
旱地小麦全膜覆土穴播联合机覆土作业性能试验
2018-01-31 00:53赵武云马明义王久鑫马军民
干旱地区农业研究 2017年6期
戴 飞,赵武云,张 华,马明义,王久鑫,马军民
(1.甘肃农业大学机电工程学院, 甘肃 兰州 730070; 2.甘肃洮河拖拉机制造有限公司, 甘肃 定西 730500)
旱地小麦全膜覆土穴播技术是近年来我国西北地区旱作农业上发展的一项创新技术,其集覆盖抑蒸、膜面种穴集雨、留膜免耕多茬种植等技术于一体,能够有效解决旱地小麦等密植作物生长期缺水和产量低而不稳的问题,且显著的增产效应使其成为西北地区“旱作农业发展的里程碑”[1-3],2014年甘肃省全膜覆土穴播小麦推广面积达到13.3×104hm2[3]。旱地小麦全膜覆土穴播技术作为针对我国西北旱农区兴起的一种新型农作制栽培模式,国内外对其配套的农机装备研发还没有进行深入研究,为此,自行研制了旱地小麦全膜覆土穴播联合机,该机可一次性完成旋耕、镇压、铺膜、覆土、播种等工序[4]。
覆土、播种作业质量是影响旱地小麦全膜覆土穴播技术农艺效应的关键因素,可为发挥小麦全膜覆土穴播技术优势提供保障。当膜顶覆土量过少时,小麦穴播种床不牢固,覆盖地膜容易被风掀起,其功用无法很好实现;若覆土量过大,种子拱土相对困难,影响小麦出苗及后期的生长与产量效应[5]。相关旱地小麦全膜覆土穴播技术规程研究及试验表明,当膜上土壤覆盖厚度控制在10 mm左右时,有助于小麦种子萌发及对土壤水分、肥料高效利用[1-2,6]。因此,联合机只有在保证全膜覆土种床作业质量的基础上才能提高其播种性能。为进一步研究旱地小麦全膜覆土穴播联合机高效覆土作业性能,以该机覆土机构相关工作参数作为自变量,通过试验测得不同因素水平组合条件下的覆土合格率(参考已有技术规程研究,本试验以膜上覆土厚度8 mm~12 mm为合格[7]),采用响应面分析法确定各因素及其交互作用对平均覆土合格率的影响并获取最优控制变量组合,以达到最佳全膜覆土、穴播一体化作业效果。
1 工作过程分析与关键参数选取
1.1 结构组成
旱地小麦全膜覆土穴播联合作业机主要由旋耕装置、镇压装置、膜上覆土装置、覆膜机构、清土装置及播种装置等部件组成,联合机结构如图1a、b所示。

注:1.旋耕刀组;2.机架;3.右传动轴;4.链传动I;5.镇压辊;6.挂膜架;7.穴播器;8.清土装置;9.刮板式土壤升运器;10.覆土壳体;11.变速箱;12.左传动轴;13.链传动Ⅱ;14.仿形机构;15.展膜辊
Note: 1. Rotary knife set; 2.Rack; 3.Right transmission shaft; 4.Chain drive I; 5.Press roller; 6.Hang film frame; 7.Dibble planting device; 8.Clean soil device; 9.Scraper soil elevating mechanism; 10.Covering soil shell; 11.Gear-box; 12.Left transmission shaft; 13.Chain drive Ⅱ; 14.Feeler mechanism; 15.Unfold film roll
