
LiDAR点云数据分割方法的比较分析
2018-02-14 12:49李雅盟李朝奎陈奇褚楠
数字技术与应用 2018年10期
李雅盟 李朝奎 陈奇 褚楠

摘要:目前點云数据分割又分为基于面域、基于边界及混合三大类方法。与之前的方法不同,本文通过比较各类点云数据分割算法,得出各类分割算法的优缺点,并在实验过程中总结出点云数据在滤波、分类中的相关性,提出一种基于分类与分割迭代的分割算法。
关键词:点云;分割;比较分析
中图分类号:TN958.98 文献标识码:A 文章编号:1007-9416(2018)10-0000-00
激光雷达测量技术(LiDAR)以其观测精度高、作业效率高等优点,已在三维建模、森林资源管理、海岸侵蚀检测中得到广泛应用[1]。其中数据分割是点云数据生成栅格数据的关键环节。现存的点云数据分割算法主要分为基于边界、基于面域及混合分割算法这三大类,根据应用需求的不同,选取相应的算法进行数据分割[2,3]。
通过总结点云数据处理过程中的各个环节之间重要的相互关系,提出了一种基于分类与分割迭代的分割算法。
1 LiDAR点云分割算法的比较分析
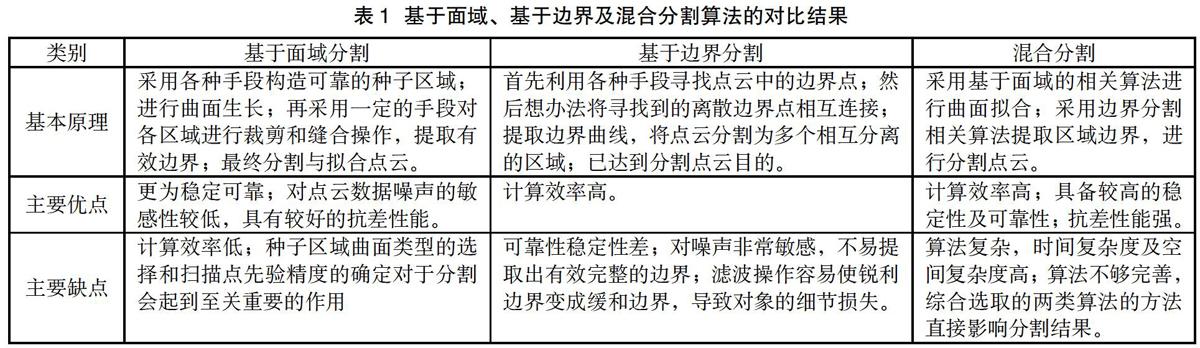
一般来说,点云数据分割算法可以分为基于边界的算法和基于面域的算法两大类。前者主要着眼于提取点云中代表不同曲面间边界的扫描点,然后根据得到的边界分割点云数据。而后者则主要着眼于寻找点云中具有相同属性的扫描点,构成可靠种子区域,然后对这些种子进行生长,最终达到分割点云数据的目的。很多研究人员综合使用了上述两种方法进行点云分割,即混合算法。其中基于面域的分割算法,又分为高级特性及扫描点聚类算法。
本实验通过对现有的点云分割算法,得到相应的实验结果,并结合算法思想,得到了基于面域、基于边界及混合算法的对比结果(见表1),基于面域的高级特性及扫描点聚类的对比结果(见表2)。
2 基于分类与分割迭代的分割算法
目前存在的算法都是基于面域或基于边界,且各种混合算法也只是为了得到一种基于边界及基于面域分割算法的最优组合,尽管有些混合算法达到了较好的分割结果,但针对不同的数据处理目的,算法不一定适用。
但是通过一系列数据处理实验,不难发现点云数据分类可能会直接影响到数据分割的精度,而这种影响又是相互的且线性相关。由于点云数据分割的目的就在于将空间划分为不同的区域,方便之后分门别类的对点云数据进行表面重建、三维建模等。所以点云数据的分割也直接影响到之后的表面重建工作。
基于以上原理及现存的算法总结,本文提出了一种将点云分类与分割迭代的新型算法。
2.1 基本原理
基于分类与分割迭代的分割算法的基本原理如下:
(1)首先对每个激光脚点生成小邻域;
(2)再将各个小邻域进行生长,属性相同的邻域进行合并,得到粗分割结果;
(3)然后对粗分割结果使用最大似然法进行粗差剔除,去除分割碎片.使得该算法具备很强的抗差能力;
(4)粗分割后,在各个类别中去除可靠性低于70%的种子,并选取可靠性最高的中心种子进行分门别类的生长,得出细分割结果;
(5)判断分割精度是否满足要求,若不满足则转到第四步;若满足则得到最终的分割结果。
2.2 算法优势
基于分类与分割迭代的分割算法是在总结点云数据处理过程中分类与分割的相关程度及其特点的基础上建立的,通过运用点云数据分类与分割过程中相互之间的影响,得出的一类新型算法。
该算法通过将点云数据的分类及分割过程迭代进行,克服了点云数据分类与分割中遇到的分类自动化程度低、分割效果差等缺点,可以大大缩减LiDAR后处理过程中的成本。
此外,该类算法通过使用聚类生长算法进行生长,具备抗差能力强、稳定性可靠性高、思路简单明了、适用性强等优点。
3 结语
分门别类总结现存的点云数据分割主流算法,得到各类算法的基本原理、优缺点,对于我们之后的学习工作有很好的导向作用。在实验过程中,通过发现点云数据分类、数据分割、表面重建环节的相关性,总结点云数据处理过程中各个环节的相互作用,提出一种基于分割与分类相互迭代的分割算法。该算法凌驾于其他三类算法,从数据处理环节链的角度,动态处理数据,能够同时达到数据分类与数据分割的目的,大大简化数据处理的复杂度,提高分类与分割处理的精度,有效缩短工作时间,适应性强。
参考文献
[1]Chen Z, Gao B, Devereux B. State-of-the-Art: DTM Generation Using Airborne LIDAR Data[J].Sensors,2017,17(1):150.
[2]Bose S K, Biswas K K, Gupta S K. An integrated approach for range image segmentation and representation[J].Artificial Intelligence in Engineering,1996,10(3):243-252.
[3]Kaveti S, Teoh E K, Wang H. Second-order implicit polynomials for segmentation of range images[J].Pattern Recognition,1996,29(6):937-949.
The Compare and Analysis of LiDAR Data Segmentation Methods*
LI Ya-meng1,2, LI Chao-kui1△, CHEN Qi1, CHU Nan1
(1.National-local Jo int Engineering Laboratory of Geo-Spatial Information Technology, University of Science and Technology, Xiangtan Hunan 411201;
2.School of Resource Environment and Safety Engineering, Hunan University of Science and Technology, Xiangtan Hunan 411201)
Abstract: LiDAR data segmentation methods are divided into three categories, including based on domain, based on the boundary and mixed. Different from previous methods, it is concluded that the advantages and disadvantages of all kinds of segmentation algorithms though comparing all kinds of LiDAR data segmentation methods. And summing up the point cloud data in the experimental process, the correlation among the various steps in processing, put forward a segmentation algorithm based on alternates of classification and segmentation.
Key words: point cloud; segmentation; comparative analysis
