基于红外定位的六自由度板球控制系统设计①
2018-02-05 07:56王正刚代广珍
佳木斯大学学报(自然科学版) 2018年1期
王正刚, 代广珍
(安徽工程大学电气工程学院,安徽 芜湖 241000)
0 引 言
板球控制系统是一种多变量的非线性控制系统,是杆球控制系统的扩展和延伸[1]。板球控制系统可以很直观地验证控制算法的有效性,为实际工程上的控制问题提供解决方案。同时,研究板球控制算法可以提高实际系统的稳定性。因此,设计一种合理有效的板球系统控制方法是非常有意义的[2]。
系统以2017年全国电子设计大赛B题为背景,设计并搭建了一个六自由度运动控制平台,采用STM32F407单片机作为主控模块,包含角度检测模块、直线电机模块、红外线定位装置、电机驱动和直流稳压电源模块,通过采集获取平台的姿态参数并进行计算调节,实现对小球轨迹的控制,通过控制平台的倾斜,使直径不大于25mm的小球能够按要求在限定时间内完成各种指定的运动轨迹。
1 方案的选择
1.1 滚球控制方案
小球运动平台的姿态调整可采用多自由度并联控制,利用PID控制算法进行运算,并将运算结果用于平台控制。最简单的控制方式是在x和y轴上对平台进行上下调整的二自由度控制。六自由度控制设计虽然复杂,但位置控制精度高,图1为六自由度并联运动平台设计效果图。六个动力系统平均分布在平台下方,与其他方案相比,六自由度并联运动平台具有刚度大、位置精度高和承载能力强等优点,可实现对平台的精确控制。
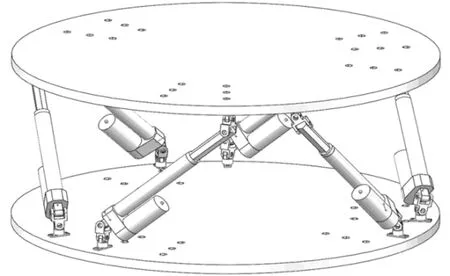
图1 六自由度并联控制运动平台设计效果图

图2 铰接点矢量图
1.2 硬件设计方案
使用直线电机,结构设计紧密,重量轻,用直流电机齿轮减速,内置微动开关,可实现行程走完自动停止,安装简易,同时易于调节和控制。采用MPU6050传感器。MPU6050模块内部自带电压稳定电路,直接连接STM32F407总控制器系统。通过读取MPU6050内部运动处理器所计算出的结果,可解算得到姿态角,读取简单、响应迅速,可有效减轻CPU负担。通过设置红外定位装置,检测小球的位置,反馈到控制器,计算控制量,通过控制直线电机以控制平台的倾斜角度,进而控制小球的运动轨迹。

图3 系统总体框图

图4 MPU6050原理图
2 运动平台位置计算分析
已知运动平台的姿态参数为q=(x,y,z,α,β,γ),利用位置反解方法求解伸缩杆的杆长li。图2为六自由度并联运动平台的铰接点的矢量图,如图2所示A为固定平台,B为运动平台,A上对应铰接点Ai与B上对应铰接点Bi与之间的距离|AiBi|即为各个伸缩杆的杆长li。
T为旋转变换矩阵,反映了固定坐标系OXYZ和运动坐标系ouvw之间的关系。p=(xpypzp)T是运动坐标系原点o在固定坐标系中的位置矢量ai=(xAi,yAizAi)T是Ai在固定坐标系中的位置矢量;bi=(xBiyBizBi)T是Bi在运动坐标系中的位置矢量。由图2可知,伸缩杆的杆长矢量Li为:
ai-(T×bi+p)
(1)
因此,计算伸缩杆长度的公式为:
li=|Li|=ai-(p+T×bi)=
(2)
已知ai与bi,给定运动平台B的位姿参数q=(x,y,z,α,β,γ),通过位置反解,就可以确定向量p与矩阵T,再利用公式(2)就能算出伸缩杆长度li[3]。
3 系统设计
3.1 电路设计
3.1.1 系统总体框图
图3所示为系统总体框图,主要由STM32F407单片机、MPU6050六轴传感器模块、直线电机控制模块、红外定位装置和直流稳压电源模块等部分组成[4]。

