
鸭式旋翼/机翼飞机悬停状态飞行动力学特性
2017-12-20 11:02高红岗高正红邓阳平曹煜
航空学报 2017年11期
高红岗,高正红,邓阳平,曹煜
西北工业大学 航空学院,西安 710072
鸭式旋翼/机翼飞机悬停状态飞行动力学特性
高红岗,高正红*,邓阳平,曹煜
西北工业大学 航空学院,西安 710072
针对鸭式旋翼/机翼(Canard Rotor/Wing,CRW)飞机独特的气动布局,常规的分析方法及经验公式很难准确地对CRW飞机进行飞行动力学研究,通过飞行辨识对CRW飞机悬停状态特性进行了研究。首先,设计了飞行试验并获得了高质量的飞行数据,基于频率响应对CRW飞机的状态空间模型进行了简化。然后,在频域内对飞机的动力学参数进行了拟合优化,获得了CRW飞机悬停状态的动力学模型,并用飞行数据对所建模型进行了验证。最后,用辨识所得参数与常规直升机悬停状态时的参数进行了对比。结果显示悬停时CRW飞机的操纵导数和阻尼导数均比常规直升机小,经分析,操纵导数的减小主要是CRW飞机独特的旋翼设计所致,阻尼导数减小的原因主要是旋翼气动影响以及鸭翼、平尾、垂尾的结构影响。动力学特性分析结果为CRW飞机旋翼模式总体设计的进一步优化提供了指引和参考,所建立的模型可用于控制系统设计。
鸭式旋翼/机翼(CRW);直升机;动力学特性;悬停;飞行辨识
鸭式旋翼/机翼(Canard Rotor/Wing,CRW)飞机是一种新型可垂直起降、高速巡航的飞行器,其最大特征就是有一副既可以高速旋转作为旋翼,又可以锁定作为固定翼的主机翼,在军民用航空领域拥有十分广泛的应用前景。
波音公司在20世纪90年代初提出CRW飞机概念并于1998年与美国国防预研局签订合同,进行CRW飞机设计方案的论证和飞行试验,实现了翼尖喷气旋转机翼的驱动与控制,2004年完成旋翼垂直起降飞行,前飞时失控飞机坠毁,未完成飞行模式转换飞行试验。国外针对CRW飞机开展了较多研究,Bass等[1]以1∶5缩比模型进行风洞试验,研究了CRW飞机以低速旋翼模式以及固定翼飞行时的空气动力学特性,Crossley和Bass[2]结合空气动力学分析程序和结构设计程序来提高叶片结构设计的精度,Osder[3]设计了CRW飞机的导航、制导和控制系统等。国内在CRW飞机方面起步较晚,但是目前已经作了大量的基础研究,孙威等[4-5]对椭圆对称旋翼的气动特性进行了研究,邓阳平[6]和何澳[7]等对旋翼与机翼的气动干扰进行了研究,史振兴和高正红[8]对转换时旋翼卸载特性进行了研究,李毅波等[9]对转换末段的气动特性进行了研究。但对CRW飞机飞行动力学特性的研究并不多,目前只有少数CRW飞机机理建模[10-11]和配平研究[11-12]。
飞机飞行动力学模型可以用来评估飞机总体设计的结果是否满足预期指标,同时也可以根据飞行动力学模型分析的结果指引飞机的总体及飞控系统设计。飞机的飞行控制系统的设计需要可信度较高的模型,尤其一些基于模型的先进控制方法,对飞机飞行动力学模型的要求更高。所以飞机飞行动力学特性研究对飞机总体设计和飞行控制系统设计都很重要。
CRW飞机旋翼飞行模式主要完成垂直起降、悬停与低速飞行,其中,悬停是反映旋翼效率的重要飞行模式。因此,本文主要研究CRW飞机(见图1)悬停状态的飞行动力学特性。
与传统直升机不同,CRW飞机为了兼顾旋翼和固定翼模式的飞行,旋翼设计采用前后缘对称的椭圆翼型,并且旋翼具有小展弦比、小桨盘面积的特点,同时为了补充在旋翼飞行与固定翼飞行两种模式转换时需要的升力,采用带鸭翼的三翼面布局,以及通过增加鸭翼和平尾的面积来提供附加升力和保持纵向飞行稳定[11]。由于采用了非常规的气动布局,单纯通过工程分析与一定的风洞试验数据建模,难以准确表达CRW飞机的飞行动力学特性。相比之下,飞行试验辨识建模可以充分反映各种气动干扰的影响,能建立精度较高的飞行动力学模型。由于频域辨识方法可以消除与输入或者输出不相干噪声的影响,参数拟合时可以选取线性相关度较高的频段进行拟合[13]等,因而本文通过模型飞机飞行试验,并采用频域辨识的方法来获取CRW飞机悬停状态的飞行动力学模型。
在前期试验中发现CRW飞机悬停及小速度飞行时纵横向稳定性不足,所以本文首先设计了CRW飞机旋翼模式的增稳控制系统。在此基础上设计了扫频飞行试验。通过辨识获得CRW飞机悬停状态的动力学模型,并与常规直升机(见图2)悬停状态的动力学模型进行对比(图1与图2中的桨毂、动力与传动系统均相同),期望揭示CRW飞机旋翼模式与同量级的常规直升机动力学特性的差别,为CRW飞机旋翼模式的总体设计提供指引。

