基于幅度、相位补偿的数据级多阵联合检测方法研究
2018-01-22 03:38龚轶祝献杜栓平
声学与电子工程 2017年4期
龚轶 祝献 杜栓平
(第七一五研究所,杭州,310023)
多基阵联合检测是通过将来自于不同声呐基阵的数据进行综合处理,从而提高对目标的检测能力,是一种数据融合处理方法。多基阵联合检测根据数据信息类型不同,一般可以分为:分布式联合检测和集中式联合检测两种方式。分布式联合检测是特征信息级融合处理,将各声呐的检测结果进行融合处理,形成更准确地检测判决;集中式联合检测是数据级融合处理,直接利用各声呐基阵的观测数据进行假设检验,并形成最终的判决。相比较于分布式联合检测,集中式联合检测优点是利用了多部声呐基阵的所有观测信息,因此可以获得较好的检测性能,缺点是对每部声呐基阵布置空间坐标、接收阵元幅相一致性、数据处理能力以及声基阵观测数据在采集同步性、传输实时性等方面要求更高。本文主要研究集中式融合方式下的多基阵联合检测。
1 检测策略
水面舰船平台声呐系统一般配置有艏端阵和拖曳线列阵声呐,水下潜艇平台声呐系统一般配置有艏端阵、舷侧阵和拖曳线列阵声呐。以潜艇平台为例,艏端阵声呐是布置在潜艇艏部的声呐导流罩内,后部配备有隔声障板,覆盖的频段较宽,其接收阵工作频带为中高频;舷侧阵声呐则是布置在艇体左右两舷侧,相比较于艏端阵,其孔径更大,可达数十米,工作频段一般处于中低频;拖曳线列阵声呐则是潜艇通过拖缆将水听器阵列拖于艇艉后部的声呐基阵,其孔径可不受艇体的限制,相较于艏端阵和舷侧阵其阵孔径更大,可达数百米之长,其工作在低频段。因此,潜艇上完成目标探测功能的三部主要声呐基阵的工作频段并不一致,有些频段是单基阵独有的,有些频段则是多基阵共有的。
对于多基阵数据级联合检测,在多基阵阵元域数据进行联合波束形成时,必须保证多阵数据是属于同一频段内,所以多基阵数据级联合检测需要采用分频段来进行处理的策略。图1和图2分别给出两阵和三阵工作频段分布图,以及分频段多基阵处理策略的示意图。图1中:①为阵1处理频段范围;②是阵1和阵2共有处理频段范围;③为阵2处理频段范围。图2中:①表示阵1处理频段范围;②是阵1和阵2共有处理频段范围;③为阵1、阵2和阵3共有处理频段范围;④是阵2和阵3共有处理频段范围;⑤为阵3单独处理频段范围。