图1旱地小麦全膜覆土穴播联合机结构图
Fig.1 Structure diagram of soil mulching on plastic-film and dibble machine for dry-land wheat
联合机膜上覆土装置主要由刮板式土壤升运器、覆土壳体等组成;刮板式土壤升运器主要由升运带、物料刮板及传动装置等部件组成。其中,升运带宽度为1 200 mm,物料刮板高度为40 mm,刮板通过螺钉与升运带连接并沿升运带幅宽均布,物料刮板间距为100 mm。覆膜机构主要包括挂膜架与展膜辊;播种装置主要由仿形机构、后置穴播器及其清土装置组成。
1.2 传动方案与作业原理
如图2所示,联合机挂接的拖拉机通过万向节将动力传递至变速箱,变速箱经左、右传动轴分别将动力传递至旋耕刀组与刮板式土壤升运器,后置镇压辊、挂膜架、展膜辊及穴播器则随着联合机牵引前行转动作业。

注:1.万向节;2.旋耕刀组;3.右传动轴;4.链传动Ⅰ;5.链传动Ⅱ;6.穴播器;7.展膜辊;8.挂膜架;9.镇压辊;10.刮板式土壤升运器;11.变速箱;12.左传动轴;13.链传动Ⅲ
Note: 1.Cardan joint; 2.Rotary knife set; 3.Right transmission shaft; 4.Chain drive Ⅰ; 5.Chain drive Ⅱ; 6.Dibble planting device; 7.Unfold film roll; 8.Hang film frame; 9.Press roller; 10.Scraper soil elevating mechanism; 11.Gear-box; 12.Left transmission shaft; 13. Chain drive Ⅲ
图2传动系统示意图
Fig.2 Schematic diagram of transmission system
旱地小麦全膜覆土穴播联合机作业时,其旋耕刀组快速旋转将田间土壤切削、疏松,并高速抛掷至刮板式升运器表面;此时,刮板式土壤升运器顺时针运转,将田间土壤倾斜提升越过镇压、覆膜机构,待位于刮板式土壤升运器下方的相关机构完成镇压及覆膜作业后,将输送土壤均匀铺洒到地膜上。与此同时,轮式穴播器随着联合机的牵引转动作业,并在仿形机构、清土装置的配合作用下完成全膜覆土小麦播种作业。
1.3 工作参数分析与选取
通过对旱地小麦全膜覆土穴播联合机的研发与改进,其播种装置作业性能相对稳定,但由于覆土过程中相关作业参数不匹配引起地膜覆土厚度不一致,且进一步影响后续播种质量,仍然是制约联合机工作性能优劣的最核心问题[6]。
