自适应支撑式管道检测机器人的通过性设计
2018-03-04 09:58陈潇吴志鹏何思宇肖晓晖
中南大学学报(自然科学版) 2018年12期
陈潇,吴志鹏,何思宇,肖晓晖
自适应支撑式管道检测机器人的通过性设计
陈潇,吴志鹏,何思宇,肖晓晖
(武汉大学 动力与机械学院,湖北 武汉,430072)
针对电力和石油天然气领域中直径为250~350 mm管道的检测需求,设计自适应支撑式管道检测机器人,研究其在无障碍弯管与环形台阶障碍管环境下的管道通过性。首先分析管道特点,结合丝杠螺母和弹簧机构设计具有变径自适应能力的机器人行走机构;其次,建立机器人弯管运动学模型及环形台阶障碍动力学模型,进行管内运动的几何约束分析、速度协调分析和动力学分析;然后,在ADAMS中建立虚拟样机仿真平台,对机器人在弯管和环形台阶处的通过性进行仿真研究;最后,搭建机器人管道通过性试验平台进行实验验证。研究结果表明:在无障碍管和障碍管环境下,机器人运行平稳,能顺利通过;在通过弯管时,采用速度协调模型,可减少电机力矩和降低能量消耗;在跨越环形台阶障碍时,机器人电机力矩随台阶高度增大而增加,可通过不高于15 mm的环形台阶障碍。
管道机器人;通过性;ADAMS模拟;原型实验
