基于改进航向估计的行人航迹推算研究*
2018-01-24 07:53樊启高孙璧文庄祥鹏
传感器与微系统 2018年1期
孙 艳, 樊启高, 孙璧文, 庄祥鹏
(江南大学 物联网工程学院,江苏 无锡 214122)
0 引 言
随着室内定位系统的快速发展,越来越多的技术开始兴起。如WiFi技术[1],射频识别(radio frequency identification,RFID)技术[2,3]、超声波技术[4]、ZigBee技术[5,6]。但无线传输不能保证在所有条件下的定位的稳定性和准确性。因此,基于微机电惯性测量单元(micro-electro-mecha-nical system inertial measurement unit,MEMS IMU)[7]的行人室内定位技术(pedestrian dead reckoning,PDR)[8]兴起。PDR具有计算简便,成本低,发展空间大等特点。
PDR算法大多基于零速更新(zero velocity update,ZUPT)[9]建立不同的惯性导航系统,得到定位信息。但基于ZUPT的定位算法存在缺点:零速点未被完全提取,MEMS IMU的累积误差导致判断零速区间错误等。因此,本文提出了基于改进航向估计的行人航迹算法,利用步频、步长和航向计算出行人的位置,其中航向估计采用了基于四元数算法,并采用扩展卡尔曼滤波[10](extended Kalman filtering,EKF)对航向角的偏差进行修正,提高了定位的精度。
1 行人航迹推算
行人航迹推算由步频估计、步长估计以及航向估计组成。如图1所示,通过加速度计的输出值计算出步长以及估算出行走的步数。航向估计则通过加速度计、陀螺仪和磁强计的输出值计算得到,并利用EKF实时修正航向角的偏差,得到精确的航向角,提高了行人定位的精度。行人定位公式如下
(1)
(2)
式中ei与ni分别为行人东向和北向的步长;Ψk为每一步东向和北向的夹角;k为行走的步数。
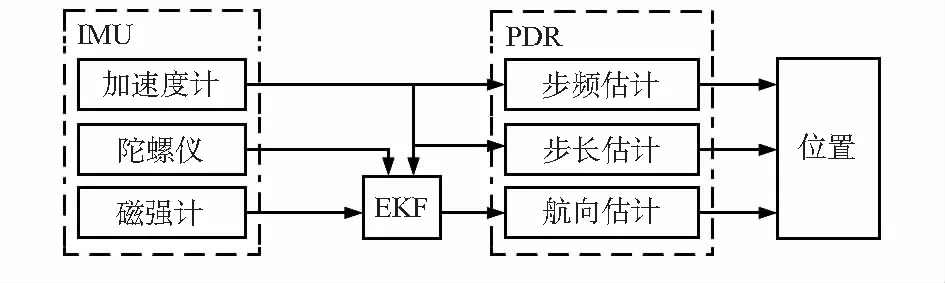
图1 行人航迹推算的结构框图
1.1 步频估计
步频估计算法包括峰值检测法[11]、站立测频法[12]、零点交叉法[13,14]等。本文采用刘程的自适应计步检测算法[15],利用加速度输出的Z向峰值来临时间不同,采用自适应时间窗的检测算法。
1.2 步幅估计
步幅估计算法通常有2种:1)根据经验,设定行人的步幅为固定值,这种做法会存在很大的累积误差;2)对行人的步幅进行动态的计算,本文利用加速度计输的峰值进行计算。公式如下
(3)
式中az max为在本时段加速度计的最高值;az min为本时段的加速度计的最低值;Lk为根据行人的行走特征所设定的固定值。
1.3 航向估计
航向估计为本文提出的行人航迹算法中是最重要的步骤,对行人的定位有重要的影响。首先,俯仰角θ和横滚角φ可以通过加速度计得到[16]
(4)
(5)
(6)

(7)
(8)
式中ax,ay,az为加速度计X,Y,Z轴的输出值,gn为重力加速度;θ为俯仰角;φ为横滚角;ψ为航向角;hx,hy,hz分别为磁强计X,Y,Z轴的输出值;δD为本地的磁偏角。
2 EKF
通过加速度计和磁强计计算的俯仰角、横滚角、航向角存在着累积误差,影响行人定位的精确性,因此,利用EKF修正航向角的偏差。
基于四元数的姿态矩阵
(9)
(10)
四元数更新公式
(11)
(12)
式中q=[q0q1q2q3];wx,wy,wz分别为陀螺仪X,Y,Z轴的输出值;dt为采样时间。
卡尔曼滤波的状态值X=[q0q1q2q3]T;量测值Z=[θφψ]T;根据文献[10]可得状态矩阵
(13)
量测矩阵
(14)
系统干扰方差矩阵为
(15)

