
光电稳瞄系统内框架动力学模型修正方法研究
2018-01-11 12:24李世尧张卫国侯军占王明超
电光与控制 2017年11期
李世尧, 张卫国, 侯军占, 王明超, 王 谭
(西安应用光学研究所,西安 710065)
光电稳瞄系统内框架动力学模型修正方法研究
李世尧, 张卫国, 侯军占, 王明超, 王 谭
(西安应用光学研究所,西安 710065)
为提高光电稳瞄系统内框架结构动力学模型准确度和仿真分析效率,提出了基于多种群遗传退火算法的结构动力学模型修正方法。以某光电稳瞄系统内框架为研究对象,通过动力子结构法建立有限元模型,对比模态测试结果,采用多种群遗传退火算法及相关性分析对有限元模型进行修正,得到全局优化下内框架轴承的六向刚度值,并对修正后的模型进行了实验验证。结果表明,有限元模型与实验结果能较好地匹配,各阶模态相关性在0.8以上,频率误差在9.05%以内,计算效率提高95%以上。最终形成了高效可行的模型修正方案,为光电稳瞄系统内框架结构设计提供了重要的参考。
光电稳定瞄准系统; 内框架; 动力子结构法; 遗传退火算法; 模型修正
0 引言
光电稳瞄系统在现代战争中发挥着极其重要的作用。稳定平台内框架作为光电稳瞄系统的关键部件,其结构动力学特性是影响稳瞄系统伺服控制精度及性能的主要因素之一。因此,开展光电稳瞄系统内框架结构动力学模型修正方法研究,能够为光电稳瞄系统性能改进及内框架结构设计提供重要的理论依据。
近年来,国内外学者主要通过模态分析法研究光电稳瞄系统内框架的结构动力学特性[1],但由于内框架结构复杂,仿真结果和模态实验结果偏差很大[2]。因此需要将仿真分析与实验分析相结合,利用实验数据对有限元模型参数进行模型修正,获得能够更加真实反映实际结构的仿真模型。虽然相关研究人员对模型修正开展了大量研究工作[3],但应用于光电稳瞄系统内框架的模型修正方法研究却不多,且对内框架的结构动力学研究,多数仅局限在内框架的一些部件[4]。目前对于内框架的模型修正还需在两个方面进一步研究:1) 内框架结构动力学分析存在的仿真分析繁琐复杂、耗时较长的问题;2) 模型仿真分析结果存在的误差较大的问题。误差较大的原因主要是因为轴承刚度分析不准确,由于轴承预紧力难以精确量化,在对轴承连接体进行动力学仿真时,通常将被轴承连接的零件直接刚性连接,或者按照经验估测刚度参数,导致仿真模态分析结果和实验结果产生很大的误差,不满足高精度仿真的需要[5-13]。
针对以上问题,本文提出了一种基于多种群遗传退火算法的结构动力学模型修正方法。以某光电稳瞄系统内框架为研究对象,利用动力子结构法简化有限元模型,并对模型进行仿真模态分析;在此基础上,对内框架进行模态测试,对比模态测试结果,采用多种群遗传退火算法及相关性分析对轴承刚度进行修正;最后,得到全局优化下内框架轴承的六向刚度值,并对修正后的模型进行了实验验证。
1 有限元仿真
1.1 有限元模型构建
欲通过模型修正获得准确的光电稳瞄系统内框架模型,首先要建立完整的有限元模型。
在NX软件中对某光电稳瞄系统的内框架进行三维建模。内框架上的关键误差——螺纹连接和轴承连接结构的建模误差对仿真结果的影响显著。由于内框架上的螺纹连接结构会增加有限元仿真的计算量,而且若用接触来代替螺纹连接,对原力学特性影响较小,所以建模过程中删去了螺纹连接结构[4]。
本文用Matrix27单元来模拟轴承连接关系。ANSYS中Matrix27单元是ANSYS中的一种两节点单元,可以用来模拟刚度、质量或者阻尼单元。该单元具有6个独立的实常数,分别对应于6个方向的刚度值。如图1所示,轴承内外环之间用1个Matrix27单元连接,Matrix27单元(中间粗线)的2个节点分别和相邻零件(轴承内圈和轴承外圈)上的所有节点耦合,形成2个刚性区域。
通常情况下,轴承工作在良好的润滑状态,其轴向转动摩擦可以忽略不计,故在此把对应于轴承轴向转动刚度的实常数设置为0。本文将利用模型修正技术对其余五向刚度参数进行修正。内框架具有4个轴承,由于X向(俯仰)2个轴承相同,Y向(方位)2个轴承相同,所以需要修正的刚度值K为10个。