目前,在电力、石油天然气等行业中,在役管道腐蚀、裂纹或凹陷等缺陷的检测中多采用人工检测方式,存在检测效率低、有检测盲区等问题。管道机器人替代人工对管道进行定期检测,能进入人所不及、复杂多变的管道环境,从而提高检测效率,降低人工作业的危险性[1]。国外对管道机器人的研究较多,如:ROH等[2−9]研制的天然气管道机器人MRINSPECT系列,采用差速驱动控制,能通过“T”型管道接头,但适应管径范围小,越障能力有限;KAKOGAWA等[10−11]研制的平行四边形机构管道检测机器人可通过变径接头及垂直管,但机器人转弯能力不足,适用于内径范围为136~226 mm的管道。国内对管道机器人的研究始于20世纪60年代,例如ZHANG等[12−13]研制了煤气管道检测机器人,该机器人能在上升倾斜角度为10°左右及转折角度较小的“Z”字形地下煤气管道运行平稳;唐德威等[14−16]研制的三轴差动式管道机器人,其驱动轮转速可随管道形状自动调节,并可沿弯管自主差速运行,但其越障高度有限,最大越障高度为 3.7 mm。在国内外管道机器人设计中,由于对弯道和管内障碍等限制性因素的考虑不足,机器人弯管转弯能力和越障能力较差。本文作者结合多种因素分析,针对电力和石油天然气领域中直径为250~350 mm的无障碍管和障碍管管道环境,提出了一种结合丝杆螺母和弹簧机构的自适应支撑式结构,以实现对复杂管道的适应性,同时利用ADAMS仿真并结合实验研究对机器人结构设计的合理性和管道通过性进行分析。
1 机器人自适应结构设计
1.1 运动需求分析