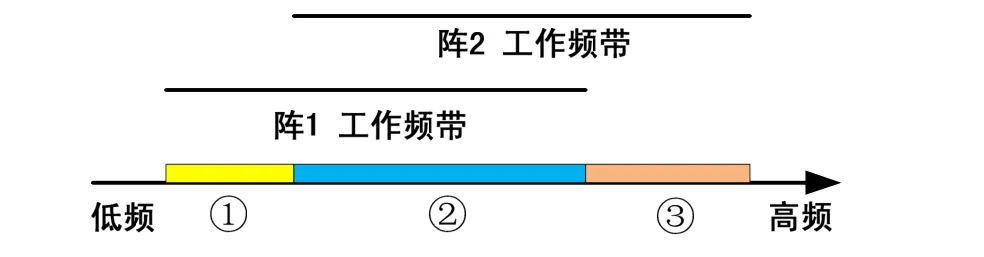
图1 两阵工作频段分布图
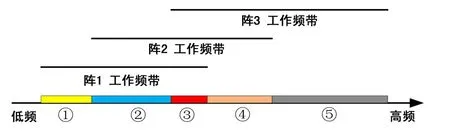
图2 三阵工作频段分布图
2 数学建模
假设目标辐射源噪声S(f)是一宽带信号,经海洋波导传播G(f,r)、声呐背景噪声N(f)和声呐基阵各阵元响应A的作用,可以得到声呐基阵的接收数据为:

其中X(f)=[X1(f),X2(f),…XM(f)]T表示为声呐基阵中M元阵元的频域输出信号向量;为各阵元相对于参考阵元的复加权矩阵,用以表征不同阵元之间的幅度、相位不一致性,其中ai为幅度加权值,ejiψ为相位加权值,i=1,2,3…M;G(f,r)=[G(f,r1),G(f,r2),…,G(f,rM)]为目标源信号经海洋波导传递至各阵元的传递函数向量;N(f)=[N1(f),N2(f),…,NM(f)]T为噪声向量。
下面我们考虑两条线阵在共有处理频段范围内进行联合波束形成的情况。设第一基阵阵元数为M1元,阵元间距为d1,第二基阵为M2元,阵元间距为d2,两阵间隔为D,布阵形式如图3所示。
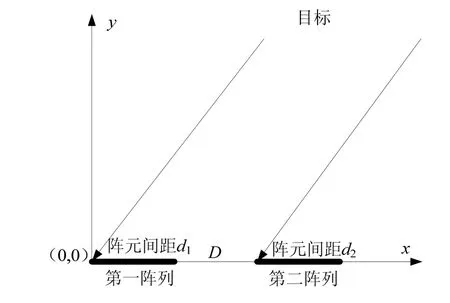
图3 两线阵与目标位置分布示意图
3 仿真分析
下面主要从幅度不一致性和相位不一致性上对多基阵数据级联合检测性能进行仿真分析。
3.1 幅度不一致性
幅度不一致性主要是由于不同基阵阵元之间在相同频段的幅度响应和前置放大器的放大系数不相同造成的。假设各基阵阵元初始相位具有一致性,则复加权矩阵设置A1=diag[a1,a1,…,a1],A2=diag[a2,a2,…,a2],a1、a2均为一常数。
幅度不一致性使得两阵数据在联合波束形成中的影响比重发生变化。幅度响应更大的,对联合波束形成的结果产生更大影响。
仿真参数:阵1阵元间距为0.6 m,阵元数为64元,幅度响应设置为1;阵2阵元间距为1 m,阵元数为64元,幅度响应由0.02变化到50,两阵之间间距为10 m。仿真图如图4所示。从图中可以看出,当第二阵列幅度响应相比较于第一阵列很小时,两阵联合阵增益与第一阵列阵增益相近;当第二阵列幅度响应与第一阵列相差不大时,两阵联合阵增益快速增大,两阵幅度响应一致时,联合阵增益最大;当第二阵列幅度响应相比较于第一阵列很大时,两阵联合阵增益下降,与第二阵列阵增益相近。