旱地小麦全膜覆土种床的耕整、铺设是在联合机田间工作前进过程中由旋耕刀组作用获取覆膜土壤,并随刮板式土壤升运器倾斜提升、输送至覆膜膜顶。因此,除地膜质量的优劣外,作业机前进速度v1、刮板式土壤升运器线速度v2(图3)、旋耕刀组转速n1、刮板式土壤升运器倾角α(图3)均对联合机覆土作业性能有一定制约与影响[8]。其中,为降低联合机功耗,防止旋耕刀轴变形与刀片断裂,旋耕刀组转速n1在满足对土壤切削、抛送的前提下不宜频繁变化调整,根据相关研究试验时控制在220 r·min-1[9]。

注:1.传动链;2.从动链轮;3.传动轴承;4.传动轴;5.主动链轮;6.升运带;7.物料刮板
Note: 1.Drive chain; 2.Driven sprocket; 3.Drive bearing; 4.Transmission shaft; 5.Drive sprocket; 6.Elevator belt; 7.Material scraper
图3刮板式土壤升运器结构图
Fig.3 Structure diagram of scraper soil elevating mechanism
2 试验材料与方法
2.1 试验材料
旱地小麦全膜覆土穴播联合机覆土作业性能试验在临洮县洮阳镇进行,试验地面积约为0.40 hm2,所处地势平坦,土壤为黄绵土,土壤含水率为14.6%~15.9%。试验依照旱地小麦全膜覆土穴播相关农艺要求,通过变换、调整联合机不同前进速度、刮板式土壤升运器线速度及其倾角进行膜顶覆土作业,选用地膜为厚度为0.01 mm的白色地膜。
2.2 试验方法
参照NY/T 986-2006《铺膜机作业质量》标准试验方法,测定计算旱地小麦全膜覆土穴播联合机田间作业后的平均覆土合格率[5,10]。以地膜幅宽1.2 m×1.0 m(测区长度)的面积为1个试验测定小区,每个测区随机抽取20个样点应用钢卷尺对覆土厚度进行测量(其中,覆土厚度在8~12 mm,表明联合机覆土作业性能符合相关农艺技术要求,覆土质量合格[1-2,6-7]),试验以6个作业小区的测定平均值为测试结果。平均覆土合格率计算式为:
(1)
(2)
式中,σc为测区平均覆土合格率,%;σi为单个测区覆土合格率,%;Bj为单个测区内覆土厚度在8~12 mm的测试点数量;j为单个测区抽取样点数量,取20;i为测区数量,取6。
2.3 响应曲面法试验方案
综合上述联合机工作参数分析与选取,应用Design-Expert 8.050软件,采用Box-Behnken试验设计原理[11],以作业机前进速度(x1)、刮板式土壤升运器线速度(x2)和刮板式土壤升运器倾角(x3)为自变量,平均覆土合格率(σc)为响应值,各试验因素水平编码如表1所示,共实施17组响应面分析试验(表2)。

表1 因素水平编码
3 试验结果与分析
3.1 回归模型的建立及检验
试验结果如表2所示,旱地小麦全膜覆土穴播联合机作业后平均覆土合格率为79.7%~96.5%,基本满足相关农艺技术要求。

表2 响应面分析结果
借助Design-Expert 8.050软件对所得试验结果进行分析,获得编码值表示的平均覆土合格率σc的二次回归模型为:

(3)
