基于ARM和DSP处理器的无人搜救船船载控制系统设计
2018-02-18 10:31罗楚江李锐豪
装备制造技术 2018年11期
罗楚江,李锐豪
(广州航海学院,广东 广州510725)
0 引言
无人驾驶技术已经成功应用于飞机和汽车,如百度无人车和大疆无人机等产品已经得到深入研究和应用,但与无人车和无人飞机相比,无人船艇的发展相对处于落后状态,智能化是当前船舶的发展方向,随着人工智能、物联网、高精度导航技术和动力定位技术的发展,无人驾驶船舶有了长足发展,无人船舶航行于全球将成为一种可能[1]。无人船作为水上搜救平台有着广泛的应用,以马航MH370空难为例,海难搜救目标往往范围广、距离远,大型救援船几乎很难在事发两小时黄金救援时间内找到现场。但若用飞机空投一批装载救援物资的无人船,则可立即实现大面积拉网式搜索,一艘发现目标,其他船迅速靠近救援。无人船艇的关键技术是实现船舶在各种不同水文环境下的自主航行,在无人船平台中,船载控制系统的主要功能是实现船舶运动状态控制、环境信息采集与船岸通信的功能[2]。岸端监控系统的主要功能是对无人船的运行状态、环境信息以及特定任务完成情况的显示和记录。
本文设计采用DSP和嵌入式ARM为平台的船载控制系统和基于Android系统的远程监控平台,船载控制系统的主要是由动力驱动单元、信息采集单元、航行控制单元、视觉处理单元和通信单元组成,通过目标检测技术和场景分割技术实现对落水人员的识别与定位,进而由无人船船载控制系统实现自动航行控制。船端与远程监控平台采用5.8 GHz无线通信技术实现数据交互,远程监控平台具有数据显示与处理、人工遥控、自航设置以及地图显示等功能。
1 系统总体设计
无人搜救船系统由船载控制系统和远程监控平台两大部分组成,系统的总体设计如图1所示。系统采用2.4 G无线通信方式实现船端与远程监控平台之间信息交流,船端控制系统通过环境信息采集单元将无人搜救船的环境因素发送给远程监控平台进行显示与处理,岸基远程监控平台可以实现对无人搜救船的遥控控制,由工作人员操纵无人船,亦可工作在自控模式,无人搜救船通过目标检测技术实现对救助目标的定位,实现自航,自航速度等参数由远程监控平台设置。无人搜救船的航行轨迹可以在远程监控平台实时显示。
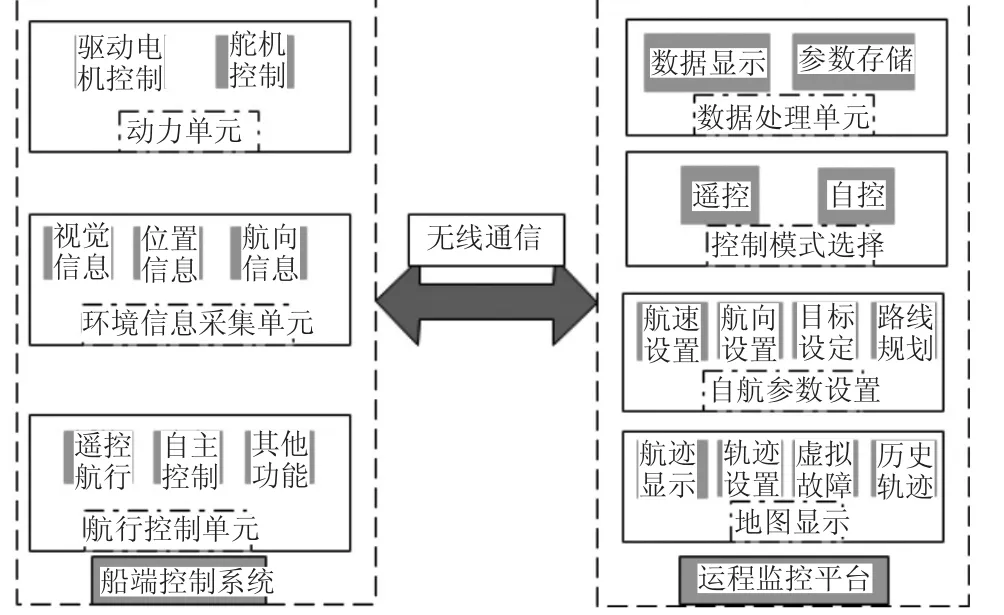
图1 无人搜救船系统总体设计图
2 船端控制系统硬件设计