图4 幅度不一致性对阵增益的影响
3.2 相位不一致性
由于制作工艺及预处理电路上的差异,不同接收基阵阵元间的附加相移(初始相位差)不可避免地存在,使得各基阵阵元间接收信号的相位差由声程差引起的相位差和附加相移值两部分构成。声程差所引起的相位差通常是使用波束形成方法来进行相位补偿,即对预定方向上的入射信号进行同相叠加,从而使得在该方向上的波束输出最大,即判定为信号入射方向,而附加相移的存在将直接影响到波束形成的效果,使得检测性能下降。
假设两个基阵各阵元之间的幅度响应具有一致 性 , 则 可 以 得 到A1=diag[ejΨ1,ejΨ1,…,ejΨ1],A2=diag[ejΨ2,ejΨ2,…,ejΨ2],Ψ1、Ψ2均为一常数。
仿真参数:阵1阵元间距为0.6 m,阵元数为64元,初始相位为0;阵2阵元间距为1 m,阵元数为64元,初始相位从0变化到2π,两阵之间间距为10 m。仿真图如图5所示。
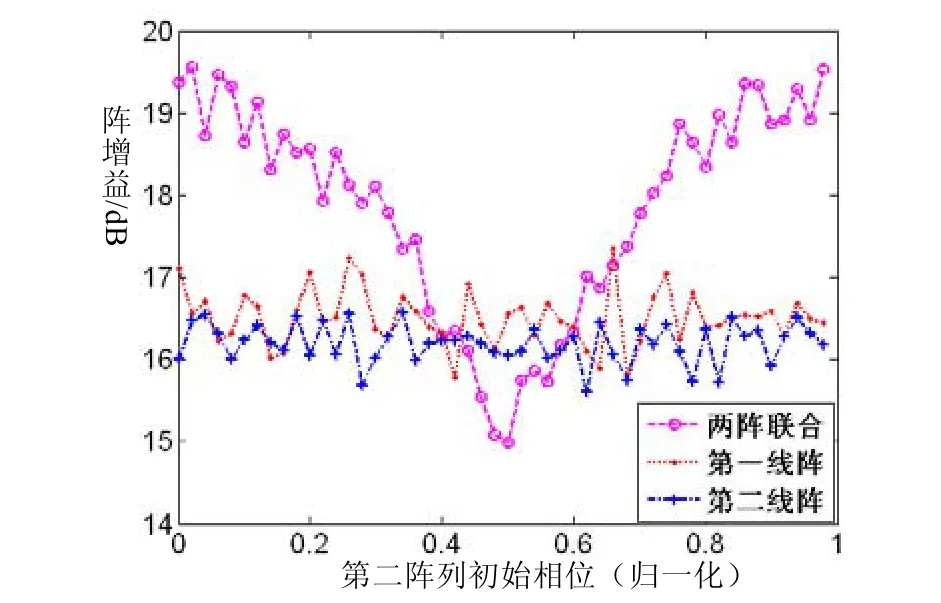
图5 相位不一致对阵增益的影响
从图 5中可以看出,在 0~π范围内时,初始相位差越大,对性能的影响越大;而且在π~2π范围内时,初始相位差越大,对性能的影响越小,这是因为两基阵初始相位差越接近π,则两基阵初始相位相反,对联合波束性能影响最大。
从上面的分析可知,在进行多基阵数据级联合检测时,不同基阵的初始相位不一致性对联合波束形成的影响很大,所以在进行数据级融合处理之前,应该进行基阵的初始相位补偿,使得多阵阵元间相位具有一致性。
4 实验数据分析
本节采用位于舟山海域的一次海试数据进行多基阵联合检测性能分析。接收阵为一条低频线阵和一条中高频线阵。在两线阵间距为10 m的情况下,分别采用较多阵元数和较少阵元数进行两阵联合波束形成与各单阵波束形成,对比图如图6所示。图6(a)为低频阵8元、中高频阵8元的波束形成对比图,图6(b)为低频阵32元、中高频阵32元的波束形成对比图。
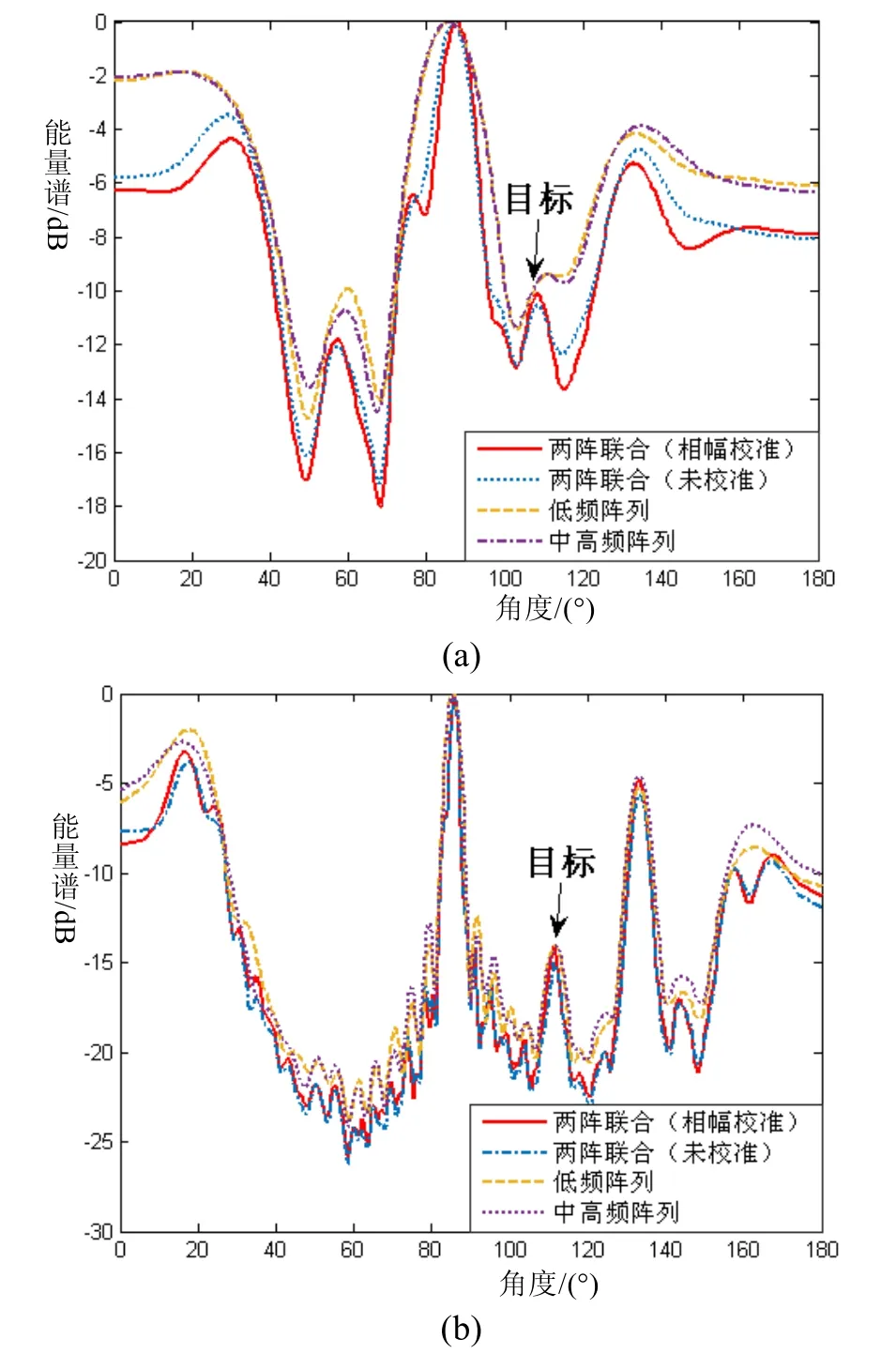
图6 波束输出对比图