电力、石油天然气领域中直径为250~350 mm的管道环境可分为无障碍管和障碍管。无障碍管主要空间状态为弯管,弯管包括45°和90°弯管。障碍管常见状态为台阶、凸起和凹槽共3种,其中,台阶障碍为管道中最为常见的障碍[17−18],而环形台阶为台阶障碍的典型代表。
1.2 总体方案
采用模块化的设计思想,将机器人整体按功能划分为4个模块:自适应变径机构、行走机构、机身和支撑机构,如图1所示。
机器人机身主体轴线的周向120°均布3个履带足,每个履带足内置独立驱动电机,履带足通过铰链与支撑机构相连。自适应机构也内置1个预紧驱动电机,电机通过丝杆螺母机构作用于自适应机构中的预紧弹簧,实现履带足压紧管壁,从而使履带足和管壁间有足够的正压力,机器人能顺利前行。
1.3 自适应结构工作原理
自适应结构通过丝杆螺母机构的主动适应和弹簧的被动适应来实现履带足和管壁的正压力调节。管道机器人自适应结构示意图如图2所示,其中,滑块4内侧没有螺纹,因此,它只沿着丝杆做滑动;丝杆螺母3内侧有螺纹,因此,丝杆转动时将会带动螺母沿着丝杆向前或向后移动一定距离。
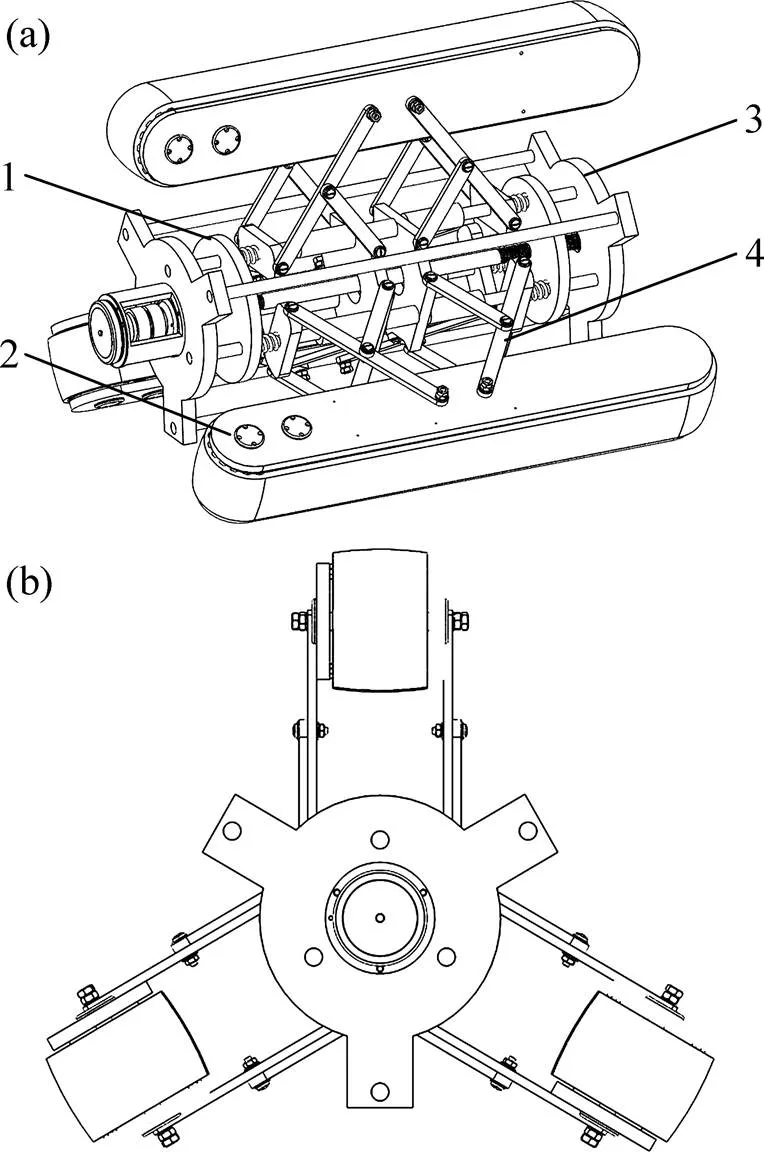
(a) 轴测图;(b) 后视图
1—丝杆;2—弹簧;3—丝杠螺母;4—滑块。
