地面情报雷达点迹过滤技术研究
2018-02-26 12:23官林海
电子技术与软件工程 2018年17期
官林海

摘要
在雷达扫描过程中,由于受到外部环境的影响,实际回波中总是混杂着噪声、杂波和各类千扰,这些杂波和干扰信号被雷达检测和提取后,形成虚假点迹,如果不进行处理,将会大大提高形成虚假航迹的概率,严重影响雷达的探测性能。本文所述点迹过滤技术是通过提取真假目标点迹的归一化幅度、距离展宽、方位展宽等特征信息,然后对得到的每个目标点迹计算风险系数,根据风险系数判别目标的真假性,进而别除虚假点迹,并进行计算仿真。最后利用该方法对外场实录数据进行处理测试,结果表明实测结果与仿真结果一致。
【关键词】虚假点迹 点迹过滤 真假目标
1 引言
地面情报雷达一般也称作地面监视雷达或地面警戒雷达,主要用作国土防空和空中交通管制,多采用边搜索边跟踪体制,能同时对一定仰角和一定距离、360°全方位范围内的目标进行探测跟踪。探测过程中,由于地面反射、通讯基站、广播电台等的影响,回波中总是混杂着机内噪声、地物杂波和各类干扰,从而形成虚假点迹。虚假点迹包括噪声虚警、杂波剩余及干扰所形成的点迹,它们具有随机特性。雷达的目标提取器不仅能检测、录取真实目标的点迹数据,同时也能录取虚假目标的点迹数据,这些真假目标的点迹会一起被上报到雷达终端显示器中,这不仅加大了计算机的处理量,而且也不利于目标航迹的跟踪。剔除虚假点迹主要通过雷达的信号处理系统完成,例如采用旁瓣相消、动目标显示(MTI)、动目标检测(MTD)、恒虚警(OFAB)检测、杂波图等处理方法。另外,也可以依据真假目标点迹分布特性的不同對目标点迹进行判别,形成点迹过滤的准则,本文主要针对点迹过滤技术进行研究。
2 点迹过滤
点迹过滤主要是利用雷达回波点迹的不同特征参数信息,计算出点迹的风险系数(0到1之间),然后据此剔除一些虚假点迹。基本措施是对提取的目标点迹的各个特征两两组合,然后求出该特征组合下的似然概率,最后对所有特征组合下的似然概率加权求和,得出用于判别点迹真假的风险系数。
为了计算目标真假性的似然概率,雷达首先识别和标识出所有真假目标样本的点迹。然后对真假目标的点迹,提取有用的特征信息,分别计算点迹每个特征对应的均值和标准差。接下来把真假点迹的特征进行组合(如(X,Y),X,Y代表特征信息)放在同一坐标系中,如图1所示。
(图1中:X,Y代表点迹的特征信息,LK代表似然概率,V是真目标样本集,F是假目标样本集。)
找出一条区分目标真假的分隔线D0,左右等距平移直线D0,得到线D1和D2,它们之间的宽度由α确定:
式中,α是(0,1.0)之间的常量,X0,X1,X2是D0、D1和D2与X轴的交点,Y0,Y1,Y2是D0、D1和D2与Y轴的交点。
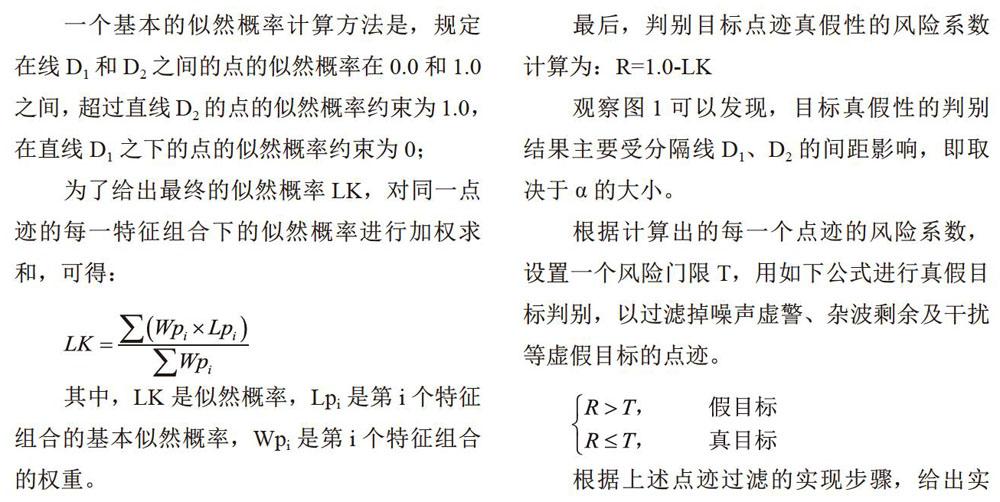
一个基本的似然概率计算方法是,规定在线D1和D2之间的点的似然概率在0.0和1.0之间,超过直线D:的点的似然概率约束为1.0,在直线D1之下的点的似然概率约束为0;
为了给出最终的似然概率LK,对同一点迹的每一特征组合下的似然概率进行加权求和,可得:
其中,LK是似然概率,Lpi是第i个特征组合的基本似然概率,wpi是第i个特征组合的权重。
最后,判别目标点迹真假性的风险系数计算为:R=1.0-LK
观察图1可以发现,目标真假性的判别结果主要受分隔线D1、D2的间距影响,即取决于α的大小。
根据计算出的每一个点迹的风险系数,设置一个风险门限T,用如下公式进行真假目标判别,以过滤掉噪声虚警、杂波剩余及干扰等虚假目标的点迹。根据上述点迹过滤的实现步骤,给出实现流程图(图2),并据此进行仿真实验:
3 计算仿真
上节所述特征组合的选择,一般取决于雷达类型、工作模式、杂波环境及干扰类型等。本章我们提取的目标三个特征参数信息是:目标点迹的归一化幅度、距离展宽、方位展宽,它们对应的均值和标准差见表1。