从图6中可以看出,在阵元数较少的情况下,单基阵对合作目标进行探测时,已很难分辨目标,而两阵进行联合处理之后,其阵孔径相比较于单基阵增大,已能分辨目标方位,对目标的检测效果更好。因实际数据无法得知阵的输入信噪比,阵增益值无法估计,这里用估计的输出信噪比来代替阵增益进行性能比较。

表1 较少阵元数-输出信噪比对比表
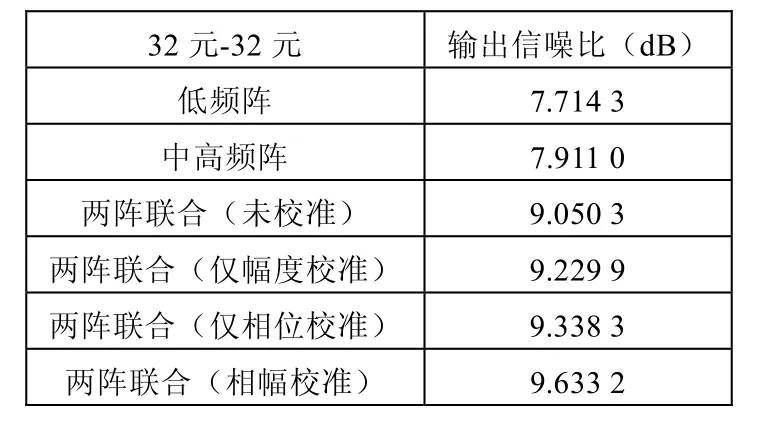
表2 较多阵元数-输出信噪比对比表
实验数据分析得出,两阵联合输出信噪比相较于单阵得到提高,并且在经幅度、相位补偿后,两阵联合输出信噪比得到进一步提高,对目标的检测性能提升。
5 结论
采用分频段处理解决了平台声呐系统多基阵工作频带不一致的问题,导出两基阵在阵元复加权不同、布阵间距不同和阵元数差异的情况下进行联合波束形成时的波束输出数学表达式。针对于影响多基阵联合检测性能的因素-幅度不一致和相位不一致,采用仿真和实际数据进行验证,得出:①一般情况下,多基阵联合检测性能相较于单基阵更好;②两阵幅度、相位不一致性对联合波束输出会产生影响,使得两阵联合空间输出增益降低,所以在进行联合处理之前,必须对两阵进行幅度和初始相位的补偿。
[1]HARRY L VAN TREES. 最优阵列处理技术[M]. 汤俊,译. 北京: 清华大学出版社, 2008.
[2]赵辉, 王昌明. 阵元信号相幅非一致性对波束形成的影响[J]. 测试技术学报,2007,21(2):144-148.
[3]田坦. 声呐技术[M].2版. 哈尔滨: 哈尔滨工程大学出版社, 2010.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
股市动态分析(2021年25期)2021-12-30
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
水下无人系统学报(2018年5期)2018-11-09
宇航计测技术(2018年3期)2018-09-08
声学与电子工程(2017年1期)2017-06-22
制造业自动化(2017年2期)2017-03-20
西北工业大学学报(2015年3期)2015-12-14
声学技术(2015年1期)2015-09-07