预紧驱动电机通过驱动丝杆螺母机构压缩预紧弹簧使其产生预紧力,预紧力通过滑块4作用于支撑机构,从而使履带足和管壁间产生一定的正压力。当机器人通过障碍或者变径管道时,通过紧贴在丝杆螺母上的环形压力传感器采集来自弹簧的压力信号,通过闭环控制调节自适应机构,使得履带足和管壁间的正压力保持在一定的范围内,从而使得机器人不会因正压力过小而脱离管壁或因正压力过大而难以行进。
2 管道通过性分析
2.1 无障碍管通过性分析
2.1.1 几何约束分析
在弯管中,将机器人简化为圆柱体,设圆柱体直径为,长度为,管道直径为,弯管曲率半径为,曲率中心为,在竖直投影方向,分析机器人在弯管中的几何约束条件,见图3。约束条件包括以下2种情况。
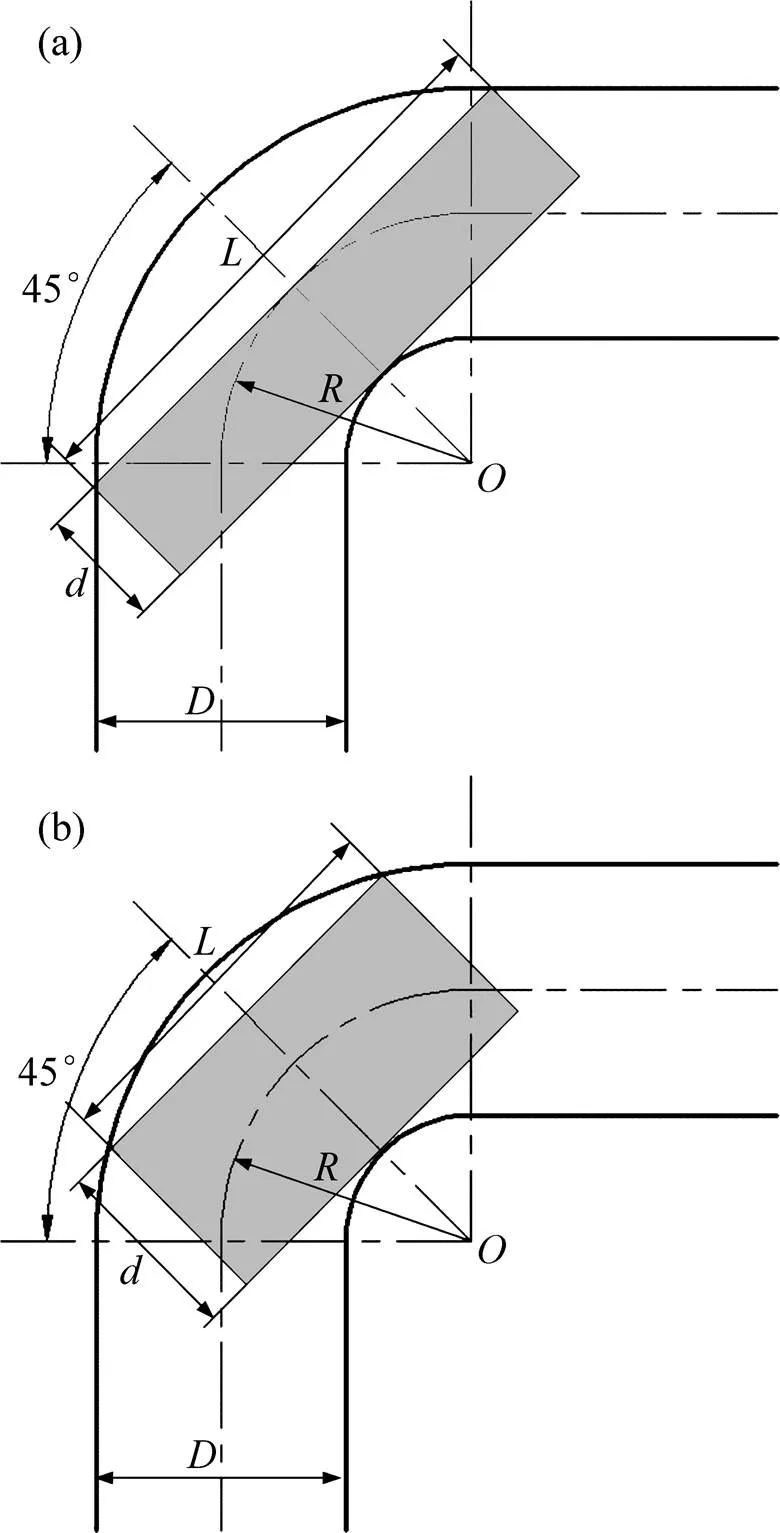
(a) 0<d<D/2;(b) D/2<d<D
1) 当0<</2,即机器人的直径小于管道半径时,直径应满足
式中,若=/2,如图3(a)所示,则有以下2种情况:
①当/=1.21时,机器人两端正好位于弯管与直管的交汇处,由几何关系可得max=2,其中,max表示管道机器人单元体能通过弯道的最大长度。
②当/<1.21时,机器人两端位于直管中,则

2) 当/2<<时,如图3(b)所示,

2.1.2 运动速度分析
从直管运动到弯管再到直管的过程中,管道机器人要经历过渡阶段和旋转阶段2种不同的运动状 态[19−20]。
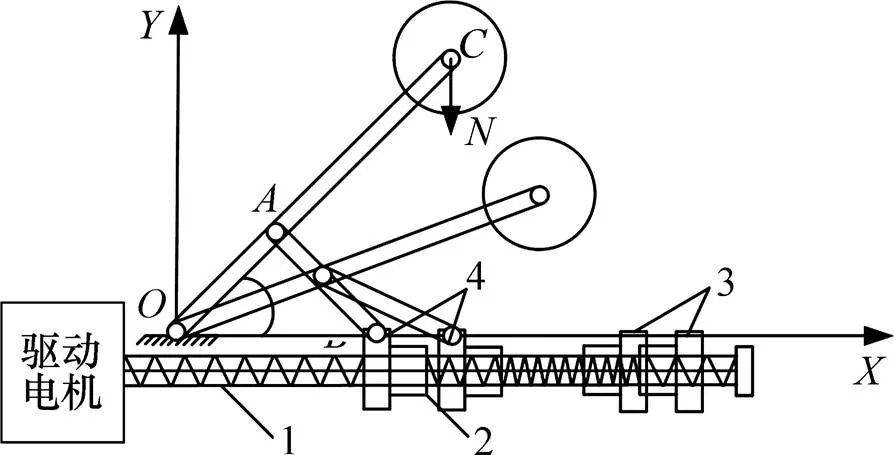