图1 自研的CRW飞机Fig.1 Our CRW aircraft

图2 常规直升机Fig.2 Conventional helicopter
1 CRW飞机本体悬停状态动力学模型
本文研究的CRW飞机采用电机驱动旋翼,为了平衡主旋翼的反扭矩在飞机尾部设计了尾桨系统。CRW飞机的主要设计参数如表1所示。
假设CRW飞机为刚体,利用小扰动线化理论,对CRW飞机的六自由度运动方程线化后可得状态空间模型[14-17]为

Y=CX
(1)
式中:X=[uvwθφψqpr]T为状态变量,u、v、w分别为飞行速度在体轴系x、y、z轴上的分量,θ、φ、ψ分别为俯仰角、滚转角、偏航角,q、p、r分别为俯仰角速度、滚转角速度、偏航角速度;U=[δlonδlatδpedδcol]T为操纵变量,δlon、δlat、δped、δcol分别为纵向周期变距、横向周期变距、尾桨桨距、总距;Y=[axayazθφψqpr]T为输出变量,ax、ay、az分别为体轴系3个方向的线加速度;A为气动导数矩阵;B为操纵导数矩阵;C为输出矩阵。A、B、C的表达式为

表1 CRW飞机主要设计参数Table 1 Main design parameters of CRW aircraft
A=

式中:X、Y、Z和L、M、N分别为体轴系3个方向上的力和力矩;Xu为变量X对u的导数,其他变量的含义与之类似;A(1,:)、A(2,:)、A(3,:)分别为矩阵A的第1、2、3行。
2 CRW飞机旋翼模式增稳控制系统设计
在缺乏准确的飞行动力学模型的前提下,本文设计了利用模型飞行试验,进行飞行控制设计的方法。首先针对CRW飞机在悬停飞行试验中稳定性较差的问题,分别在俯仰、滚转、航向3个通道增加了阻尼器。试验结果表明,飞机的稳定性得到了一定的改善,但操纵手操纵起来依然很吃力,为了进一步改善飞机的稳定性,又增加了俯仰通道与滚转通道的姿态自动控制系统,如图3所示,并通过飞行试验,对控制参数进行了调整优化。经过试飞测试,在该增稳控制系统的作用下,操纵手可以轻松控制CRW飞机以旋翼模式进行飞行,这为之后在CRW飞机旋翼模式下进行各种试验提供了平台。
图3中,各通道输入信号为遥控器杆量,k1、k2、k3为遥控器杆量与姿态指令的映射系数,文中所用futaba遥控器发射的杆量信号为PWM(Pulse Width Modulation)信号,操纵杆最大行程对应的操纵量为±0.5 ms,文中设定遥控器杆量最大行程所对应的俯仰角和滚转角的指令为±90°、航向角速度的指令为±180 (°)/s,所以:k1=k2=90/0.5=180 (°)/ms,k3=180/0.5=360 (°)/(s·ms)。k4,k5,…,k9为阻尼器和姿态控制器的参数,参数值是通过试飞调试确定的。

