基于STM32F103C8T6智能电磁振打控制系统设计与实现
2018-02-26 12:23刘小刚张红飙郑鑫刘锡尧
电子技术与软件工程 2018年17期
刘小刚 张红飙 郑鑫 刘锡尧

摘要
电除尘技术在环保行业中占有重要的地位,而智能电磁振打控制系统是电除尘清灰控制系统中的关键。智能电磁振打控制系统以STM32F103C8T6可编程控制器为核心进行开发,采用SCR控制技术来驱动振打器,并且结合合信TP07触摸屏作为人机交互界面,使操作可视化。该系统还设计了智能过流、过压保护电路,可靠性高,响应速度快适应性强。
【关键词】电除尘振打系统 STM32F103C8T6SCR技术 系统 电磁振打
目前,根据相关行业统计报告,我国的粉尘排放总量己高达1740万吨,仅仅电力这一行业每年的排放量就达420万吨。我国每年因为环境污染而造成的经济损失约为540亿美元,因为环境生态而导致的自然灾害和其治理成本约占整个国民经济总产值的5%左右,解决工业粉尘排放一直是我国政府的关注焦点。
当前我国采用的主要除尘技术是烟气粉尘脱离除尘,其技术主要有袋式除尘器和电除尘器两种应用,电除尘器包括放电极和收尘极,在放电电极端产生一个足以使气体电离的静电场,当粉尘气体经过时会由于强电场的作用下电离,并使粉尘带电,利用电场力使粉尘粒子向收尘电极方向运动并在收尘电极上沉积。当收尘极表面沉积一定厚度粉尘时,将直接影响除尘效率。因此,有效的清除电极板上的粉尘,是电除尘器能否高效稳定运行的前提。顶部振打清灰技术,可以有效的清除两个电极板上的沉积粉尘。
电除尘器能否稳定高效运行,主要取决于电极板上的粉尘有无有效清除,如果振打的力度过小的话,会引起严重的反向电晕,而反向电晕会使电晕持续增大,除尘效率就会下降而当振打力太大的时候,从极板上剥落的粉尘难形成片块状落下,容易形成“二次扬尘”,而且对振打系统的整个机械损耗很大。因此,智能电磁振打控制系统的设计研究就显得非常重要。
1 硬件系统的设计原理
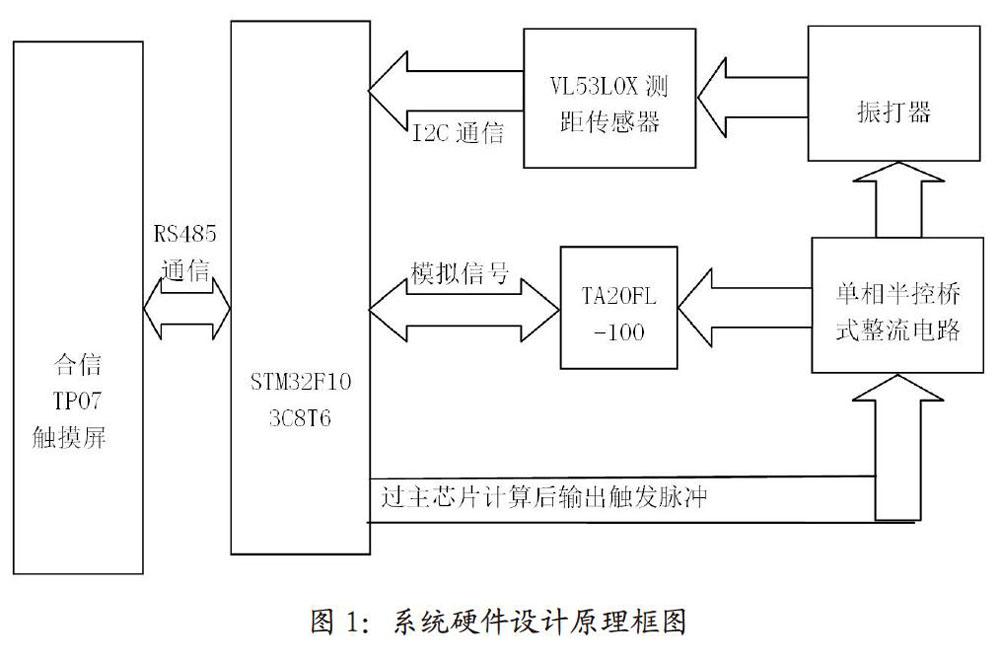
智能电磁振打控制系统包括主系统和驱动单元两个部分,主系统主要包含主控系统和人机交互界面,而振打器的正常工作则由驱动单元负责。核心控制器通过MODBUS协议来获取人机界面所设置的相关参数,经过相关计算后通过控制器输出一系列脉冲来启动驱动单元,并且通过反馈信号采集驱动单元输出电流及振打高度来判断相控角是否准确。本设计选用STM32F103C8T6作为核心控制器,驱动单元采用单相半控桥式整流电路,结合TP07触摸屏、VL53LOX、TA20FL-100以及MAX485E等组成整个系统。如图1所示。
1.1 核心控制器原理图设计
核心控制器模塊包含两部分电路,一部分电路是以STM32F103C8T6单片机为核心控制芯片的最小系统电路,如图2所示。该电路包括了晶振电路、复位电路、数码管驱动芯片电路以及单片机稳定工作需要的去耦电容。当系统工作时,STM32F103C8T6通过检测电压电路送来的信号来判断电路是否处于正常工作电压范围内,然后通过接收触摸屏发过来的工作参数,通过计算后输出相对应的触发脉冲至驱动单元,然后通过反馈采集系统来采集信号,分析运行效果是否与期望相同,如果实际运行效果与期望效果相差太远,则电路暂停输出。