1) 过渡阶段。机器人过渡阶段的速度特征可用刚体平面运动来分析。机器人管道运动状态如图4(a)所示。机器人的空间坐标系为r−′′′。
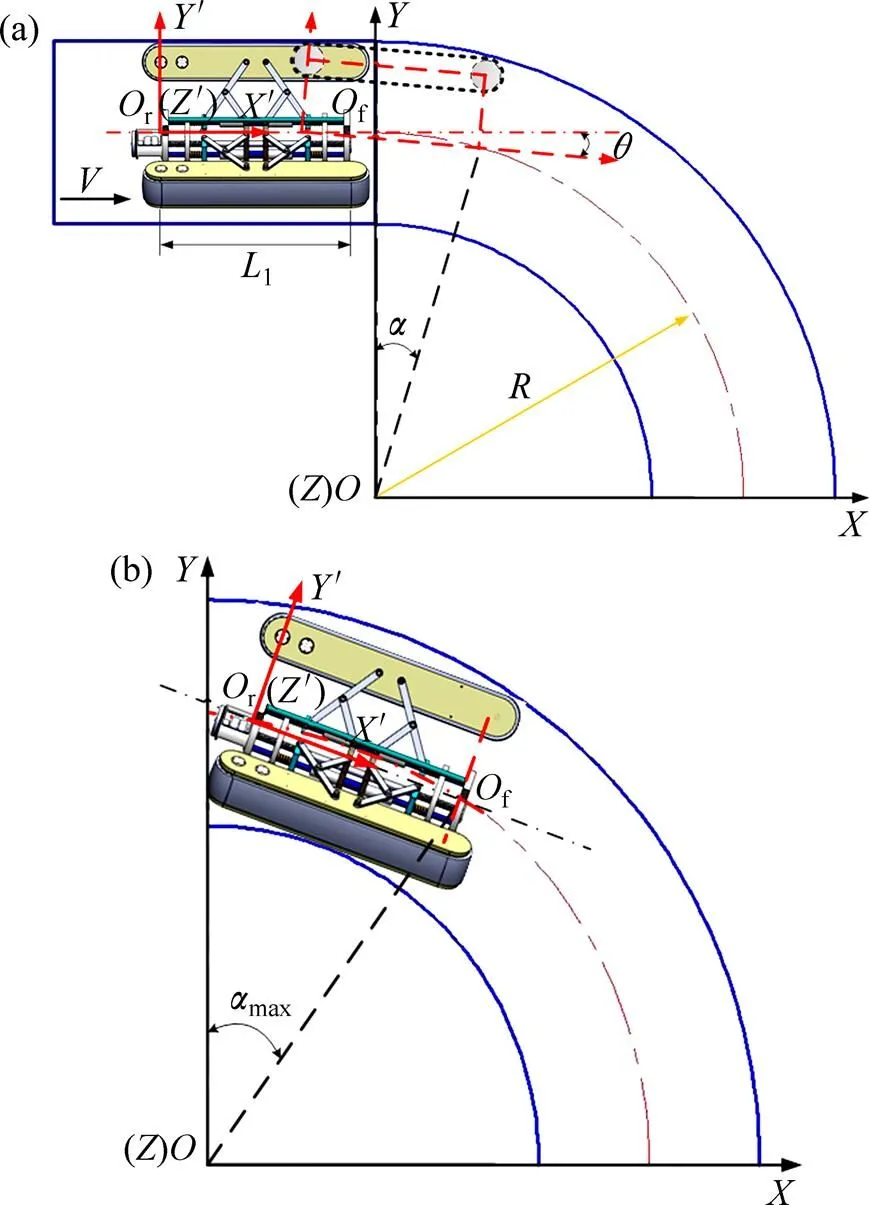
(a) 过渡阶段;(b) 旋转阶段
履带模块前后轮与管道内壁接触点坐标在机器人坐标系下的矩阵表示为:
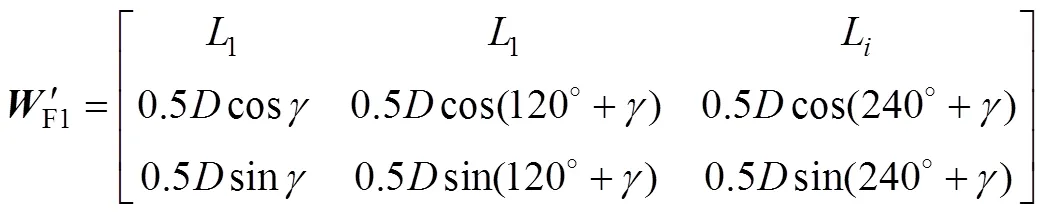
式中:1为履带模块前轮和后轮之间的长度;为进入弯管时的姿态角;为机器人前端面中心在弯管中转过的角度,即机器人的入弯角;为机器人坐标系旋转角度。
根据几何关系有

则机器人在过渡阶段的平移量为
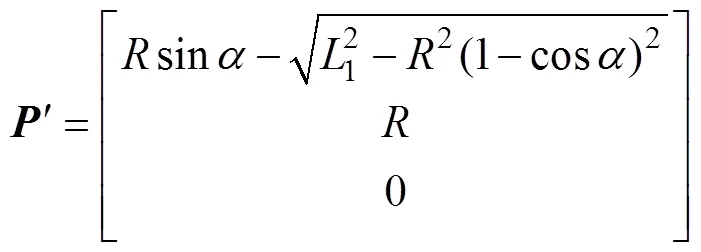
机器人履带模块前后轮与管道内壁接触点的坐标在管道坐标系下可表示为

式中:矩阵第1行表示前后轮与管道内壁接触点沿轴的速度分量,第2行表示前后轮与管道内壁接触点沿轴的速度分量。前后轮与管道内壁接触点的绝对速度为该点处轴与轴速度分量的合成,即
因此,为减少机器人在过渡阶段的内耗,应协调控制机器人前后轮间的速度,使其转速比为


本文机器人为履带式,前后轮速度相同,而前后轮与管壁接触点的速度差不为0[10],因此,会产生内耗。为减少内耗增加平稳度,机器人在过渡阶段应减速通过。
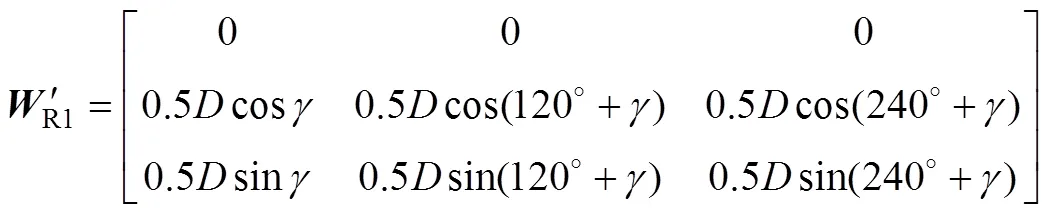