图3 CRW飞机旋翼模式增稳控制系统Fig.3 Stability augmentation control system of CRW aircraft rotor mode
3 飞行试验设计
为了通过飞行试验获得CRW飞机本体的飞行动力学模型,首先对飞行试验进行设计,提出能够反映CRW飞机动力学特性的操纵输入,以及设计获取CRW飞机本体操纵输入和响应的数据采集方案。
3.1 操纵输入信号设计
扫频信号能够提供均匀的功率谱激励[13],所以频域辨识一般用扫频信号作为操纵输入。用于系统辨识的操纵输入需要能够激励出系统所有感兴趣的模态。同时设计激励信号时还需考虑飞行试验的安全性,操纵信号频率太高可能激励出结构模态等不希望出现的模态,所以设计的输入信号能充分激励感兴趣的所有模态即可,其频率范围在试验时应该被严格控制。图4为典型的扫频输入信号。设计输入信号的关键是确定所需操纵信号的最小频率ωmin和最大频率ωmax。因为直升机短周期模态的频率是本体模态里频率最高的,所以只要知道了短周期模态的大致频率也就能够确定操纵输入需要的最大频率。文中在正式飞行辨识之前,对飞机进行了试探性飞行试验,初始选取较小的频率范围进行扫频飞行,然后求得系统的半对数频率响应,看幅值曲线里有没有出现斜率变化为-40 dB/dec (dec表示十倍频)的转折频率,若没有则继续扩大操纵输入的频率范围进行试验,直到系统的幅值曲线里出现斜率变化为-40 dB/dec的转折频率,此时转折频率即为短周期模态的初始估计值,如图5所示,初步估计出短周期模态的频率为8 rad/s。理论上只要操纵输入的最大频率大于短周期模态频率即可,考虑到实际飞行中外界的干扰,文中扫频信号最大频率ωmax取短周期模态频率的1.5倍,即12 rad/s。操纵输入最小频率ωmin参照文献[13]取0.6 rad/s,所以取CRW飞机扫频输入频率范围为0.1~2 Hz。
扫频时应该从低频到高频逐渐过渡,其中扫频起始处应该有2个完整的长周期输入,对应最小频率的最大周期Tmax=2π/ωmin,扫频数据记录总长度Trec根据经验公式[13],满足Trec≥(4~5)Tmax。
需要注意的是,对某个通道进行扫频试验时,需要对其他通道给出必要的控制输入,以使其他通道处于配平状态。

图4 典型的扫频输入信号Fig.4 Typical frequency sweep input signal

图5 转折频率的估计Fig.5 Estimation of turning frequency
3.2 试验数据的采集
本文是用闭环飞行试验来辨识开环本体的模型,在飞行试验过程中,飞机的响应可以直接测量获得,飞机本体的桨距无法直接测量,但可以测得回路内执行机构舵机的输入信号(见图6)。为此首先需要通过地面试验,建立舵机输入信号和旋翼的周期变距以及总距变化的对应关系,然后对飞行试验中测量到的舵机输入信号根据映射关系获得周期变距及总距等CRW飞机的本体输入。图6为俯仰通道飞行试验和地面试验数据测量结构图,其他通道的测量与之类似。
图6中,俯仰通道飞行试验时测量的输入输出数据分别为舵机的输入信号δPWMlon和飞机的响应θ、q、ax。地面试验时测量的信号为δPWMlon和δlon。
试验所用舵机的带宽为30 rad/s的量级,远高于CRW模型飞机的带宽(约为7 rad/s), 在辨识模型中可以忽略舵机的动态特性影响。因此,飞行试验数据中提取CRW飞机本体的操纵输入时,只考虑其静态特性。地面试验测试了舵机和自动倾斜器的静态传递系数。俯仰通道的舵机输入信号与纵向周期变距之间的关系如图7所示。图中试验结果表明,俯仰通道舵机输入与纵向周期变距呈线性关系,通过拟合后可得舵机和自动倾斜器的静态传递系数为δlon/δPWMlon=15.78 (°)/ms,根据飞行试验时测量到的俯仰通道舵机的输入乘以所求的传递系数即可获得CRW飞机旋翼模式的纵向周期变距,应用同样的方法可获得横向周期变距、总距和尾桨桨距。这样就获得了辨识CRW飞机本体所需要的输入信号,输出信号可以直接测量获得。

