
无人艇操纵性与智能控制技术
2018-02-26 09:45黄惠霖
电子技术与软件工程 2018年16期
黄惠霖
摘要
随着大家越来越深入展开海洋开发活动,无人艇相对而言应用越来越广泛。而智能控制技术最早于上世纪七十年代末提出,发展至今已经形成相对而言较成熟的理论,且其应用实践效果相对也较为良好。随着智能控制技术的提出和不断发展,人们正深入研究如何有效、高效将其技术运用于无人艇操纵中。本论文将就无人艇操纵性与智能控制技术这一问题展开深入探究和分析。
【关键词】海洋开发 无人艇操纵性 智能控制技术 实施策略
1 基于智能控制技术的船舶操纵控制
1.1 控制程序
这里,将基于仿人智能控制展开无人艇操纵控制。具体阐述其实施过程,如下:
1.1.1 基于允许误差范围设计轨迹
系统预先根据实际情况设计一个相对合理的性能指标,继而基于此指标得出对应理想状况下的单位阶跃响应。将这一内容同等转换到误差相平面上,则可以得到同等理想状况下的轨迹图,即基于允许误差范围设计轨迹。轨迹图上所呈现的点,则作为依据展开过程的瞬间控制。
1.1.2 构建特征模型
目标轨迹在相平面内表现出的位置以及运行控制情况,以此为依据得到相对合适的特征基元集Qi,然后在此基元集中选出特征区域,进而可以得到不同等级的特征模型Φi。
1.1.3 设计控制模态集和控制规则
通过特征模型以及允许误差范围内的轨迹差距,展开模拟。具体来说就是指,模拟人的控制方式,从而得到校正模态集。然后具体参数则可以体现出来。特征模型结合人自身控制经验,加上一定的推理规则,相对而言可以得出不同的控制模态。
1.2 操纵控制级设计
基于不同方法调试操纵控制,相对而言可以在一定程度上减小实际轨迹与理想轨迹间存在的误差,关于这一问题,大家应该注意以下几方面内容:
(1)初始展开航行控制活动,实际轨迹与理想轨迹二者存在的误差相对而言最大。而借助磅一磅模态控制,可以得出偏差变化速度,并对增加系统收敛速度起到积极推动作用。
(2)偏差速度变小,假若v变化v预设变化这一情况,则应该注意结合运用比例模态以及微分模态两种方式,进而在一定程度上降低偏差变化速率,从而避免超调问题的发生。
(3)假设误差变化速度没有超过预期误差范围,则运用模态控制,对偏差变化速率展开实时观测。
(4)假若未采取有效措施避免超调问题的发生,当问题出现时,应该注意运用比例和微分以及积分控制来对偏差继续增大产生抑制作用,进而对减小变化速率产生积极影响。
(5)假设偏差以及变化率均处于稳定误差范围内,应当选择模态控制,对调节控制系统于一平衡状态产生积极影响。而为了消除外界干扰,应该借助极值采样展开相应的模态控制,从而保障可以有效将系统误差降至最低。
1.3 智能控制系统
具体闡述智能控制系统,其结构:任务的交叉与理解→任务的协调→混合知识的表示→规划、控制→常规控制→执行器→广义对象→各种传感器→信息处理→信息理解→混合知识的表示→任务的协调→任务的交叉与理解→任务的协调→……
2 无人艇智能控制设计
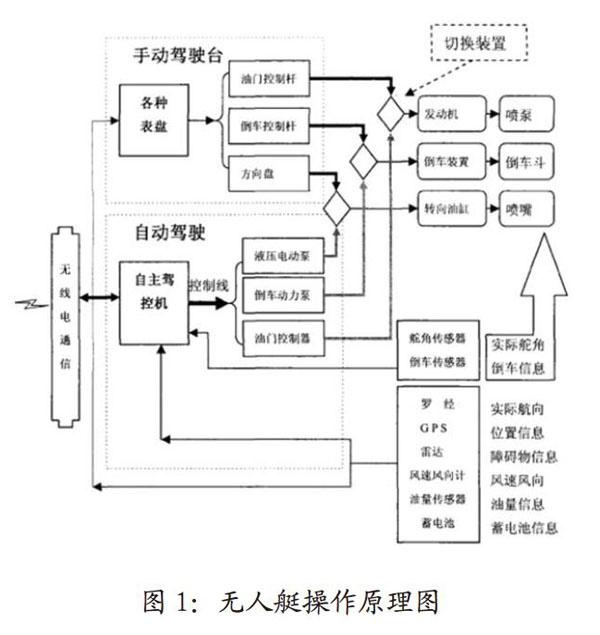
具体来说,根据无人艇的实际需求及相关特点,可以将其大致分为两种控制方式:手动驾驶和自动驾驶。其操纵原理如图1所示。
2.1 手动驾驶
具体就是指,驾驶员于驾驶台上,基于各种表盘数据及表现情况,掌握无人艇所在位置、航向、航速以及障碍物等信息。驾驶员可以基于操作放线盘来控制航向,借助操纵油门操纵杆来控制航速,以及通过操纵倒车控制杆用来控制前进或倒车。值得一提的是,驾驶员应该注意及时接受表盘数据信息反馈,进而可以针对未达到期望航行要求的活动展开控制调节。
2.2 自主驾驶
具体就是指,自主驾驶机计算得到的控制信号作为依据,驱动液压电动泵、倒车动力泵以及发动机油门。对有效控制喷水口转向、倒车斗转向、发动机输出功率产生积极影响,从而对有效掌控航向、航速等情况产生积极影响。比如,展开航向控制活动时,应该注意结合预期航向与当前航向相关信息展开分析,进而通过控制器的计算得出相应的控制信号,再将其输出至自动操舵仪。继而,其借助控制操舵机构实现对喷水口以及喷水方向的有效控制,最终对控制航向起到积极影响。此外,还应该注意结合期望航向以及实际舵角等相关信息展开分析,从而可以实时调整舵角,对有效实现控制航向起到积极推动作用。
3 总结语
总而言之,无人艇相对而言具有较广泛的应用前景。其既可以用于军用方面,对展开搜索、营救活动展开积极影响,而且也可以用于民用发面。究其根本原因在于,其隐蔽性好,且相对而言机动灵活,在海洋开采、勘探以及环境监测等等活动中均可以被运用。这就要求我们更应该注意强调无人艇的智能化发展,并对其展开深入探究。
参考文献
[1]姜岩蕾,周伟.基于智能控制技术的无人艇操纵性研究[J].舰船科学技术,2017,39(10):70-72.
[2]廖煜雷,张铭钧,董早鹏,刘鹏.无人艇运动控制方法的回顾与展望[J].中国造船,2017,55(04):206-216.
猜你喜欢
中国新通信(2016年21期)2017-01-06
科教导刊(2016年25期)2016-11-15
文艺生活·中旬刊(2016年9期)2016-11-07
人间(2016年26期)2016-11-03
考试周刊(2016年76期)2016-10-09