另一部分是由同步信号电路、电压检测电路及电流检测电路组成,同步信号检测电路如图3所示。同步信号电路由三极管Q3及其电路构成,当三极管Q3的B点电位高于E点电位约0.7V时,此时C点的电位高于B点电位,发射结处于正偏状态,且集电结处于反偏状态,因此三极管Q3处于工作状态,则TB输出低电平;反之则输出高电平。其波形如图4所示,其中B波形为整流后的交流电信号,A波形为同步信号输出,即交流电的零点所在。
如图3-5所示,电压检测电路采用电阻分压形式来采样,根据欧姆定律U=IR可得:
Ua为输入到单片机的电压信号
Uin为整流后的交流电信号
因此,STM32F103C8T6通过检测Ua的电压值就可以得到Uin的电压值,假设Ua为2.52V,R16为200Ω,已知变压器匝数比为220/9,那么由公式(1)即可算出Uin为9.44V,则供电电压大约为230V,处于正常工作电压。
如图6,驱动板上的输出电流由霍尔电流互感器TA20-100测定,TA20-100变比为1000:1,输入电流为0-20A,输出电流为0-20mA,取样电阻为400Ω,则取样电压为0-8V,取样电压经过整流器整流,电阻分压限流后送入处理器,处理器通过AD转换得到当前电流大小。
1.2 晶闸管触发电路
闸管触发电路的作用是产生符合要求的门极触发脉冲,保证晶闸管在需要的时刻由阻断转为导通,如图7所示,由555多谐振荡电路、V1、V2、V3构成的脉冲放大环节以及脉冲变压器和附属电路构成的脉冲输出环节组成晶闸管触发电路。
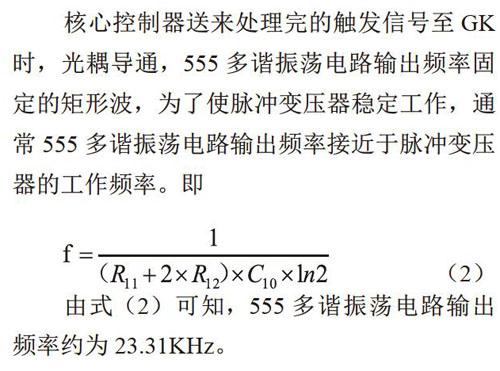
核心控制器送来处理完的触发信号至GK时,光耦导通,555多谐振荡电路输出频率固定的矩形波,为了使脉冲变压器稳定工作,通常555多谐振荡电路输出频率接近于脉冲变压器的工作频率。即
由式(2)可知,555多谐振荡电路输出频率约为23.31KHz。
2 软件的总体设计
软件整体的设计思想如图8所示,控制系统上电后对STM32F103C8T6和触摸屏初始化,核心控制板与触摸屏通信连接,之后STM32F103C8T6通过对供电电源的电压采样,计算是否处于正常工作电压。如果处于正常工作电压,接着核心控制块通过MODBUS协议读取触摸屏发来的数据判断是否开始,如果未开始,则继续等待;如果触摸屏点击开始,STM32F103C8T6判断设置的导通角、振打强度是否在正常范围内,如果超出正常范围,则发送数据至触摸屏触发报警文本,假如在正常范围内的话,则STM32F103C8T6将缓冲区的导通角、振打强度取出进行计算后输出一系列触发脉冲给驱动控制单元。
在输出触发脉冲给驱动控制单元的同时反馈采集系统开始工作,对一次电流进行采样整流分压后送入STM32F103C8T6,STM32F103C8T6对一次电流进行A/D轉换,并推算出电流是否超限,如果超限,则立即停止输出触发脉冲,防止晶闸管烧毁;如果电流处于正常范围,则继续工作,直至振打次数为零。