图6 俯仰通道飞行试验和地面试验数据测量结构图Fig.6 Data measurement structure diagram of flight test and ground test of pitch channel

图7 俯仰通道舵机输入与纵向周期变距的关系Fig.7 Relationship between steering gear input and longitudinal cyclic pitch in pitch channel
4 CRW飞机本体悬停状态动力学模型辨识
4.1 数据分析与处理
以俯仰通道扫频试验为例,扫频时各通道的输入信号和飞机响应分别如图8和图9所示。从图8和图9中可以看出数据未出现漂移等现象,部分数据噪声较大,对其进行滤波处理。并对数据进行相容性检验,由于在扫频飞行试验中飞机的运动满足配平状态下的小扰动假设条件,所以姿态测量值可通过以下表达式进行相容性检验[16]:

图8 俯仰通道扫频时各通道的输入信号Fig.8 Input signals of each channel in pitch channel frequency sweep test

图9 俯仰通道扫频时飞机的响应Fig.9 Aircraft response in pitch channel frequency sweep test

(2)
相容性检验时,可对式(2)右边的角速度测量值进行积分,并与姿态角测量值进行比较,看是否相等。图9中的q和θ相容性检验结果如图10所示,从图中可以看出q和θ的相容性较好。对其他通道的扫频数据进行了同样的分析处理。
由于本文中线运动测量值只有三轴加速度ax、ay、az,没有u、v、w等多余的测量,所以ax、ay、az未进行相容性检验。

图10 测量值q积分后与测量值θ对比Fig.10 Contrast of integration of q and θ
4.2 频率响应
由于CRW飞机旋翼模式各通道间有不同程度的耦合,对任何一个通道进行扫频飞行试验时,为了使飞机其他通道参数稳定在参考配平状态,需要在相关的通道施加一些由驾驶员产生的次要输入。因此在飞机的响应中,将同时包含主要输入和次要输入的影响,需要在辨识中消除混入的次要输入的影响。为此在辨识时,首先需要通过对频率响应进行处理,以提取出主要通道的频率响应。
以航向通道为例,CRW飞机旋翼模式存在航向和垂向的轴间耦合,在进行航向通道扫频时,垂向通道存在相关的操纵输入,这就使得部分航向角速度是由垂向操纵引起的,因此在进行辨识之前需要去除垂向输入对航向通道的影响。忽略纵向和横向操纵输入的影响,航向和垂向操纵输入对偏航角速度的影响如图11所示。
图11中,KCF是航向通道与垂向通道的相干系数,δcol,c是与航向输入相关的垂向输入,δcol,uc是与航向输入不相关的垂向输入,r/δped是航向输入对偏航角速度的频率响应,r/δcol是垂向输入对偏航角速度的频率响应。根据偏相干分析有
(3)
(4)
式中:Sδpedr和Sδcolr分别为输入δped和δcol与输出r的互谱;Sδpedδped和Sδcolδcol分别为航向和垂向输入的自谱;Sδpedδcol和Sδcolδped为航向和垂向2个输入之间的互谱。联立式(3)、式(4)可得

(5)
根据飞行试验数据,计算相应的功率谱,根据式(5)可以得到去除了垂向输入干扰的航向通道的频率响应。同理可得其他通道去除干扰后的频率响应。

图11 航向通道输入和垂向通道输入对偏航角 速度的影响框图Fig.11 Schematic of effect of heading channel input and vertical channel input on yaw rate
4.3 参数优化
(6)


(7)

4.4 基于频率响应的模型简化
当某个频率响应对的相干值在所关心的频率范围内非常低时,则应将该响应对从式(7)的辨识代价函数中去除,同时去除式(1)中与此频率响应相关的导数,对模型结构进行简化。比如图12给出了纵向输入δlon到偏航角速度r的频率响应的相干函数。从图中可以看到r/δlon的相关性很差,可以认为从δlon到r之间没有明显的能量传递,因此,状态空间模型中偏航力矩与纵向输入和纵向状态变量相关的导数应该被置0,即矩阵A和B中Nu、Nq、Nδlon均置为0。用同样的方法对所有频率响应对的相干函数进行分析,最终简化后的矩阵A和矩阵B的表达式为