2) 旋转阶段。如图4(b)所示,机器人从过渡阶段进入旋转阶段后,履带模块前后轮的速度是相同的,机器人在此过程中不产生内耗。在旋转阶段,履带模块前后轮与弯管内壁接触点的坐标如下:
由于机器人绕轴转动,各个履带模块与弯管接触点的速度与对应的曲率半径成正比,因此,使各履带模块的转速之比等于对应曲率半径之比,就可以使机器人顺利通过。故机器人在旋转阶段的速度协调模型为

式中,1,2和3分别为3组履带模块的转速;1,2和3分别为3组履带模块与弯管接触点的旋转曲率半径。因履带为模块化结构,其传动机构的传动比相同,则按式(14)来协调控制3组履带模块的速度,机器人便能平稳、无内耗地通过旋转阶段。
2.2 障碍管通过性分析
针对以环形台阶为主的障碍管,选取机器人履带足前端刚刚碰到台阶边缘,即针对攀越台阶的时刻进行研究。
图5(a)所示为机器人在管道中的纵面受力,其中,机器人质心点位于管道的中心轴线,受到的重力为,3个履带足,和受到来自管壁的压力分别为N,N和N。图5(b)中,履带足前端为1,履带足后端为2。
由方向上受力平衡可知
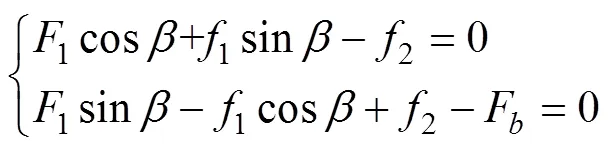
对履带足前端点1,由力矩平衡可知
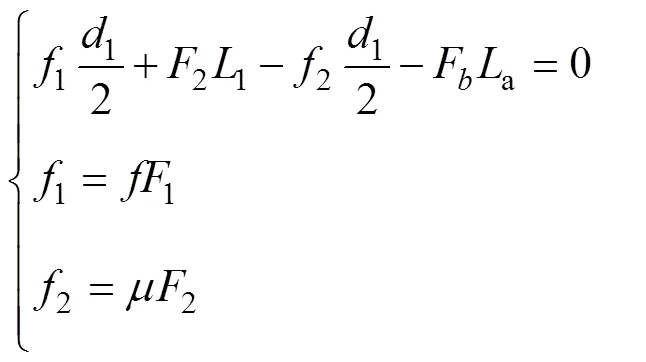
