负担,提高系统运行速度,本设计采用模糊推理控制技术,并根据多路超声波探测信息进行分类存库,在模糊控制基础上对机器人进行实时路径规划。农业机器人避障控制系统的模糊推理原理如图4所示。

图4 避障系统的模糊推理框架图
为了实现自主避障,在该机器人的前、左、右等多个方向安装了5组超声波收发模块。模块将测距信息传送给DSP处理器,然后建立模糊规则库,根据信息处理结果判断机器人的运动路径和运动方向。
3 系统的软硬件设计
3.1 硬件设计
本文设计核心处理器采用TI公司最新研究设计TMS320F2812处理器,其数据处理能力强、运行速度快,且SARAM和Flash片内存储资源丰富。本文根据传感器接收模块的组成结构和DSP的工作特性,提出了基于DSP与超声波测距的定位与避障控制系统。定位与避障系统的硬件框架图5所示。

图5 定位与避障系统的硬件框架图
本系统搭建在农业机器人试验平台上,系统以TMS320F2812处理器为控制核心,并集成无线传输模块、直流驱动电机、测距传感器及超声波收发模块,可以实现农业机器人的定位以及避障功能。
3.2 软件设计
农业机器人的定位系统主要是由发射模块将信号发射出去,然后由接收基站接收;基站处理好数据信息后由无线模块将数据传送为处理器,然后根据每个基点与农业机器人的距离并利用三球定位原理求出机器人的具体坐标位置。农业机器人超声波定位系统软件流程如图6所示。

图6 农业机器人超声波定位系统软件流程图
系统上电后,程序开始初始化,并且设置一系列参数; 然后,主程序调用定位子程序,子程序根据采集到的数据信息计算坐标值,从而判断确定机器人的具体位置。
农业机器人避障系统软件设计主要包括主程序、外部中断、距离计算及避障策略等子程序。机器人避障系统软件流程如图7所示。