图12 频率响应r/δlon的相干函数Fig.12 Coherence function for frequency response r/δlon
A=
5 辨识结果及对比分析
5.1 CRW飞机旋翼模式动力学模型辨识结果
对图1中自研的CRW飞机进行悬停状态的扫频飞行试验并进行动力学模型辨识。矩阵A中导数Xθ=-gcosθ0cosφ0、Yφ=gcosθ0cosφ0,θ0、φ0为俯仰角、滚转角的悬停配平值,g为重力加速度。从扫频飞行试验悬停时的数据中获得俯仰角、滚转角的悬停配平值分别为-3°和5°,则可求得Xθ=-9.75 m/s2、Yφ=9.75 m/s2,辨识时将其设为定值,对其他参数进行优化,并计算了各参数的Cramer-Rao边界,本文采用Cramer-Rao边界所占辨识参数值的百分比来表示,即

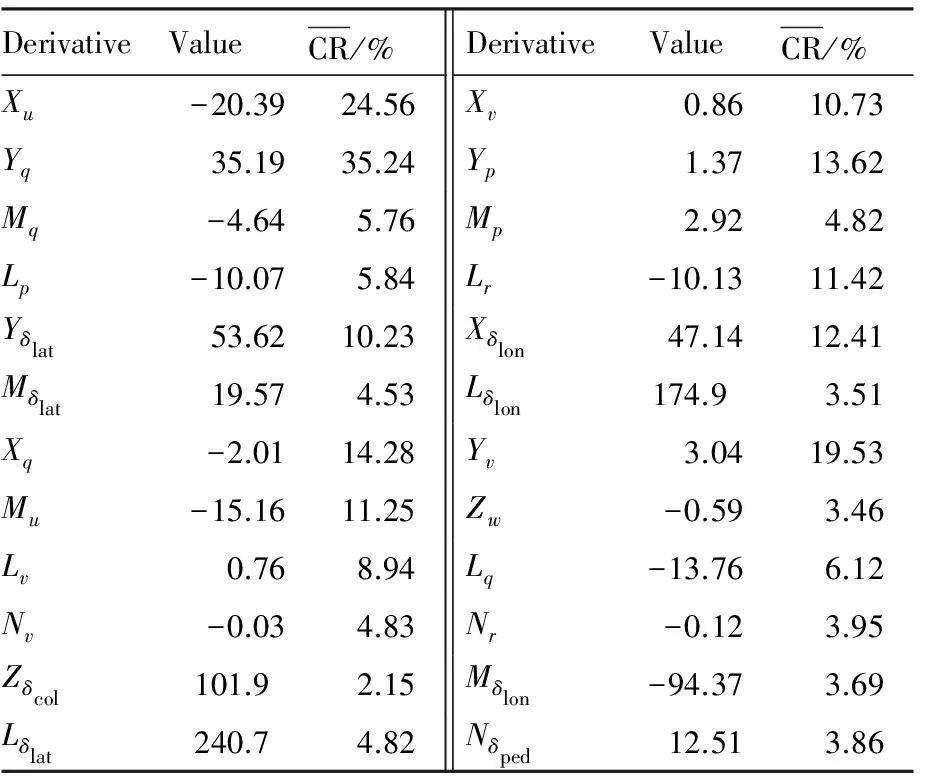
表2 辨识结果Table 2 Identification results
从表2可以看出各参数的Cramer-Rao边界大多小于20%,说明辨识结果可靠性较高,少数超出Cramer-Rao边界的参数也予以了保留。
频率拟合结果如图13所示,图13中q/δlon为纵向周期变距到俯仰角速率的频率响应,p/δlat、r/δped、az/δcol的含义与之类似。从图13中可以看到,辨识所得模型的频率响应与飞行试验的频率响应匹配较好,说明在所研究的频率范围内,辨识所得模型可以很好地表达CRW飞机的频率特性。
为了验证辨识所得模型在时域也能很好地表达CRW飞机,利用与辨识时所用不一样的飞行数据对辨识所得模型进行时域验证,用实际飞行时的操纵输入作为模型输入,解算出模型的预测响应,并与实际飞行响应进行对比,检验辨识模型的准确度。图14给出了三轴角运动和线运动的时域验证结果,从图中可以看到角运动吻合得较好,线运动中ax、ay高频部分模型预测的不是很好,但是大致趋势一致。总的来说时域验证结果较好。说明飞行试验辨识可以获得精度较高的飞行动力学模型,这与引言中的说法一致。