其中:1为台阶对履带足前端的反作用力;为管壁与履带足前端之间的滚动阻力系数;1为履带足前端受到的滚动阻力;2为管壁对履带足后端的反作用力;为滑动摩擦因数;2为履带足后端的摩擦力;b为履带足重力和机器人主体压紧力的合力;1为履带轮直径;为滚动阻力与竖直方向的夹角;a为履带前轮与机器人的质心距离。
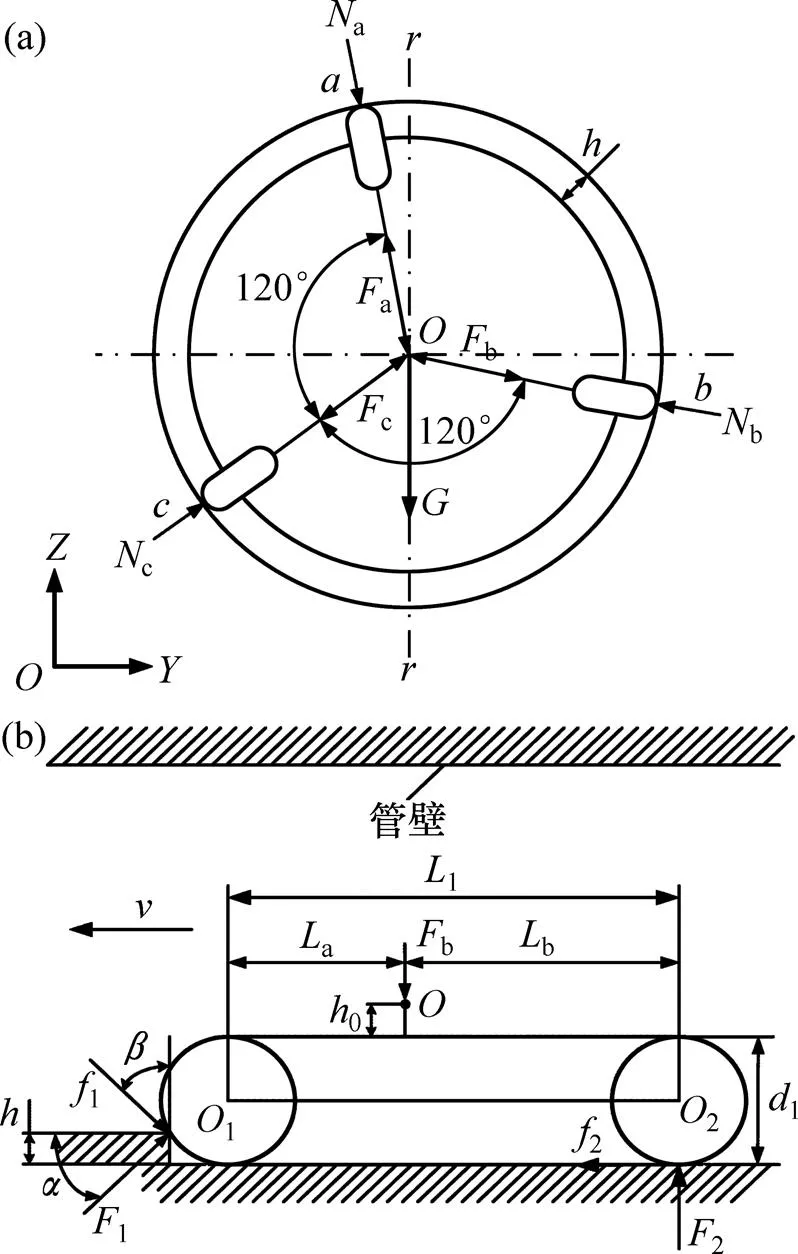
(a) 纵面受力图;(b) 攀越台阶受力图
联立式(15)和(16),将b,1,2消去得


由几何关系可得
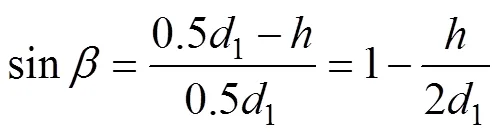
因履带足履带均采用硬质的橡胶材料,故可设滚动阻力系数≈0,可得
式中:为机器人能够越过的台阶高度。
3 通过性仿真研究
通过虚拟样机仿真软件ADAMS,对机器人在管道中的运动进行分析。采用Belt模块创建机器人履带,结合宏命令添加履带和管壁间接触力[21]。其中,机器人的主要参数如表1所示。
表1 机器人主要参数
3.1 无障碍管运行仿真
无障碍管主要由45°和90°弯管组成,弯管有水平和倾斜2种空间状态,因此,对水平45°和90°弯管及倾斜45°和90°弯管这4种情况进行仿真分析。在差速过弯时,过渡阶段减速通过,旋转阶段履带速度按式(14)所示的速度协调模型进行设置。
3.1.1 水平无障碍管
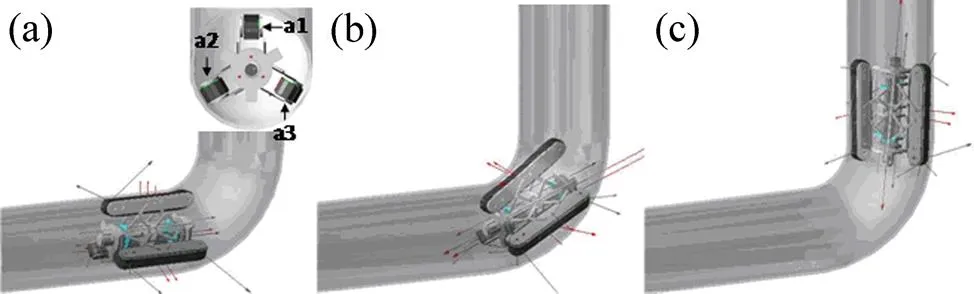
以水平90°弯管为例,机器人行走仿真如图6所示,以0°姿态角为起始状态进行仿真。