图5 直线电机驱动原理图
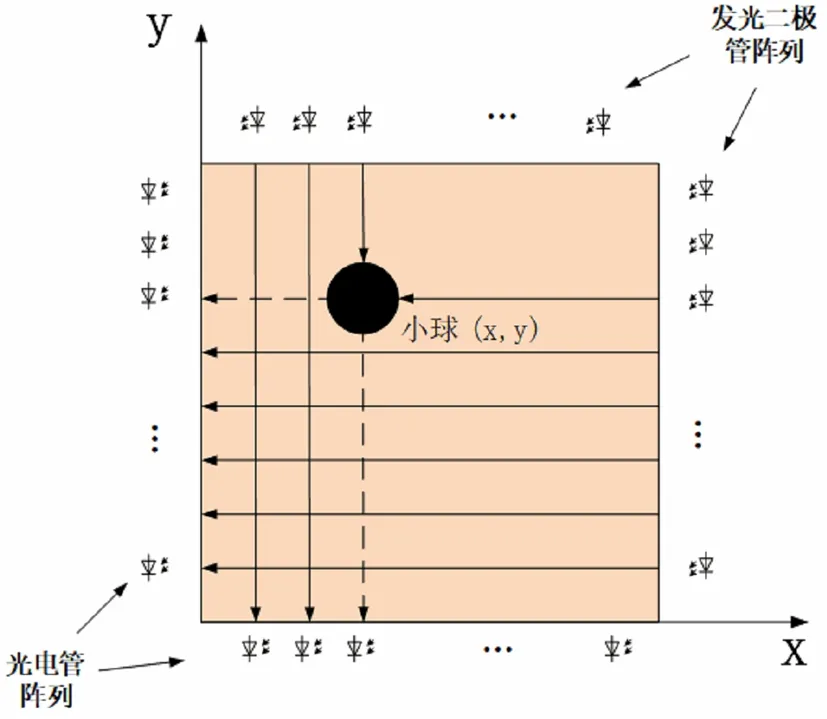
图6 红外定位装置示意图
3.1.2 角度检测模块设计
角度检测模块采用MPU6050六轴传感器设计,图4所示为MPU6050设计原理图。MPU6050内部自带三轴陀螺仪和三轴加速度传感器,含有两个I2C接口,主I2C接口结合自带的数字运动处理器硬件加速引擎,可以向应用端输出完整的九轴姿态融合演算数据;从I2C接口可以和外部磁力传感器连接。使用运动处理资料库,可非常方便地实现姿态解算,降低主控模块的运算负荷,同时大大降低了开发难度。
3.1.3 直线电机驱动设计
IR2104型半桥驱动芯片可以驱动高端和低端两个N沟道MOSFET,能产生较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能。使用两片IR2104可以组成完整的直流电机H桥式驱动电路。电机驱动原理图如图5所示[5]。