图13 主要频率响应的拟合结果Fig.13 Fitting results of some primary frequency responses
辨识所得的CRW飞机悬停状态的动力学模型可以用来校验CRW飞机旋翼模式的设计是否满足指标要求,同时也可以根据动力学特性的分析结果来指引CRW飞机的总体设计,此外,这也为后续飞行控制系统的设计奠定了基础。

图14 时域验证结果Fig.14 Time domain verification results
5.2 与常规直升机对比分析
对图2中的常规直升机同样采用上述方法进行建模,并与自研的CRW飞机在悬停状态时的主要导数和运动模态进行对比,结果如表3和表4所示。
从表3可以看出悬停时CRW飞机的阻尼导数和操纵导数都比常规直升机小了很多。经分析操纵导数减小的主要原因是CRW飞机的旋翼为椭圆对称翼型,其气动效率较常规旋翼低一些所致。阻尼导数减小的主要原因一方面来自旋翼气动的影响,另一方面来自鸭翼、平尾、垂尾的结构影响,悬停时鸭翼、平尾和垂尾无前向来流,当有小的角速率变化时只能产生很小的气动阻尼,但较大的鸭翼、平尾和垂尾增大了全机的三轴惯性矩,导致阻尼导数减小。
从表4可以看出悬停状态时CRW飞机主要运动模态相比常规直升机频率低了不少,短周期模态的阻尼也较低。CRW飞机旋翼模式的模态与常规直升机对应,没有出现新的模态。同时也可以看到CRW飞机悬停时有一对正的共轭复根,这也验证了引言中所说的CRW飞机稳定性不足的结论。