图1 Matrix27单元Fig.1 Matrix27 unit
相对于传统建模方法中将内框架的4个轴系部分简化为4个圆柱(如图2a所示),本文的研究对轴系进行了完整的建模(如图2b所示)。内框架材料见表1。

图2 简化模型和完整模型对比Fig.2 The simplified model and the complete model

材料弹性模量/GPa密度/(kg·m-3)泊松比部件铝2A126828000.33轴承压圈铁镍软磁合金20082000.30旋变电机铸镁ZM54118100.34内俯仰万向架钛合金TC410944400.34定子座转子座轴承钢GCr1521278100.29轴承磁钢21072000.29驱动电机
1.2 动力子结构法简化模型
为提高仿真计算效率,应用动力子结构法进行模型简化。动力子结构法按照一定的原则将复杂整体结构拆分成若干子结构,然后根据各子结构的连接条件,建立协调方程,把所有的子结构综合形成整体结构。该方法可在不影响计算精度的情况下提高计算速度[14]。在模型修正过程中,研究对象有限元模型中发生变化的部分集中在轴承等效简化模型部位,其余部分参与计算但参数(材料参数、网格尺寸等)并不发生改变。针对这个特点,将研究对象划分为3部分,应用模态综合法来提高修正效率。对整个内框架使用动力子结构法进行建模简化,将其划分为6个子结构,见表2。
针对简化模型,采用典型模态分析算法Block lanzos算法进行自由模态分析。在此,动力子结构法选取主节点只需选取模型部分节点:1) 与实验测点相对应位置处的节点;2) 与Matrix27相连的点,这样将原结构中的282 196个节点减少为2452个节点。

表2 子结构包含部件
为证明子结构法测试结果准确性,在ANSYS中完成动力子结构法与完整模型的仿真模态分析结果对比,如表3所示,二者最大相对误差仅0.044%。

表3 子结构法与完整模型各阶频率对比
自由模态分析结果见图3所示。该仿真时间可缩短至2 min以内,对比原本单次模态求解耗时40 min,计算效率提高95%以上。
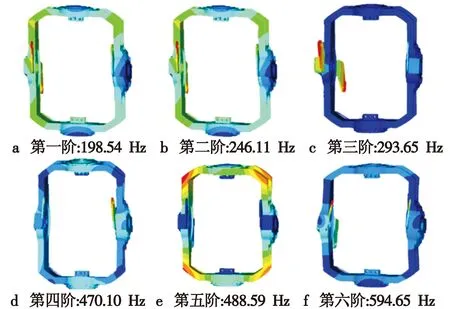
图3 模态振型云图Fig.3 Modal shape deformation
2 模态测试
完成仿真分析后需要进行实验,用实验结果来验证仿真结果的正确性。采用M+P振动控制模态测试分析系统对光电稳瞄系统内框架进行模态测试。在内框架上布置16个传感器,用弹性较好的软尼龙绳将整个内框架悬挂,模拟内框架无约束的自由边界条件,如图4所示。
采用锤击法完成实验。前6阶模态振型见图5。对比图3和图5可以看出,仿真模态分析的频率和模态测试频率最大误差为25.15%,产生于第2阶振型。误差过大,这样的模型是无法应用于工程实际研究的。因此,需要将实验结果和有限元计算结果进行有限元模型修正。

图4 内框架自由模态测试Fig.4 Free modal test of inner-gimbal

图5 模态测试结果Fig.5 Modal test results
3 模型修正
3.1 相关性分析
评价仿真分析结果和实验结果的一致性,需要进行相关性分析。本文采用模态置信准则(MAC),以模态参数为修正目标进行模型修正。MAC常用于评价2个振型的一致程度。其基本思想是将结构的振型用向量表达,通过比较2个向量的相关性来实现对振型相似程度的评价[4]。对于2个振型向量ψAi和ψTi,其MAC值计算式为

(1)
式中:ψAi表示第i阶仿真振型向量;ψTi表示第i阶测试振型向量。从式(1)可以看出,MAC值总是介于0和1之间,且越接近于1表示两者相关性越好,反之,则越差。一般情况下,考虑到试验误差,通常2个振型的MAC值大于0.8即认为相关性好。
本文参数修正以计算固有频率与实测固有频率的相对差值最小化为目标,即
min(max[ε1,ε2,…,εi])
(2)
式中:
εi=abs(fAi-fTi)/fTi
(3)
εi表示第i阶计算固有频率相对于测试值的误差;fAi表示第i阶仿真固有频率;fTi表示第i阶测试固有频率。
为保证振型一致,以模态振型相关系数MAC值大于0.8为约束,即
MAC(ψA,ψT)>0.8 。
(4)
在未进行模型修正之前,将模态测试获得的六阶振型和仿真获得的六阶振型直接进行相关性比较,如图6所示。