量测噪声方差矩阵为
(16)

3 实 验
为评估提出算法的定位效果,需采用惯性航姿系统Xsens Mti300进行相关实验,如图2所示为IMU硬件整体结构以及安装方式。陀螺仪、加速度计、磁强计、温度传感器和气压传感器等作为从设备挂载内部集成电路(inter-integrated circuit,I2C)总线,再通过数字信号处理器(digital signal processor,DSP)将数据从串口中输出到计算机上,得到方向、加速度以及转速。

图2 IMU结构及安装方式
图3为滤波前、后的航向角与真实航向角的对比,实验结果表明:航向角动态误差为-120.012°~149.0313°,但平均误差仅3.5699×10-6(°),说明有极少个数据误差特别大,其他的则较小,残差率为0.0041,置信度为99.59%,因此,航向角的精度满足行人定位的需求。

图3 航向角对比
图4为轨迹对比,实验表明:误差范围为-0.3059~0.2415m,残差率为0.0172,置信度为98.28%,本文提出的行人定位算法具有准确性和稳定性。

图4 行人轨迹对比
4 结 论
通过IMU的陀螺仪、加速度计和磁强计的输出值,得到步长、步数。基于四元数法计算航向角,并采用EKF修正航向角的偏差提高航向角精度。实验结果表明:航向角的置信度为99.59%,定位轨迹动态误差为-0.3059~0.2415m,置信度为98.28% ,满足实际系统的要求。未来的工作,需要在更加复杂的环境下进行实验,并对滤波算法进一步改进,构建紧耦合模型,提高定位精度。
[1] Ma R,Guo Q,Hu C,et al.An improved WiFi indoor positioning algorithm by weighted fusion[J].Sensors,2015,15(9):21824-21843.
[2] 王小辉,汪云甲,张 伟.基于RFID的室内定位技术评述[J].传感器与微系统,2009,28(2):1-3.
[3] 郝金平,张建寄.超高频RFID发卡机射频匹配网络研究[J].自动化技术与应用,2016,35(5):59-63.
[4] Hazas M,Hopper A.Broadband ultrasonic location systems for improved indoor positioning[J].IEEE Transactions on Mobile Computing,2006,5(5):536-547.
[5] 王 静,张会清.基于ZigBee的无线网络定位技术的研究与实现[J].传感器与微系统,2010,29(2):13-15.
[6] 罗 欢,张 健,席文平.基于ZigBee技术的足球机器人通信系统设计[J].无线电工程,2015,45(5):16-19.
[7] 钱伟行,朱欣华,苏 岩.基于足部微惯性/地磁测量组件的个人导航方法[J].中国惯性技术学报,2012,20(5):567-572.
[8] 殷 红.基于foot-mounted的IMU室内行人航迹推算研究[D].南昌:南昌大学,2013.
[9] Lin T,Li L,Lachapelle G.Multiple sensors integration for pedestrian indoor navigation[C]∥2015International Conference on Indoor Positioning and Indoor Navigation(IPIN),IEEE,2015:1-9.
[10] 赵 斌,窦灵平,袁立军.卡尔曼滤波算法的硬件实现研究[J].无线电工程,2016,46(6):65-68.
[11] 刘 程,阳 洪.自适应计步检测算法研究[J].压电与声光,2015,37(2):258-261.
[12] Levi R W,Judd T.Dead reckoning navigational system using accelerometer to measure foot impacts:US,US5583776[P].1999—12—06.
[13] Yan L,Wang J J.A robust pedestrian navigation algorithm with low cost IMU[C]∥2012IEEE International Conference on Indoor Positioning and Indoor Navigation(IPIN),Sydney,NSW,2012:1-7.
[14] 陈 伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术大学,2010.
[15] Pratama A R,Wan W,Hidayat R.Smartphonebased pedestrian dead reckoning as an indoor positioning system[C]∥IEEE International Conference on System Engineering and Technology,Bandung,2012:1-6.
[16] 贾瑞才.基于四元数EKF的低成本MEMS姿态估计算法[J].传感技术学报,2014,27(1):90-95.
猜你喜欢
西北工业大学学报(2022年2期)2022-05-11
空间科学学报(2020年4期)2020-04-22
燕山大学学报(2020年1期)2020-03-12
体育世界(学术版)(2019年5期)2019-07-11
中国体育教练员(2019年1期)2019-04-18
体育科技文献通报(2019年2期)2019-02-14
体育科技(2018年4期)2018-12-04
传感器与微系统(2018年7期)2018-08-29
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07