3.1 仿真结果
(1)利用上述真假目标判别的求解步骤,对照图1给出一种特征组合下的似然概率划分图(图3)。
(2)本仿真T=0.9,由第2章可知,假目标的风险系数应为R假>0.9,真目标的风险系数应为R真≤0.9。下面取3组α值,分析真假目标判别的性能。
1.当α=0.1时,各取100组真、假目标的特征信息,求解出风险系数如图4所示。
观察图4及表2可以得出,α=0.1时真假目标判别的正确率为P0.1=(97+79)/200%=88%。部分假目标点迹的风险系数并不满足判别条件,真目标点迹的风险系数基本上都满足判别条件。因此,得出的结果会把一些假目标的点迹判别为真目标,把少许真目标的点迹判别为假目标。
2.当α=0.5时,各取100组真、假目标的特征信息,求解出风险系数如图5所示。
观察图5及表3可以得出,α=0.5时真假目标判别的正确率为P0.5=61.5%。
3.当α=0.9时,各取100组真、假目标的特征信息,求解出风险系数如图6所示。
观察图6及表4可以得出,α=0.9时真假目标判别的正确率为P0.9=50.5%。
统计上述3组判别结果见表5。
由表5可以看出,随着α值的增加,真假目标的联合判别正确率逐渐降低。同时对照表2~4也可以发现,随着α值的增加,真目标的判别正确率提高,但假目标的判别正确率降低。当α取值较小时,真假目标的联合判别正确率比较高,但也会使部分真目标被判别为假目标,这将导致真目标点迹的丢失,不利于跟踪,因此应根据实际情况选择。值的大小。
4 实测数据处理结果
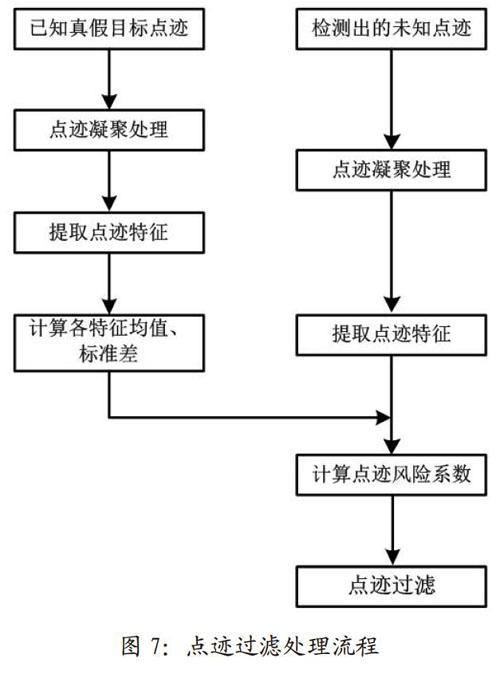
在上述理论仿真的基础上,进行了实测数据处理验证。通过对某雷达实测回波信号进行脉压、多普勒滤波、CFAR及杂波图检测等处理得到目标点迹,进而通过对比二次雷达信息选取出真、假目标点迹作为训练样本,分别得到真、假目标各个特征的均值、标准差。对未知点迹采用第2章所述算法计算风险系数,对高风险点迹进行过滤,基本处理流程如图7所不。
目标点迹凝聚处理的过程在电子工业出版社出版的《雷达信号处理和数据处理技术》一书中有详细描述,本文不再赘述。
目标的原始点迹经凝聚处理后,己获得唯一的距离、方位估计值。同时,在进行上述凝聚的过程中,分别提取点迹在距离、方位上的展宽特性。
经过点迹凝聚处理己得到點迹的距离、方位、幅度及距离展宽、方位展宽等信息,紧接着对得到的点迹计算其风险系数。本次实测数据处理中,所设风险门限T=0.9,不同α值时的判别结果如下:
(1)α=0.1的判别结果
对上图所示点迹进行统计:点迹过滤前有21021个点迹,点迹过滤后有8057个点迹(α=0.1)。由此可以发现第2章所述点迹过滤算法取得了一定的点迹剔除效果。同时可以发现,对于区域A,原始点迹中被虚假点迹掩盖住的真目标航迹,经过点迹过滤处理后显性的出现在视野中。当然,对于区域B,也可以发现点迹过滤后,部分真目标点迹被判错。通过对比二次雷达提供的航迹信息,真实目标的判别正确率约为87.56%。
5 结论
通过对比上述不同α值时实测点迹过滤结果可以发现,一方面随着α值的增大,真目标判别的正确率逐渐增大;但是,另一方面随着α值的增大,剔除的虚假点迹个数也逐渐减少,所得结果与第3章的仿真结果一致。工程应用中,应根据实际情况选择合适的α值,以达到预期的效果。
参考文献
[1]吴顺君,梅晓春等编著.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[2]Merrill I.Skolnik主编,王军等译.雷达手册[M].(第二版中译本)北京:电子工业出版社,2003.
[3]丁鹭飞,耿富录编著.雷达原理[M].(第三版)西安电子科技大学出版社,2014.
[4] Mark.A.Richards著,邢孟道等译.雷达信号处理基础[M].北京:电子工业出版社,2008.