图6 实验结果和仿真结果相关性比较Fig.6 Correlation analysis of test results and simulation results
从图6中可以看出,有五阶振型的相关性超过0.8,这五阶的相关性分别为0.821,0.868,0.870,0.812,0.886,可认为这五阶振型相关性良好。
但对于光电稳瞄系统的高精度结构,这样的结果是不够理想的,更为理想的结果是,表中对角线上的元素全都大于0.8,而非对角线上的元素接近0,因此需要进行模型修正。
3.2 遗传退火算法
确定了修正目标后,就要为模型修正选择、设计高效的修正算法。以多种群遗传退火算法作为修正算法来实施模型修正,该算法具有良好的全局寻优能力,同时又克服了遗传算法的早熟现象,提高了求解效率,一定程度上避免算法陷入局部最优解,提高算法的全局寻优能力[3]。模型修正算法流程如图7所示。

图7 算法流程图Fig.7 Flow chart of algorithm
在Matlab中编写遗传算法程序并拟出目标函数,然后对仿真结果进行修正。综合考虑频率差和振型相关性制定目标函数为
Objv()=eer+10max([ceil(max(1-mmac)×10),2.5])
(5)
式中:mmac为MAC矩阵的所有元素;eer为相对频率误差之和;ceil函数的作用是向离它最近的大于它的整数取整。
目标函数Objv()的值越小代表二者越接近,即修正结果越好。目标函数的意义是提供同时评价频率和振型相关性接近程度的标准,其中振型相关性的权重比频率大,使得在修正前几代能快速获得振型相关性较好的结果,同时后期能使频率差更小,避免陷入局部最优解。第1代修正结果为Objv()=1010。从第42代开始,Objv()收敛于403左右。修正50代,第50代的目标函数值为403.39。该结果相比于第1代的1010准确度提高了99.9%,可认为是理想的结果。第50代修正结果见表4。

表4 第50代修正结果
此时,刚度最优值见表5。其中,K1对应于X向(俯仰)轴系六向刚度(X向转动刚度为0),K2对应于Y向(方位)轴系六向刚度(X向转动刚度为0)。此时相关性分析结果如图8所示。

表5 刚度最优值

图8 修正50代后相关性比较Fig.8 Correlation analysis after 50 generations
从表4可以看出,对应模态的MAC值都在0.8以上,此时频率误差最大为9.05%;从图8可以看出,除对角线元素在0.8以上,其余都接近零。因此,此时修正后的模型是准确的。
4 修正模型的验证
为验证模型修正的准确性,开展了进一步验证实验工作。在内框架上安装光具座,再次进行模态测试和仿真计算,并进行相关性分析。光具座是光电稳定平台的重要部件,是CCD、红外成像系统和陀螺仪等光电传感器的安装基座。
安装光具座前后两次模态测试结果见表6。二者不仅各阶频率不同,各阶阵型也不相同。

表6 加入光具座与不加光具座各阶频率对比
可见加入光具座之后对于结构整体影响很大,不仅体现在整体质量上,还体现在整体和局部的刚度上。在这种情况下,讨论修正后模型的适用程度有重要意义。将光具座模型添加到如图2所示的整体模型之中。加入光具座之后的仿真模态分析振型与实验结果对应较好,实验结果和仿真结果频率误差最大为6.07%。相关性分析如图9所示,从图中可以看出,以上六阶模态振型相关性分别为0.92,0.86,0.87,0.91,0.98,0.896 1,即MAC值都在0.8以上,因此,仿真模型是准确的。