3 测试数据与分析
在测试完各个模块后,将整个系统组合在一起测试,控制系统整机装置如图9所示。
在整个测试中,参数均可通过触摸屏调整,当参数超出振打器能承受范围时,触摸屏显示报警文本,本控制系统可以根据使用现场的工况随时对高度进行设置,方便可靠。
智能振打控制系统的输出是由导通角和振打强度来决定的,在振打强度一定的时候,改变导通角,其输出的一次电流强度和高度随之变化,所有数据均采样五次取平均,振打强度为10时的实验数据如表1所示。
将表1数据用坐标系的形式来绘制出关系曲线,如图1。所示,由图可知,在导通角30°~90°时,高度值和导通角θ的曲线关系通过MATLAB拟合为函数y=-0.0002*x^3+0.0235*x^2+2.9194*x^1+-5.5201(其中x为导通角);在导通角90°~120°时,高度随导通角变化关系不明显。由此可知,在振打强度为10的时候,导通角30°~90°比较时候振打器稳定工作,高于90°,则振打高度变化微小,易造成晶闸管发热严重。
4 结论
该系统利用SCR控制技术来驱动振打器;单片机通过RS-485接口和触摸屏通信,可以实现远距离控制;在振打过程中,控制系统对整个过程当中的每个参量进行检测,一旦有指数超标,驱动单元即刻停止输出,同时显示报警文本告知差错原因。系统在传统工业中的电磁振打技术的基础上,结合人机界面及晶闸管控制技术,使整个控制达到智能化、可视化的操作流程和界面,在改变电磁振打的控制方式的同时,又提高了工作效率、降低了其生产成本,有利于增加其市场竞争力和易于市场推广。
(通讯作者:刘锡尧)
参考文献
[1]李刚,邹声华.翻车机粉尘治理研究与实践[J].环境工程,2008,26(05):25-27.
[2]王涌.电除尘器顶部振打控制系统研究[D].浙江:工业大学信息学院,2009.
[3]苏丽营.高压静电除尘在海带业中的应用研究[D].大连理工大学,2005.
[4]童长飞.单片机开发与C语言编程[M].北京:北京航空航天出版社,2005.
[5]孙立升.单相相控整流电路的应用[J].硅谷,2013,9:102-102.
[6]宋岩.ARM Cortex-M3权威指南[M].北京.北京航空航天大学出版社.2014.
[7]童诗白.模拟电子技术基础(第四版)[M].北京:高等教育出版社,2006.
猜你喜欢
防爆电机(2021年6期)2022-01-17
装备制造技术(2019年12期)2019-12-25
作文成功之路·小学版(2019年9期)2019-10-17
资源节约与环保(2018年1期)2018-02-08
中国资源综合利用(2016年11期)2016-01-22
浙江大学学报(工学版)(2015年2期)2015-05-30
发明与创新(2015年29期)2015-02-27
中国设备工程(2014年1期)2014-02-28
河南科技(2014年12期)2014-02-27
自动化与仪表(2014年10期)2014-02-26