图7 程序流程图
3.1.4 红外定位装置设计
图6所示为红外定位装置示意图。在平台四周放置红外线发射和接收阵列,系统逐个扫描光电管接收的信号。因为小球的阻断,通过检测未接收到信号的光电管便可以快速获取横向和纵向坐标,从而确定小球在平台上的精确位置,定位精度达到5.4mm[6]。
3.2 程序设计
3.2.1 程序流程图
图7所示为系统控制程序流程图,包含主程序流程和中断程序流程。主程序主要完成功能是对系统进行初始化和延时UI(用户界面)处理,包括OLED实时显示小球位置区域及停留时间、按键控制等;中断处理程序主要是对平台姿态(加速度、角速度)、小球位置和速度、直线电机长度和速度等数据进行获取和处理,控制输出PWM信号,以及对小球进行定位时间检测等。
3.2.2 程序功能分析
系统通过STM32F407单片机来控制驱动电路,根据PID的调节来得到需要设定的角度,同时得到对应控制脉冲,输出PWM控制直线电机的推杆伸缩,使平台按照指定角度倾斜,从而使小球按照指定动作运动。其中按键开关进行模式和区域设置。
4 测试方案及结果
4.1 测试设备及方式
所用测试设备有:小球、量角器、直尺、秒表等。
测试方法描述如下:
(1)定位测试。将小球放置在平台上指定区域内,保持一定时间静止。
(2)定点测试。将小球放置在平台上某区域内,调节滚球控制系统使小球移动到另一指定区域内,并停留一段时间。
(3)定时测试。使小球在某一规定时间内完成指定动作。
4.2 测试数据
(1)驱动滚球控制系统工作,使小球在规定区域内停留,并记录停留时间和偏差位置。测试结果如表1所示:
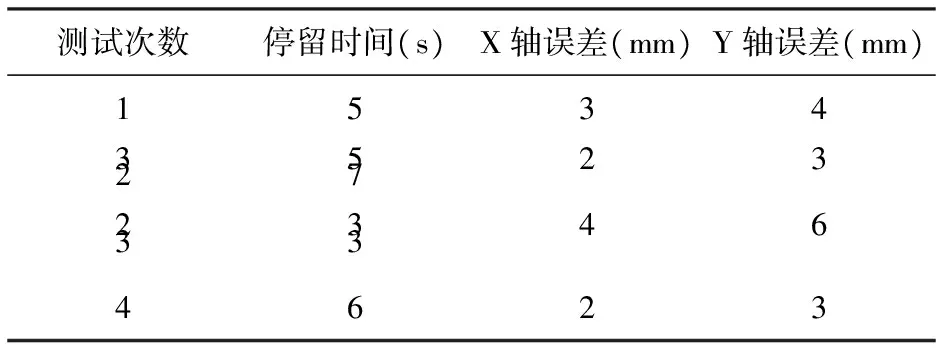
表1 区域定点停留测试数据
测试结果分析:定点停留测试能够准确完成,误差极小。
(2)驱动滚球装置系统工作,使小球从一个区域滚动到另一个指定区域,并停留一段时间。记录运动时间和停留时间。测试数据如表2所示:
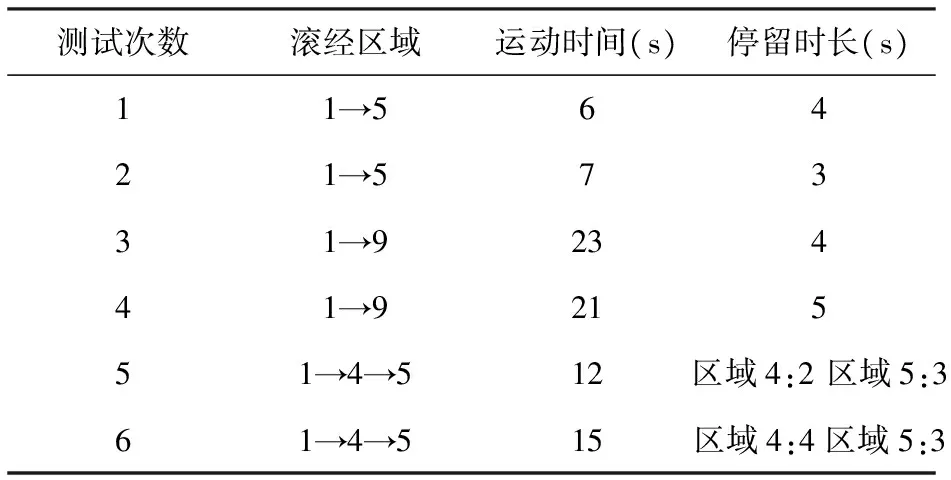
表2 运动和停留测试数据
测试结果分析:运动停留测试基本能够准确完成,但是在路线复杂情况下,运动时间较长。
(3) 规定时间内,让小球先后进入区域 2、区域 6,停止于区域9,在区域9中停留时间不少于2s。记录运动时间和停留时间,测试数据如表3:

表3 规定路线测试数据
测试结果分析:要通过的区域多,还要在指定区域停留,因此实现起来有一定难度,但是基本可以在指定时间内完成要求。时间上还有待缩短。
(4)用按键设置A、B、C、D区域,并控制小球完成动作。

表4 按键指定区域测试数据
测试结果分析:设置区域路线简单,能够较好完成,但是若为折线路线,则实现起来比较困难,在运动过程中,难以控制,耗时较长。
5 结 论
系统搭建了基于红外定位的六自由度板球控制平台,使用STM32F407单片机作为主控模块。经测试,控制精准,操作简单,性能可靠,技术指标达到了设计要求。
在系统设计和搭建过程中,分工明确,充分发挥各自所长,放弃使用传统的舵机作为执行机构,采用六自由度并联控制运动平台,虽然设计难度有所增加,但提高了控制精度,可实现对平台的精确控制。
[1] 苏信, 孙政顺, 赵世敏.板球系统的模糊控制方法研究[J].计算机仿真. 2006(09).165-167.
[2] 翟晨汐,李洪兴. 板球系统的直接自适应模糊滑模控制[J].计算机仿真. 2016(02).383-388.
[3] 李沛,杨小强,李焕良,等.基于Matlab/SimMechanics的六自由度并联运动平台建模与分析[J].机械与电子.2016(03).75-80.
[4] 王红睿,田彦涛,隋振,等.板球系统的非线性自适应控制[J].系统仿真学报.2010(05).1251-1256.
[5] 王金晨,纪成,何印洲.基于PWM的可调速电动汽车模型控制系统的设计[J].伺服控制.2011(08).42-45.
[6] 何成林,钟鸣,姚玉峰. 基于红外定位的微小型自重构移动机器人[J]. 机械与电子.2016(09).69-72.
猜你喜欢
灌篮(2022年4期)2022-06-17
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
科学与财富(2018年30期)2018-12-28
意林(绘英语)(2018年1期)2018-04-28
计算机应用(2016年9期)2016-11-01
体育科技(2016年2期)2016-02-28
当代体育科技(2015年3期)2015-12-05