图9 相关性分析结果Fig.9 Correlation analysis results
5 结束语
本文对光电稳瞄系统内框架进行了模型简化及模型修正方法的研究,以提高计算的精度和效率。利用动力子结构法简化模型,单次模态求解时间缩短95%以上。选取了具有全局寻优能力的多种群退火遗传算法进行模型修正,得到了内框架轴承部分的六向刚度值,通过相关性分析得到能和实验结果匹配较好的有限元模型,各阶模态相关性在0.8以上,频率差从最大25.15%下降到9.05%;此外,通过补充实验验证了模型是准确和可靠的。结果证明,本文所述模型修正方案高效可行,可用于指导实际工程的精确设计。
[1] 甘至宏,张葆,撖芃芃.机载光电稳定平台框架结构工程分析[J].光学精密工程,2008,16(12):2442-2446.
[2] 张保强,陈国平,郭勤涛.基于模态频率和有效模态质量的有限元模型修正[J].振动与冲击,2012,31(24):70-73.
[3] 闫桂荣,段忠东,欧进萍.遗传算法在结构有限元模型修正中的应用[J].哈尔滨工业大学学报,2007,39(2):182-186.
[4] 王明超,杨光,张卫国,等.基于动力学模型修正的螺纹连接结构建模[J].振动与冲击,2015,34(23):162-165.
[5] 吴玉厚,饶良武,赵德宏,等.陶瓷球轴承电主轴的模态分析及其振动响应试验[J].机械设计与制造,2011(12):219-221.
[6] 王建宏,王道波.飞机颤振模态参数的偏差补偿辅助变量辨识[J].电光与控制,2011,18(12):71-74.
[7] YUEN K V,KATAFYGIOTIS L S.BAYSIAN modal updating using complete input and incomplete response noisy measurements[J].Journal of Engineering Mechanics, 2002,128(3):340-350.
[8] ERSOY K,ATASOY M,GENÇ C.Modal updating of tail of a military helicopter[J].Conference Proceedings of the Society for Experimental Mechanics Series,2016(9):133-144.
[9] 魏锦辉,任伟新,万华平.基于模态柔度的有限元模型修正方法[J].振动与冲击,2013,32(13):107-111.
[10] 李伟明,洪嘉振.基于频响函数的模型修正方法[J].上海交通大学学报,2011,45(10):1455-1459.
[11] 杨启志,郭林强,宋俊朋,等.车辆并联多维减振座椅的模态分析[J].机械科学与技术,2016,35(9):1432-1438.
[12] 李克雷,谢振宇.基于ANSYS的磁悬浮转子的模态分析[J].机电工程,2008,25(1):1-3.
[13] BUFFE F,ROY N,COGAN S.Modal identification and model updating of pleiades[J].Conference Proceedings of the Society for Experimental Mechanics Series,2011(1):131-143.
[14] 董威利.月球探测器软着陆动力学分析及动态子结构技术研究[D].北京:北京理工大学,2015.
ADynamicModelUpdatingMethodofInnerGimbalofElectro-OpticalStabilizedSightingSystem
LI Shi-yao, ZHANG Wei-guo, HOU Jun-zhan, WANG Ming-chao, WANG Tan
(Xi’an Institute of Applied Optics,Xi’an 710065,China)
In order to improve the accuracy of the structural dynamic model of the inner gimbal of the electro-optical stabilized sighting system,and to improve the efficiency of the simulation analysis,a structural dynamic model updating method based on the multi-population genetic annealing algorithm was proposed.Taking the inner gimbal of an electro-optical stabilized sighting system as the object of study,we built the Finite Element Model (FEM) by using the dynamic substructure technique.Based on the modal test results,the FEM was updated by using the multi-population genetic annealing algorithm and the correlation analysis to obtain the six-dimensional stiffness value of the inner gimbal bearing in global optimization.An additional experiment was carried out to test the reliability of the updated FEM.The experiment result showed that FEM and the test result were well-matched,the correlation between the modals was over 0.8,the frequency error was below 9.05%,and the calculating efficiency was increased by 95%.Thus an effective and feasible model updating method was obtained,which is an important reference to the structure design of the inner gimbal of the electro-optical stabilized sighting system.
electro-optical stabilized sighting system; inner gimbal; dynamic substructure; genetic annealing algorithm; model updating
李世尧,张卫国,侯军占,等.光电稳瞄系统内框架动力学模型修正方法研究[J].电光与控制,2017,24 ( 11 ) : 83-87,99.LI S Y,ZHANG W G,HOU J Z,et al.A dynamic model updating method of inner gimbal of electro-optical stabilized sighting system[J].Electronics Optics & Control,2017,24( 11) : 83-87,99.
2016-12-30
2017-01-19
国防基础科研计划资助(A0920132001);“十二五”兵器预研支撑基金项目(62201070139);高等院校协同创新合作专项项目(KH201504)
李世尧(1991 —),男,四川广元人,硕士,助工,研究方向为光电系统结构设计。
TP203
A
10.3969/j.issn.1671-637X.2017.11.017
猜你喜欢
力学与实践(2022年5期)2022-10-21
兰州交通大学学报(2022年2期)2022-04-26
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
科技信息·学术版(2021年18期)2021-10-25
法律方法(2019年4期)2019-11-16
特种结构(2019年2期)2019-08-19
摄影之友(影像视觉)(2017年1期)2017-07-18
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
小型内燃机与车辆技术(2015年4期)2015-10-22
