电动汽车后轮转向系统的设计分析
2018-02-18 10:31王书贤
装备制造技术 2018年11期
钱 伟,张 弛,王书贤
(湖北文理学院汽车与交通工程学院,湖北 襄阳441053)
随着汽车技术的发展,燃油汽车的缺陷日益突出,而中国作为汽车保有总量最大的国家之一,每一个技术的创新都会对中国汽车市场发展有着重要意义。新能源汽车的发展趋势日益迅猛,纯电动汽车在行驶、操作、维修方面明显优于传统燃油汽车,但是其现有的发展瓶颈主要在于电池续驶里程、充放电限制、制造成本及安全性等问题,导致很多购买者对其止步观望,这也是电动汽车最大的缺陷。目前一方面除了要考虑电池综合性能的提升问题,还可以从减轻车身质量的角度去考虑,在底盘结构方面作进一步的优化。
根据收集文献和市场调查发现现有的汽车底盘结构过于复杂,并且大部分汽车底盘都占了整车整备质量的一半以上,但后轮转向技术的发展将极大程度上解决这些问题,基本可以省去发动机、离合器、变速器、万向传动装置、差速器总成及其半轴,真正实现汽车“硬件的软化”,并在制动上可以实现可再生制动。由于转向角度由电脑自行控制,因此可以进一步提高行车安全,在独特的后轮转向上也有着明显的驾驶快感。因此对于在新能源汽车推行的背景下改善汽车转向系统有着重要的意义。
1 前轮转向特性
现有车辆具有三种转向行驶特性,分别为:不足转向、中性转向和过度转向。不足转向表现为车辆在转向时的实际转向角度比前轮的转动角度小,前轮出现了向外侧的滑动;过度转向表现为车辆在转向时的实际转向角度比前轮的转动角度大,后轮出现了向外侧的滑动;中性转向表现为车辆在转向时的实际转向角度恰好是前轮的转动角度,这种转向特性往往可以达到最大的转弯速度。对于前轮驱动的车辆来说,在出现不足转向时,可以通过降低车速来解决。但是,如果出现较严重的过度转向,则需要反打方向并配合加油来通过,不过这对驾驶员的驾驶技术要求很高,若真正实现理想转向仅仅依靠驾驶员有着较大难度。
2 后轮转向机理
我们提出的后轮转向技术主要是针对于纯电动汽车,两前轮利用两台轮毂电机独立驱动(两轮位置与车身处于恒定角θ=0°),这种结构由原来的通过方向盘控制前轮摆动的功能变成了调节前轮轮毂电机转速差的功能;油门也由原来控制节气门开度的功能改变成为调节两轮毂电机的总输出功率P[w]的功能。利用固定于方向盘上的角度传感器[1]、加速踏板的位移传感器[2]与两轮毂电机上的角速度传感器[3]分别连接行车电脑ECU的输入端口进行信号计算与比较,具体工况如下(A、B、C、D 均为常数变量):
(1)当车辆保持直线行驶状态时,加速踏板X[w]=A有位移信号,两轮毂电机动作P[w]=C,方向盘θ[w]=0角度传感器为“低电平”,故综合判断为“不转向”,产生影响为继续保持直线行驶。