表3 CRW飞机和常规直升机悬停状态的导数对比

表4 CRW飞机和常规直升机悬停状态的特征值对比Table 4 Comparison of eigenvalues of CRW aircraft and conventional helicopter in hover
6 结 论
1) 飞行数据与模型预测结果非常接近,证明所建模型可信度较高,文中所建立的模型可用于CRW飞机悬停状态控制系统的设计。
2) 通过与常规直升机悬停状态主要导数的对比,发现CRW飞机悬停时的三轴阻尼导数比常规直升机小了很多,这可能导致CRW飞机悬停时的稳定性较常规直升机差,对控制系统的设计提出了更高的要求。同时也为CRW飞机旋翼模式的总体优化设计提供了指引,在固定翼模式允许的范围内尽可能在设计时增大CRW飞机旋翼模式的阻尼,改善稳定性。
3) 通过与常规直升机悬停状态的特征值对比,发现CRW飞机悬停时短周期模态的频率比常规直升机低很多,这会使CRW飞机悬停时受扰后的恢复较慢。同样这一问题一方面可以通过设计控制系统来改善,另一方面可以在总体设计时进行优化。
本文的研究工作不仅为获得CRW飞机本体悬停状态飞行动力学模型提供了思路,而且通过与常规直升机动力学特性的对比分析,加深了对CRW飞机悬停状态的动力学特性的认识,为后续的研究奠定了基础。
[1] BASS S M, THOMPSON T L, RUTHERFORD J W, et al. Low-speed wind tunnel test results of the canard rotor/wing concept:AIAA-1993-3412[R]. Reston,VA: AIAA, 1993.
[2] CROSSLEY W A, BASS S M. Using aerodynamic analysis codes to assist in structural design and optimization of ducted rotor/wing blades:AIAA-1992-4280[R]. Reston,VA: AIAA, 1992.
[3] OSDER S S. Integrated navigation, guidance, and control for canard rotor/wing (CRW) aircraft[C]∥13th Digital Avionics Systems Conference. Piscataway, NJ: IEEE Press, 1994: 181-189.
[4] SUN W, GAO Z H, DU Y M, et al. Mechanism of unconventional aerodynamic characteristics of an elliptic airfoil[J]. Chinese Journal of Aeronautics, 2015, 28(3): 687-694.
[5] 孙威,高正红,黄江涛,等.旋转机翼悬停气动特性研究[J].空气动力学学报,2015,33(2):232-238.
SUN W, GAO Z H,HUANG J T, et al. Aerodynamic characteristics of hovering rotor/wing[J]. Acta Aerodynamica Sinica, 2015, 33(2): 232-238 (in Chinese).
[6] 邓阳平,高正红,詹浩.鸭式旋翼/机翼飞机悬停及小速度前飞气动干扰实验研究[J].实验力学, 2009,24(6):563-567.
DENG Y P, GAO Z H, ZHAN H. Experimental investigation on aerodynamic interactions of canard rotor/wing aircraft in hover and low speed forward flight[J]. Journal of Experimental Mechanics, 2009, 24(6): 563-567 (in Chinese).
[7] 何澳,高正红,邓阳平,等.旋转机翼对CRW飞机气动特性影响的动态试验研究[J].实验流体力学,2013,27(3):13-16.
HE A, GAO Z H, DENG Y P, et al. A wind tunnel study on aerodynamic characteristics of CRW plane by the rotor/wing[J]. Journal of Experiments in Fluid Mechanics, 2013, 27(3): 13-16 (in Chinese).
[8] 史振兴,高正红.鸭式旋转机翼飞机过渡段旋翼卸载特性分析[J].飞行力学,2014,32(4):298-302.
SHI Z X, GAO Z H.Analysis of unloading characteristics of the canard rotary wing airplane blade in transitional process[J]. Flight Dynamics, 2014,32(4):298-302 (in Chinese).
[9] 李毅波,马东立,牛凌宇.鸭式旋翼/机翼飞行器转换末段气动特性[J].北京航空航天大学学报,2011,37(3):311-315.
LI Y B, MA D L, NIU L Y.Aerodynamic characteristic of canard rotor/wing aircraft in conversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3): 311-315 (in Chinese).
[10] 盖文东,王宏伦,李大伟.鸭式旋翼/机翼无人机飞行动力学建模与分析[J].空气动力学学报,2012,30(2):244-249.
GAI W D,WANG H L, LI D W. Flight dynamics modeling and analysis of canard rotor/wing UAV[J]. Acta Aerodynamica Sinica, 2012, 30(2): 244-249 (in Chinese).
[11] 梁琨,邓阳平,高正红.旋转机翼飞机旋翼飞行动力学模型及配平[J].飞行力学,2010,28(5):5-8.
LIANG K, DENG Y P, GAO Z H. Model and trimming of rotor-wing plane at rotor-wing flight mode[J]. Flight Dynamics, 2010, 28(5): 5-8 (in Chinese).
[12] 李星,高正红,刘艳.三翼面CRW飞机纵向最优配平点研究[J]. 飞行力学,2010,28(3):13-16.
LI X, GAO Z H, LIU Y.Longitudinal optimal trimming points research for three-surface CRW aircraft[J]. Flight Dynamics, 2010, 28(3): 13-16 (in Chinese).
[13] REMPLE R K,TISCHLER M B. Aircraft and rotorcraft system identification[M]. Reston,VA:AIAA, 2006.
[14] 王适存.直升机空气动力学[M].南京: 南京航空学院,1985: 24-28.
WANG S C. Helicopter aerodynamics[M]. Nanjing:Nanjing Aviation College, 1985: 24-28 (in Chinese).