图7 农业机器人避障系统软件流程图
4 系统仿真和场地试验
机器人定位和获取障碍物信息是判断采摘机器人性能是否优良的重要条件,为了验证农业机器人定位和避障系统是否满足设计需要,本文采用计算机Visual C++可视化程序设计软件对避障算法进行仿真和场地试验。由于农业机器人常常需要在复杂环境下躲避障碍物,因此除了对可预测的避障环境信息进行仿真外,还需要任意搭建障碍物环境,以验证系统的可行性和稳定性。农业机器人避障仿真轨迹如图8所示。
图8中:系统两次仿真都以S为起点、E为终点,障碍物由系统随机构建,由各种实心矩形和圆形组合表示。不难看出,本文设计的农业机器人自主避障系统在复杂的环境下仍可圆满地实现避障功能,且系统可靠性高,规划轨迹距离短。
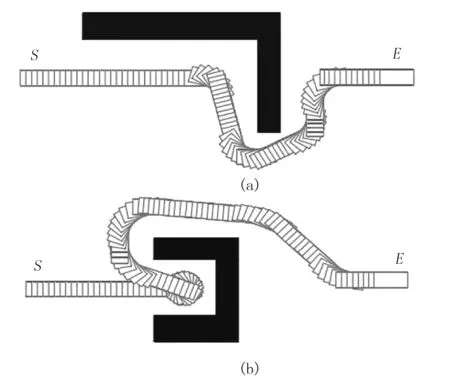
图8 农业机器人避障仿真轨迹
5 结论
首先分析了超声波测距的原理及其优越性,并根据实际需求,采用三球定位原理,设计研究了一种基于DSP和超声波的定位系统。其次,采用多路超声波收发模块设计了基于DSP与超声波的自主避障系统,系统结合神经网络、模糊控制在机器人避障中的应用,提出一种模糊推理方法,能够实现机器人的避障和路径规划功能,为机器人在复杂环境作业的自主移动提供了保障。最后,通过Visual C++可视化程序设计软件对避障算法进行仿真和场地试验,保证了系统的可靠性和可行性。
[1] 陈志灵.智能农业机器人嵌入式控制系统开发与设计[D].西安:西安理工大学,2008.
[2] 任立敏.基于激光测距仪的农业机器人障碍感知与避障策略研究[D].哈尔滨:哈尔滨工业大学,2007.
[3] 王栋. 基于多超声波测距与模糊控制的农业机器人自主避障[D].青岛:中国海洋大学,2008.
[4] 曾一民.基于超声波的机器人避障和目标跟踪方法的研究[D].成都:电子科技大学,2008.
[5] 谢克炜.农业机器人室内复杂场景下的动态路径规划[D].大连:大连理工大学,2008.
[6] 于竹林.嵌入式农业机器人避障研究与系统设计实现[D].青岛:青岛科技大学,2009.
[7] 陈东.基于农业机器人平台的一种避障算法研究[D].北京:北京邮电大学,2010.
[8] 李玮.农业机器人避障双目立体视觉算法研究[D].南京:南京理工大学,2006.
[9] 王斌明.基于多传感器信息融合的农业机器人避障研究[D].南京:南京理工大学,2006.
[10] 胡劲草.基于超声波测距技术的自主式农业机器人导航系统研究[D].武汉:武汉理工大学,2007.
[11] 钱信.基于ARM的农业机器人设计及避障研究[D].南昌:南昌大学,2012.
[12] 苑洁.基于STM32单片机的高精度超声波测距系统的设计[D].保定:华北电力大学,2012.
[13] 陈硕.基于多传感器信息融合的农业机器人路径规划研究[D].哈尔滨:哈尔滨工程大学,2012.
[14] 李翠花,梁德民,周晓美. 高精度的超声波测距系统的设计与实现[J].合肥学院学报:自然科学版,2012(1):41-44.
[15] 任亚楠,贾瑞清,何金田,等.基于超声波传感器的农业机器人避障系统研究[J].中国测试,2012(3):76-79.
[16] 陈卫平.全区域覆盖自主农业机器人路径规划与避障的研究[D].南京:南京理工大学,2004.
[17] 单承刚.嵌入式Linux下农业机器人超声波测距系统[J].信息化纵横,2009(5):21-23.
[18] 张树刚.基于超声波的农业机器人局部避障算法及应用[D].哈尔滨:哈尔滨工业大学,2013.
[19] 金娟.自主农业机器人轨迹跟踪与避障控制研究[D].长沙:湖南大学,2014.
[20] 杨冬梅.基于无线传感器网络的多农业机器人避障方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[21] 王富.未知环境中农业机器人定位与建图技术的研究[D].哈尔滨:哈尔滨工业大学,2013.
[22] 徐跃.基于超声波测距的机器人定位与避障[D].济南:齐鲁工业大学,2013.
[23] 黄庆成,洪炳镕,Javaid Khurshid,等.全自主足球机器人的超声波定位避障系统[J].哈尔滨工业大学学报,2003(9):1077-1079.
[24] 张旭.基于多传感器信息融合康复机器人感知系统设计[D].成都:电子科技大学,2015.
[25] 李恒,徐小力,左云波.农业机器人超声波测距避障系统设计[J].现代电子技术,2014(3):157-159,162.
[26] 曹玉华.超声测距系统设计及其在机器人模糊避障中的应用[D].青岛:中国海洋大学,2007.
[27] 刘颜.基于DSP的农业机器人控制系统设计与避障算法的实现[D].北京:北京交通大学,2007.
[28] 罗维平.基于DSP的农业机器人自动避障控制系统研究[J].伺服控制,2008(8):31-33,67.
Localization and Obstacle Avoidance Control of Agricultural Robot Based on DSP and Ultrasonic Distance Measurement
Wang Meng
(Department of Electronic Information Engineering, Tianjin Metallurgical Vocation-technology lnstitule, Tianjin 300400,China)
With the development of the electronic integration technology and automation technology, control system has gradually shift to digital high integrated chip widely used in the field of automation and control, small volume, strong computing ability of embedded system slowly began to replace the computer. At first, this paper analyzes the ultrasonic ranging function and its advantages, the three global positioning technology is researched and designed a kind of global positioning system based on DSP and ultrasonic. Then the multi-channel ultrasonic transceiver module design the ultrasonic based autonomous obstacle avoidance control system, and puts forward a new method of fuzzy reasoning, realizes the robot obstacle avoidance and path planning function; at last, using Visual C + + programming visualization software for obstacle avoidance system simulation and field test to verify the reliability and feasibility of the system,which provides a broader space for the research and development of the robots.
agricultural robot; location; obstacle avoidance; DSP; ultrasonic distance measurement; path planning
2016-05-06
天津市教委教育信息化战略研究基金项目(X2014-022);教育部高校硕士点基金项目(200801120007)
王 盟(1983-),男,河北邯郸人,讲师,硕士,(E-mail)thehuahuu@sina.com。
TP242;U463.6
A
1003-188X(2017)08-0207-05
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
中国外汇(2019年20期)2019-11-25
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2017年7期)2017-06-05
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