(2)当加速踏板X[w]=A位移传感器动作、两轮毂电机动作P[w]=C、方向盘θ[w]=B角度传感器动作时,故综合判断为“转向”。后轮摆动的具体方向角可通过A、B的大小来计算,使其达到不打滑转向。同时产生摆角V[w]=D,并反馈给电脑与转速传感器的感知量进行对比修正,最终产生影响为不打滑转向。
(3)当加速踏板无位移X[w]=0,两轮毂总功率P[w]=0时,可判断为驻车状态。若方向盘出现θ[w]=B的角度时,可进一步判断为“原地转向”,具体的转向方向角为驻车程序所控制,产生影响为原地转向以便于汽车启动行驶。
(4)当加速踏板X[w]=0,两轮毂总功率X[w]=0时,可判断为驻车状态。若方向盘θ[w]=0,可进一步综合判断为“原地不转向”。
以上四类情况为正常使用汽车的通例[4]。综上所述,这几种情形能更好的实现前轮的行驶功能和后轮的转向功能,并且对驾驶员的操作要求简单,在行驶过程中可以完全保证不打滑行驶,另外,后轮转向转弯半径更小,转向中心大致位于车辆中心,转向更加平顺流畅。还有就是结构更加简单,省去了绝大部分的转向机构和传动机构,因此可大大减轻整车质量并增加了续航里程。车辆转向控制流程图如图1所示。
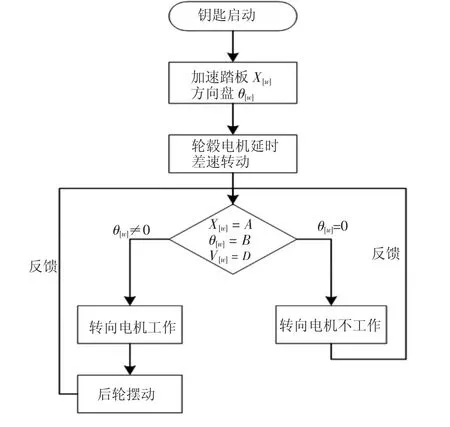
图1 车辆转向控制流程图
3 后轮转向机理分析
为了分析后轮转向车辆的合理性,从转向特性出发,并采用二自由度模型对前、后轮转向车辆进行比较。
3.1 侧向加速度时域特性分析
行驶过程中在转向轮转动方向相同的情况下,前轮转向车辆与后轮转向车辆的重心处于侧向角速度相反的方向上,后轮的从动效果使得重心位于转弯半径靠内一侧,内外侧轮胎基本受力均匀,整车重心处的侧向加速度稳态值将减小,车辆过弯时会更加平顺,在低摩擦系数的条件下更不容易出现侧滑的现象。因为后轮的转弯半径大于前轮,所以对轴距过大的车辆来讲不会出现后轮内轮差[4]的现象,使车辆行驶更加安全。
后轮转向特性与前轮转向特性存在两种反向情况,这两种情况表现出两种完全不同的转向特性(如图2所示),也就是同向削弱不足转向,反向减轻过度转向,这样会让汽车有更好的平衡性。

图2 前轮转向车辆和后轮转向车辆阶跃响应比较
3.2 侧向偏角时域特性比较
高速行驶时,若前、后轮转向相同,前轮转向车辆和后轮转向车辆所产生的车辆重心侧偏角方向相反(如图3所示),这种变化会导致转向特性的改变,后轮转向可弥补由于使用橡胶型充气轮胎所导致的车辆转向机构的先天缺陷,这种后轮转向系统的工作原理类似于ESP系统,即车辆高速运动时,通过制动某个或某几个车轮,以保持车辆行驶状态的稳定。
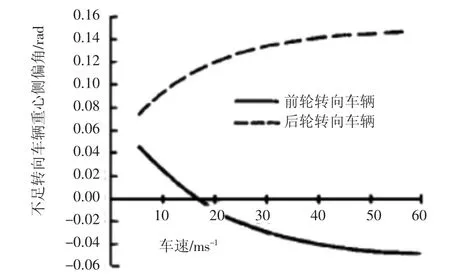
图3 侧偏角随车速的变化规律
4 后轮转向特性