[15] 高正,陈仁良.直升机飞行动力学[M].北京: 科学出版社,2003:43-55, 64-65.
GAO Z, CHEN R L. Helicopter flight dynamics[M]. Beijing: Science Press, 2003: 43-55, 64-65 (in Chinese).
[16] 方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京: 北京航空航天大学出版社,2015:174-203.
FANG Z P, CHEN W C, ZHANG S G. Aviation aircraft flight dynamics[M]. Beijing: Beihang University Press, 2015: 174-203 (in Chinese).
[17] 方振平.飞机飞行动力学[M].北京: 北京航空航天大学出版社,2008:64-135.
FANG Z P. Aircraft flight dynamics[M]. Beijing: Beihang University Press, 2008: 64-135 (in Chinese).
[18] TISCHLER M B, LEUNG J G M, DUGAN D C. Frequency-domain identification of XV-15 tilt-rotor aircraft dynamics: AIAA-1983-2695[R]. Reston, VA: AIAA, 1983.
[19] 顾冬雷,高正,孙传伟.无人直升机控制动态特性的频域辨识建模方法[J].南京航空航天大学学报,2004,36(6):688-692.
GU D L, GAO Z, SUN C W. Frequency domain identification for unmanned helicopter[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2004, 36(6): 688-692 (in Chinese).
[20] 夏慧,陈庆伟,王冠林,等.无人直升机频域辨识模型参数摄动分析[J].电光与控制,2012,19(8):54-58.
XIA H, CHEN Q W, WANG G L, et al.Frequency domain identification model’s parameter perturbation analysis for an unmanned rotorcraft[J]. Electronics Optics and Control, 2012, 19(8): 54-58 (in Chinese).
Flightdynamiccharacteristicsofcanardrotor/wingaircraftinhover
GAOHonggang,GAOZhenghong*,DENGYangping,CAOYu
SchoolofAeronautics,NorthwesternPolytechnicalUniversity,Xi’an710072,China
FlighttestidentificationisadoptedinthestudyofflightdynamicsofCanardRotor/Wing(CRW)aircraftbecauseconventionalmethodsandempiricalformulasarenotsuitableforflightdynamicanalysisofCRWaircraftduetoitsuniquelayout.Theflighttestisfirstdesignedandhighqualitydataareobtained.Basedonthefrequencyresponse,thestatepacemodeloftheCRWaircraftissimplified,andthekineticparametersoftheaircraftareoptimizedinthefrequencydomain.AhighconfidencedynamicsmodeloftheCRWaircraftinhoveristhenobtainedandconfirmedbytheflightdata.AcomparisonbetweentheCRWmodelandtheconventionalhelicoptermodelinhovershowsthatthecontrolderivativesandthedampingderivativesoftheCRWaircraftaresmallerthanthoseoftheconventionalhelicopter.Itisfoundthatthedecreaseofthecontrolderivativesismainlyduetotherotoraerodynamiccharacteristics,andthereasonforthedecreaseofdampingderivativesismainlythedesignofcanard,horizontaltailandverticalfin.ThecomparisonresultsprovideguidanceandreferenceforfurtheroptimizationofCRWaircraftrotormodedesign,andthedynamicsmodelcanbeusedtodesignthecontrolsystem.
canardrotor/wing(CRW);helicopter;dynamiccharacteristics;hover;flightidentification
2017-01-17;Revised2017-03-05;Accepted2017-04-30;Publishedonline2017-05-310931
URL:http://hkxb.buaa.edu.cn/CN/html/20171103.html
.E-mailzgao@nwpu.edu.cn
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.121139
V212.4
A
1000-6893(2017)11-121139-12
2017-01-17;退修日期2017-03-05;录用日期2017-04-30;< class="emphasis_bold">网络出版时间
时间:2017-05-310931
http://hkxb.buaa.edu.cn/CN/html/20171103.html
.E-mailzgao@nwpu.edu.cn
高红岗,高正红,邓阳平,等.鸭式旋翼/机翼飞机悬停状态飞行动力学特性J.航空学报,2017,38(11):121139.GAOHG,GAOZH,DENGYP,etal.Flightdynamiccharacteristicsofcanardrotor/wingaircraftinhoverJ.ActaAeronauticaetAstronauticaSinica,2017,38(11):121139.
(责任编辑:鲍亚平,王娇)
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
航天器环境工程(2020年3期)2020-11-04
电子制作(2019年9期)2019-05-30
消费导刊(2018年8期)2018-05-25
电子制作(2017年8期)2017-06-05
演艺科技(2017年3期)2017-05-03
移动通信(2016年22期)2017-03-07
北京航空航天大学学报(2016年8期)2016-11-16
科技视界(2015年25期)2015-09-01