式中,σc为平均覆土合格率,%;X1为作业机前进速度的编码值;X2为刮板式土壤升运器线速度的编码值;X3为刮板式土壤升运器倾角的编码值。
对上述二次回归模型进行方差分析和回归系数显著性检验,结果如表3所示。
由表3可知,回归模型P<0.0001,表明获得的回归模型极其显著;失拟项P>0.05,失拟不显著,说明模型所拟合的二次回归方程与实际相符合,能正确反映平均覆土合格率σc与X1、X2和X3之间的关系,回归模型可以较好地对优化试验中各种试验结果进行预测。其中模型的一次项X1(作业机前进速度)影响极显著,X3(刮板式土壤升运器倾角)影响显著,而X2(刮板式土壤升运器线速度)影响不显著;模型的二次项X12、X22、X32影响均极显著;交互项X1X3、X2X3影响极显著,X1X2影响显著。根据模型各因素回归系数的大小,可得到各因素的影响主次顺序为:X1、X3、X2,即作业机前进速度、刮板式土壤升运器倾角、刮板式土壤升运器线速度。
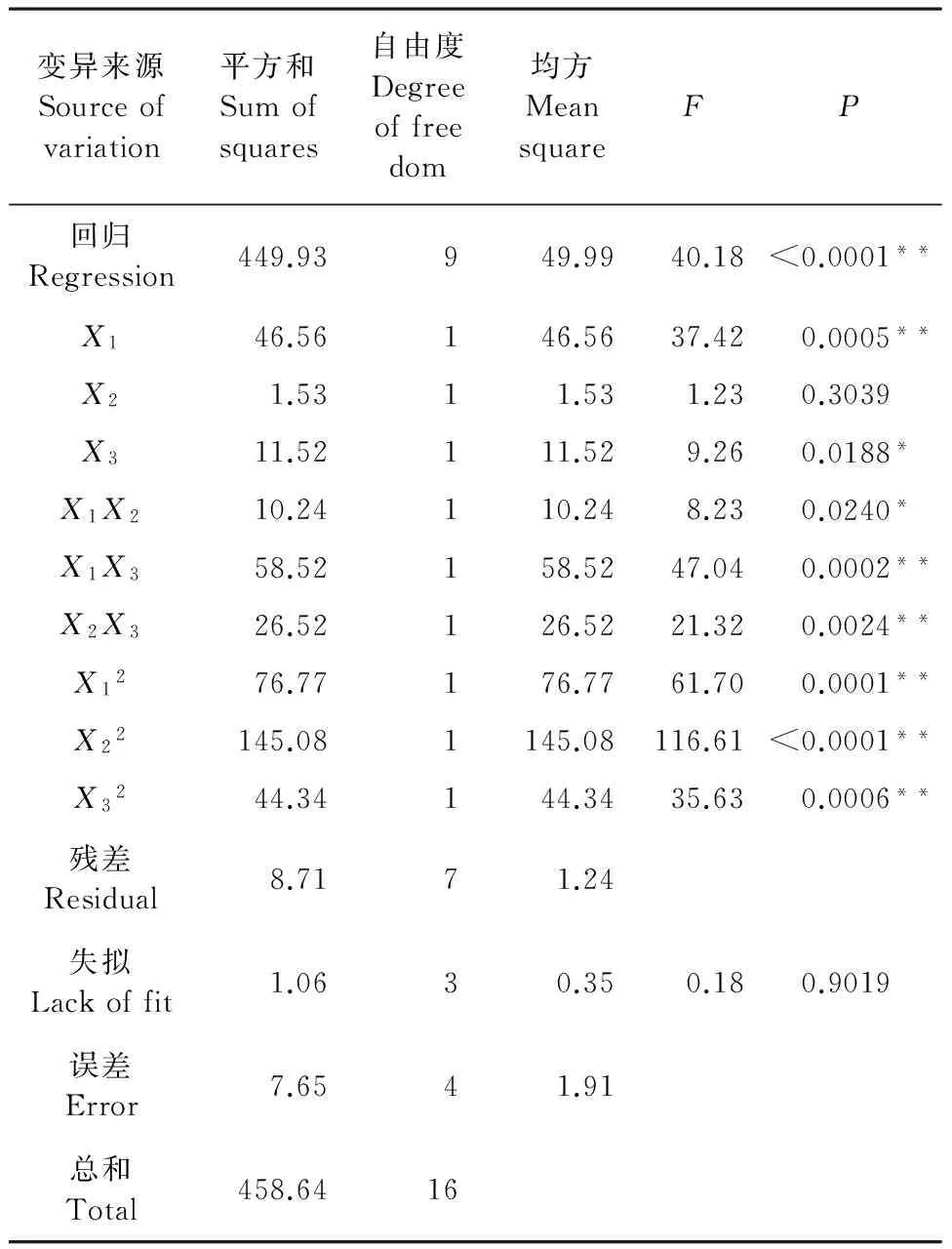
表3 回归方程方差分析
注:*显著(P<0.05),**极显著(P<0.01)。
Note: * mean significant (P<0.05), ** mean highly significant(P<0.01).
3.2 模型交互项的解析
根据回归模型(3)作出各因素之间关系的响应面图。响应曲面的形状能够反映出交互因素作用的强弱,椭圆形表示两因素交互作用显著,而圆形则相反[12-13]。
由图4响应曲面形状可以看出,作业机前进速度与刮板式土壤升运器线速度交互作用对平均覆土合格率的影响显著。当作业机前进速度固定在某一水平,刮板式土壤升运器线速度由0.5 m·s-1向1.5 m·s-1不断递增变化时,平均覆土合格率呈现出先增大、后减小的变化趋势。这主要是由于当旋耕刀组高速切削土壤并抛掷至线速度适宜的刮板式土壤升运器后,其能够将充足的土壤准确铺撒至覆盖地膜表面,覆土厚度合格。但同时随着刮板式土壤升运器线速度的不断增加,使得升运器各刮板间的土壤还未充分填充就已经倾斜提升、铺撒,导致地膜表面土壤覆盖厚度达不到要求,平均覆土合格率有所降低。

图4作业机前进速度与刮板式土壤升运器线速度对平均覆土合格率的影响
Fig.4 Influence of advance velocity of machine and linear velocity of scraper soil elevating mechanism on the average percent pass of soil mulching
由偏回归分析与等高线密度可以得出,作业机前进速度对平均覆土合格率的影响大于刮板式土壤升运器线速度的影响。
由图5可知,作业机前进速度对平均覆土合格率影响较刮板式土壤升运器倾角更显著,这与方差分析结果相同。当刮板式土壤升运器倾角在某一水平,作业机前进速度由0.40 m·s-1向0.60 m·s-1不断增加时,平均覆土合格率呈现出先增大、后减小的变化趋势,且相对明显。当作业机速度较低时,刮板式土壤升运器输送的土壤在覆膜膜面上堆积滞留增加,易出现覆土厚度过大的情况;随着作业机速度不断提升,覆土厚度逐渐减小并接近相关农艺要求;当作业机速度进一步提高时,刮板式土壤升运器上的定量土壤不能够及时铺撒至对应膜面,且单位时间内的覆膜面积增加,使得部分膜面覆土厚度不够或出现地膜裸露现象(地膜表面无土壤覆盖)。