无人搜救艇船端控制系统是无人搜救船的“执行者”,是无人搜救船智能控制的重要组成部分。设计以DSP和嵌入式STM32H7高速MCU实现对无人搜救船的动力控制、环境信息采集和航行控制等功能。船端控制系统设计框图如图2所示。
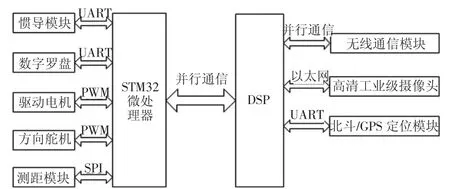
图2 船载控制系统硬件结构图
船载控制系统采用嵌入式STM32H743处理器和TMS320C6678多核固定浮点数字信号处理器。STM32H743是ST公司推出的高性能处理器,其工作频率为400 MHz的32位ARM Cortex-M7微处理器[3],TMS320C6678是TI基于KeyStone的多核固定浮点数字信号处理器,集成了C66x CorePac,每个核心在1至1.5GHz到10GHz的运行,支持高性能的信号处理应用[4]。设计STM32用于无人搜救船的动力控制和航行控制,STM32输出PWM分别控制电机的转速与方向舵机的转动角度,操纵无人搜救船的运动速度和运动方向。环境感知模块是由测距模块、高清工业级摄像头和北斗/GPS定位模块组成。航行控制单元用于控制无人搜救船的航行模式,可以选择为自航模式或遥控模式,若为遥控模式,远程监控平台通过2.4 G无线通信将监控信息发送给无人搜救船。若为自控模式,远程监控平台对无人搜救船设定目标,由路径规划算法实现自航控制。
2.1 动力控制单元电路设计
无人搜救船的动力单元是由驱动电机和舵机共同构成,由于有刷直流电机价格便宜、控制简单且稳定性高,故无人船的动力由有刷直流电机提供,通过L298N电机驱动芯片实现对有刷直流电机的驱动,其电机驱动电路如图3所示。L298N是ST公司生产的一种高电压、大电流电机驱动芯片,其持续工作电流为2 A,额定功率为25 W[5]。设计通过STM32高级定时器输出PWM实现对驱动电机的控制。无人搜救船的运动方向由方向舵机来控制,设计亦是采用STM32高级定时器实现舵机转角控制。
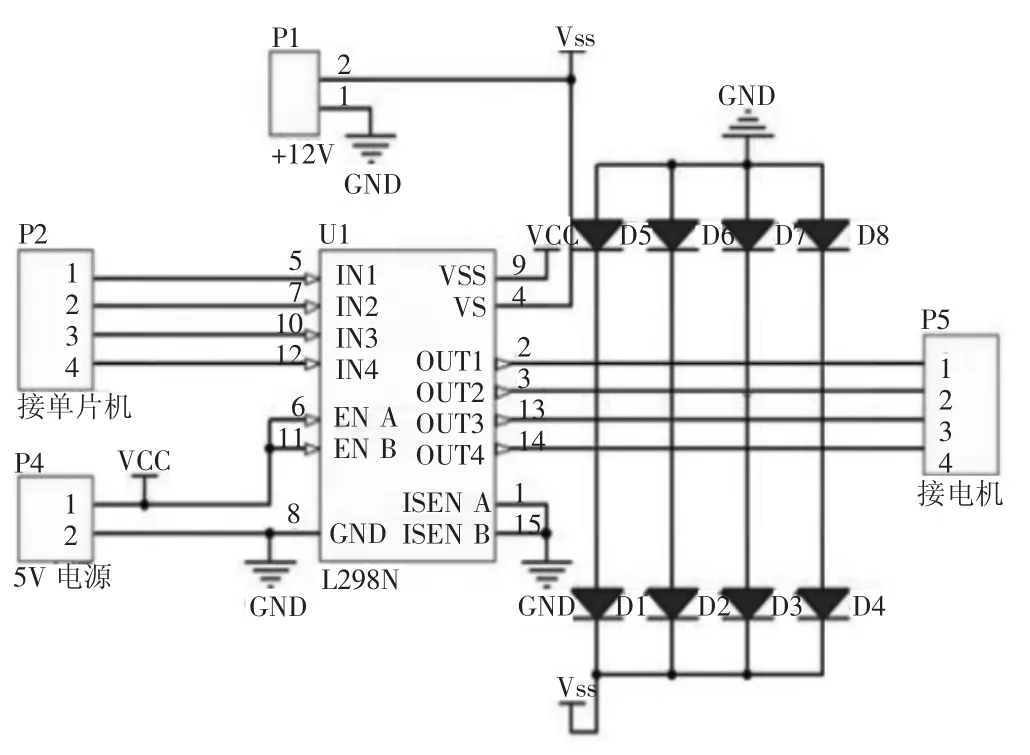
图3 无刷直流电机驱动电路设计图
2.2 环境信息采集单元电路设计
环境信息采集单元相当于无人搜救船的“眼睛”,通过高清工业摄像头采集的信息,由DSP处理器实时处理,通过目标检测算法,实现对落水人员的识别,并结合测距模块、北斗定位模块实现对落水人员的位置精确定位,由无线通信模块将此信息发送到远程监控平台。摄像头与DSP之间采用USB通信方式进行数据交互,从而保证高速数据通信的需求。北斗导航定位模块采用SkyTra公司的GPS+北斗双模定位芯片S1216F8-BD,,该芯片可实现米级精度的定位,定位模块与DSP处理通过串口通信进行数据交换。定位模块电路原理图如图4所示。