在低速时,后轮转向车辆的后轮产生与弯道相反的转角,整车的转向中心移至前轮(如图4所示),驾驶员拥有更开阔的驾驶视角,行车更加安全。前轮转向车辆在转向时整车重心会偏向外侧后轮(如图5所示),这样就会受到背离弯道较大的离心力作用,由于轮胎设计一般在切线方向有较大的抓地力,而法线方向摩擦力不足,在摩擦系数较小的路面直接会出现甩尾现象,严重影响驾驶安全。而后轮转向时后轮的侧向位移会弥补重心侧移量,带来的好处是侧滑力消失,四轮抓地力相等,从而使驾驶安全得到了极大的提高。但这种情况也有其不足之处,后轮在转向时转弯半径会比前轮大(如图6所示),因而产生与前轮转向一样的前轮内轮差,并且由于后轮半径大于前轮,在车辆停车时必须留有后轮转向行程的空隙,因此无法停靠路面边缘。
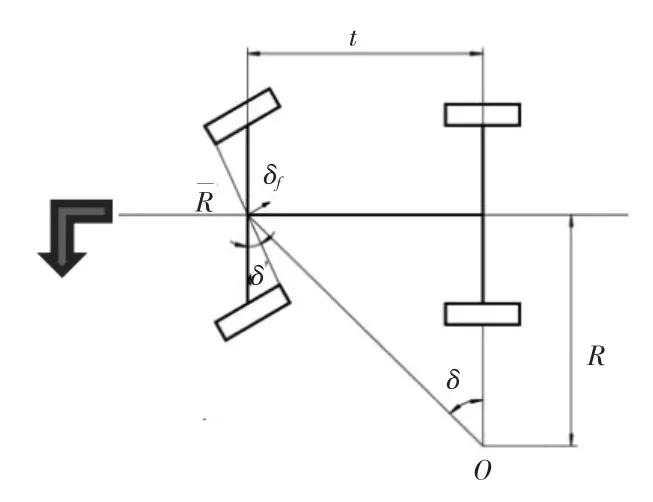
图4 前轮转向车情况
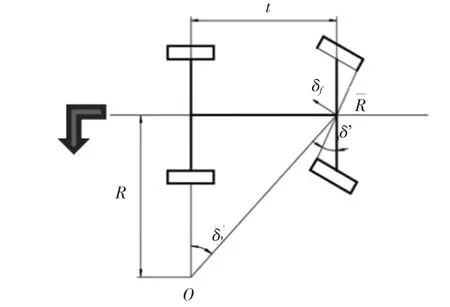
图5 后轮转向情况
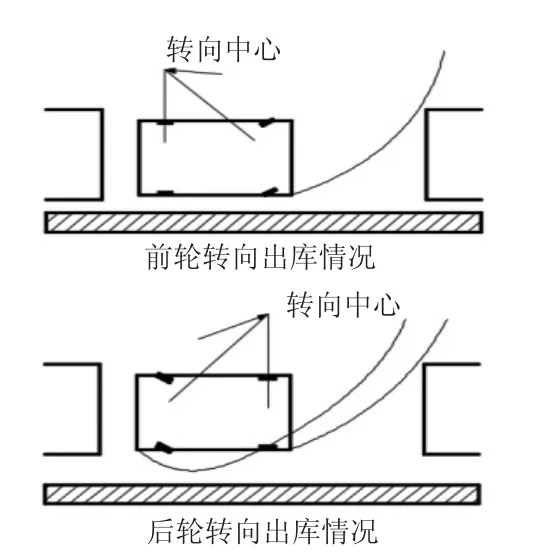
图6 前、后轮转向出库情况
5 结束语
综上所述,后轮转向所具有的优势为:车辆总体质量大大减轻,车身结构简化使其能量利用率大大提高,驾驶视角更加开阔,且重心侧移角为零。然而后轮转向系统的核心技术主要集中在控制系统上,工作时控制系统只需要接受车辆的各种动态行驶信号(来自各传感器),然后综合判断输出一个最佳的转向角度,任何计算的失误都有可能导致车辆失去控制,特别是在车辆高速行驶时。
对于现有的纯电动汽车来说,相关的科技人员在车载电源系统、电控系统以及电机系统都已取得了一定的研究成果,但是很少有在车身结构上作出一定的改进,另外新能源汽车的瓶颈问题也让我们止步不前。后轮转向技术也还没有步入实际应用阶段,主要的原因是缺少客观认识和科研投入力度不足,但近年来在一些指标[5]上面(稳态侧偏角,横摆角速度和侧向角速度的幅相频特性等)还是有较大程度的改善的(如下式所示)。

其中:E为轨道误差;δ为方向盘角位移;y为侧向角速度;β为重心侧偏角速度。
后轮转向系统的研究可以说是一种创新性的研究方向,其有前轮转向无法带来的特性,虽然后轮转向系统真正运用于汽车上面可能会有一些问题,例如安全问题,交通法规,控制程序等,但是只要有更多人去钻研这个问题,相信在不久的未来利用后轮转向的纯电动汽车会出现在公路上。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
小学生学习指导·爆笑校园(2019年6期)2019-09-10
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中国自行车·骑行风尚(2014年4期)2014-10-10