由图6可以看出,当联合机刮板式土壤升运器倾角在25°~30°之间,刮板式土壤升运器线速度为1.25~1.50 m·s-1时,平均覆土合格率出现最低值。这主要是在作业过程中刮板式土壤升运器线速度逐步增加,其上刮板间的土壤填充时间相对不足,且当其升运倾角不断变大时,部分土壤从两刮板间滑落,使得覆盖膜顶的土壤量无法满足合格覆土厚度要求。两因素对平均覆土合格率影响权重有所差异,这与方差分析结果相一致。
3.3 最优工作参数及试验验证
为保证旱地小麦全膜覆土穴播联合机田间覆土作业性能良好(即平均覆土合格率达到100%),应用软件Optimization-Numerical模块对回归方程模型(3)进行该目标下优化求解,得到旱地小麦全膜覆土穴播联合机最优工作参数为:作业机前进速度0.55 m·s-1、刮板式土壤升运器线速度1.00 m·s-1、刮板式土壤升运器倾角40°。
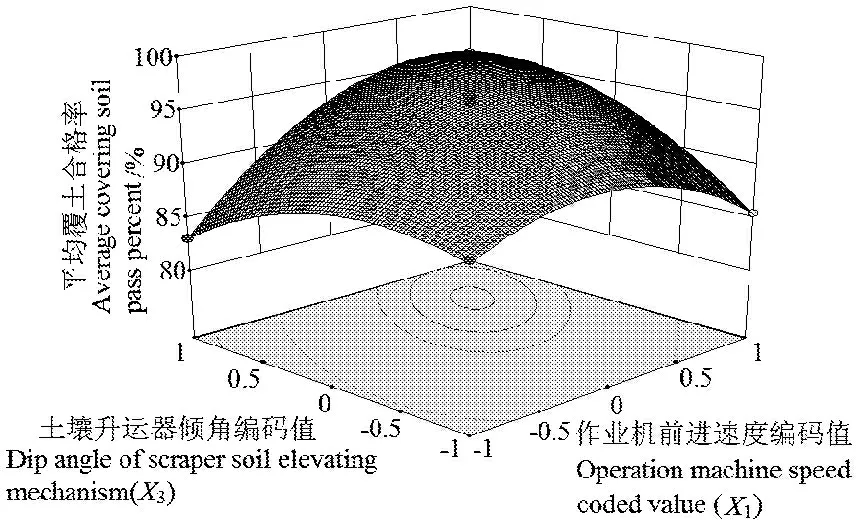

图5 作业机前进速度与刮板式土壤升运器倾角对平均覆土合格率的影响
图6刮板式土壤升运器线速度与刮板式土壤升运器倾角对平均覆土合格率的影响
Fig.6 Influence of linear velocity of scraper soil elevating and dip angle of scraper soil elevating mechanism on the average percent pass of soil mulching
为进一步验证回归模型(3)的可靠性,应用旱地小麦全膜覆土穴播联合机调整其最优工作参数进行9次田间覆土播种作业性能试验(如图7所示),试验材料与方法与文中2.1和2.2相同。
田间验证试验表明,旱地小麦全膜覆土穴播联合机平均覆土合格率为98.6%,较优化前平均覆土合格率(79.7%~96.5%)有明显的提升,表明在该优化工作参数条件下能够实现膜顶合格覆土(覆土厚度在8~12 mm之间),因此该回归模型是可靠的。
4 结 论
1) 结合Box-Behnken试验设计原理,采用三因素三水平响应面分析方法,进行旱地小麦全膜覆土穴播联合机覆土性能工作参数优化,通过试验优化结果可得影响平均覆土合格率的因素由大到小依次为:作业机前进速度、刮板式土壤升运器倾角和刮板式土壤升运器线速度。
2) 建立了平均覆土合格率与作业机前进速度、刮板式土壤升运器倾角和刮板式土壤升运器线速度的二次多项式回归模型。以全膜覆土全部达标(σc=100%)为目标,优化得到联合机最佳工作参数:作业机前进速度为0.55 m·s-1、刮板式土壤升运器线速度为1.00 m·s-1、刮板式土壤升运器倾角为40°。