2.3 船岸无线通信模块设计
为满足无人搜救船与远程监控平台之间的通信,设计应用了工作在5.8 GHz频段的高速无线通信模块并配置高增益天线,以实现实时远距离通信,该无线通信技术是基于城域网标准IEEE802.16a,支持点对点和点对多点的网络结构,在无阻碍的情况下可以高达72Mbit/s的传输速率,最远通信距离可达50 km,能够满足一般图像或数据传输的要求。本设计采用SX1278半双工低中频收发器,该芯片的低频段为169 M和433 M,高频段为868M-915M,其电路原理图如图5所示。

图4 定位模块电路设计原理图
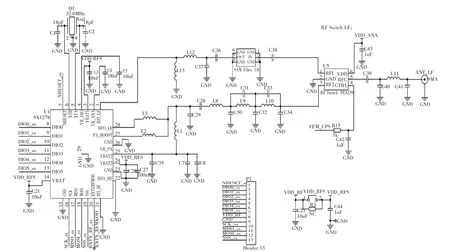
图55 .8G无线通信设计原理图
3 船载控制系统软件设计
船载控制系统软件的功能是控制STM32芯片和DSP芯片实现无人搜救船平台监控功能,STM32微处理器使用MDK5.0集成编译环境,DSP的开发环境为CCSV5.5.软件功能的设计流程图如图6所示。

图6 船载控制系统软件设计流程图
4 远程监控软件设计
为实现对无人搜救船的实时监控,设计采用基于Android系统的远程监控平台,远程监控平台设计了5.8 GHz通信模块,与无人搜救船进行通信。远程监控平台设计界面如图7所示。

图7 远程监控平台界面图
5 结论
本文设计了一种基于嵌入式ARM和DSP处理器的无人搜救船船载控制系统,船载控制系统由STM32H7和TMS320C6678DSP处理器、北斗/GPS定位模块、动力模块等组成,并采用5.8 GHz无线通信技术实现船载端与远程监控平台之间的信息交互,将无人搜救船的采集的环境信息、视频信息以及控制信息传输到远程监控平台。无人船的控制分为自航和遥控模式,采用基于Android操作系统的远程监控平台,实现对无人搜救船的实时监控,可以提高无人船的工作效率,并确保航行安全,结合高清摄像头及目标检测技术,可用于水上搜救,具有一定的推广价值。
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
学生天地(2018年19期)2018-09-07
岷峨诗稿(2017年4期)2017-04-20
科学大众(中学)(2016年8期)2016-05-14