3) 田间验证试验表明,联合机平均覆土合格率可达98.6%,较优化前覆土作业性能有明显的提升,达到了旱地小麦全膜覆土穴播技术关于覆膜种床顶部覆土厚度的标准要求,表明优化后的工作参数组合可以作为旱地小麦全膜覆土穴播联合机田间覆土作业的最佳依据。

图7联合机田间性能试验
Fig.7 Field performance test of combined machine
[1] 李 福,刘广才,李诚德,等.旱地小麦全膜覆土穴播技术的土壤水分效应[J].干旱地区农业研究,2013,31(4):73-78.
[2] 刘生学,张 静,刘广才,等.旱地小麦全膜覆土穴播技术高效施肥机理研究[J].干旱地区农业研究,2015,33(3):177-183.
[3] 郭振斌,刘广才,李诚德,等.旱地小麦全膜覆土穴播技术肥料效应研究[J].干旱地区农业研究,2014,32(4):163-168.
[4] 唐学鹏,赵武云,戴 飞,等.旱地小麦全膜覆土播种一体机的研制[J].干旱地区农业研究,2013,31(6):248-251.
[5] 赵立军,何 堤,周福君.2BF-1400 型水稻覆膜播种机覆土机构参数优化与试验[J].农业工程学报,2015,31(8):21-26.
[6] 史聚宝,李兴茂,孟治岳.小麦全膜覆土穴播技术存在的问题与对策[J].作物杂志,2014,(1):129-131.
[7] 李 福,刘广才,李诚德,等.甘肃省旱地小麦全膜覆土穴播栽培技术规程[J].甘肃农业科技,2012,(3):49-51.
[8] 戴 飞,赵武云,马明义,等.双垄耕作施肥喷药覆膜机工作参数优化[J].农业机械学报,2016,47(1):83-90.
[9] 贾洪雷,汲文峰,韩伟峰,等.旋耕-碎茬通用刀片结构参数优化试验[J].农业机械学报,2009,40(7):45-50.
[10] 黑龙江省农业机械运用研究所.NY/T 986-2006铺膜机作业质量[S].北京:中国标准出版社,2006.
[11] 夏连明,王相友,耿端阳.倾斜圆台型玉米精密排种器种子破损试验[J].农业机械学报,2012,43(12):67-71.
[12] 袁 雪,祁力钧,王 虎,等.温室摇摆式变量弥雾机喷雾参数响应面法优化[J].农业机械学报,2012,43(4):45-50.
[13] 易军鹏,朱文学,马海乐,等.牡丹籽油超声波辅助提取工艺的响应面法优化[J].农业机械学报,2009,40(6):103-110.
猜你喜欢
今日农业(2022年14期)2022-09-15
中国土壤与肥料(2021年5期)2021-12-02
乡村科技(2020年33期)2020-12-25
冰雪运动(2020年6期)2020-07-21
学生天地·小学低年级版(2019年10期)2019-12-30
家教世界·创新阅读(2019年11期)2019-12-10
学生天地(2019年28期)2019-08-25
冰雪运动(2019年5期)2019-08-24
作文与考试·小学低年级版(2019年7期)2019-04-17
新农业(2017年5期)2017-07-14