(a) 直管运动;(b) 弯管运动;(c) 直管运动
仿真过程中,对3个时间段中的3组履带T1,T2,T3通过step函数设置不同的速度。其中,在0~0.3 s,履带足撑紧管壁,施加给各个履带速度函数如表2 所示。
在水平45°弯管和90°弯管以速度协调模型进行差速仿真外,同时仿真机器人3个履带足以相同速度等速通过管道的情况,并进行对比分析。仿真中,机器人均可顺利通过弯管。如图7(a)所示,水平90°模型中,0~1.5 s和4.5~5 s为直管阶段,1.5~4.5 s为过弯阶段;水平45°模型中,0~1.5 s和3.2~5.0 s为直管阶段,1.5~3.2 s为过弯阶段。电机最大力矩均出现于过弯阶段,且随着弯管角度的增大而变大。由图7(b)和(c)可知:机器人等速过弯时,由于过渡阶段未减速,因此,最大力矩出现时间均比差速模型出现的时间早,最大力矩和能量消耗相对于差速模型显著增大。水平无障碍管机器人及力矩如表3所示。可见:水平90°差速模型相对于其等速模型最大力矩降低22.6%,能量消耗降低25.9%;水平45°差速模型相对于其等速模型最大力矩降低22.8%,能量消耗降低44.1%。
表2 水平90°弯管step速度
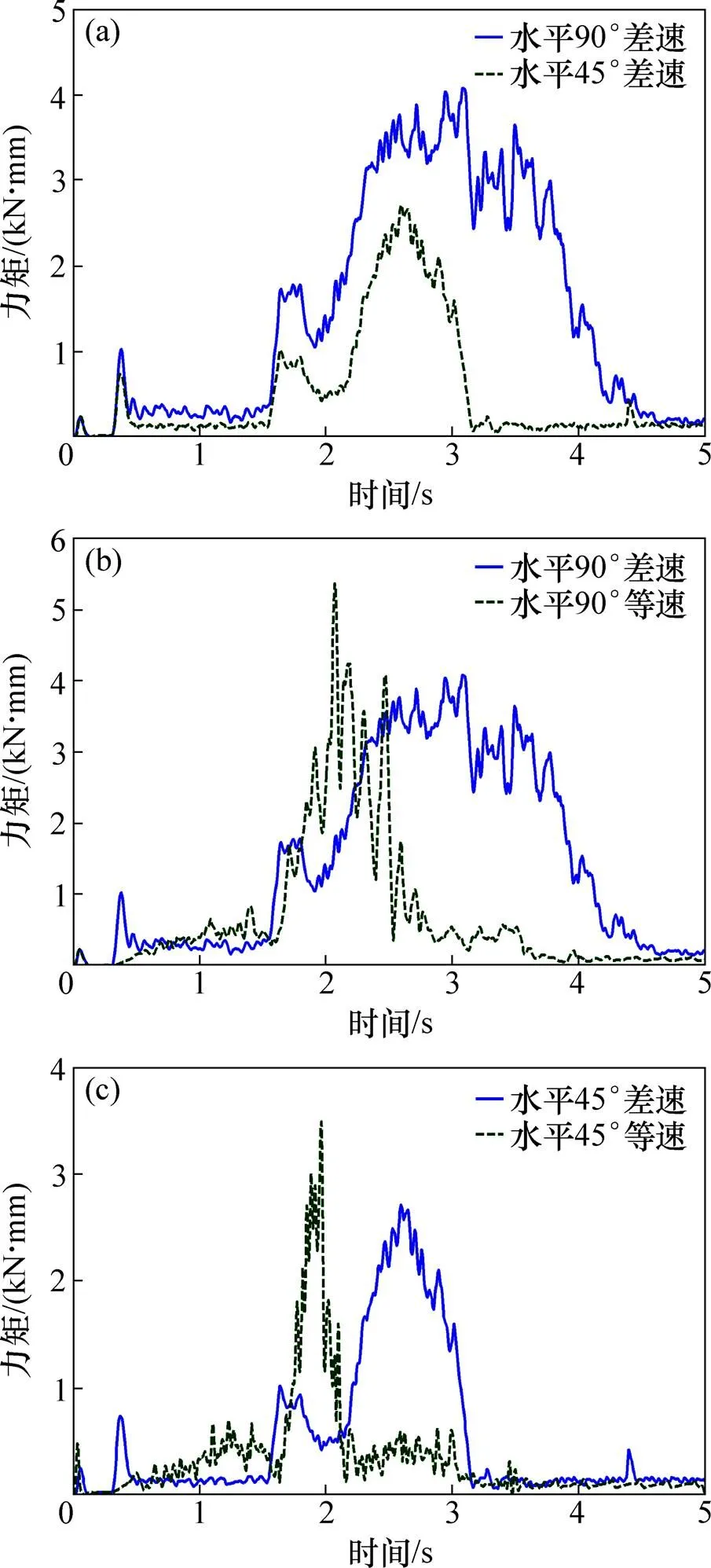
(a) 水平90°差速和45°差速;(b) 水平90°差速和90°等速;(c) 水平45°差速和45°等速
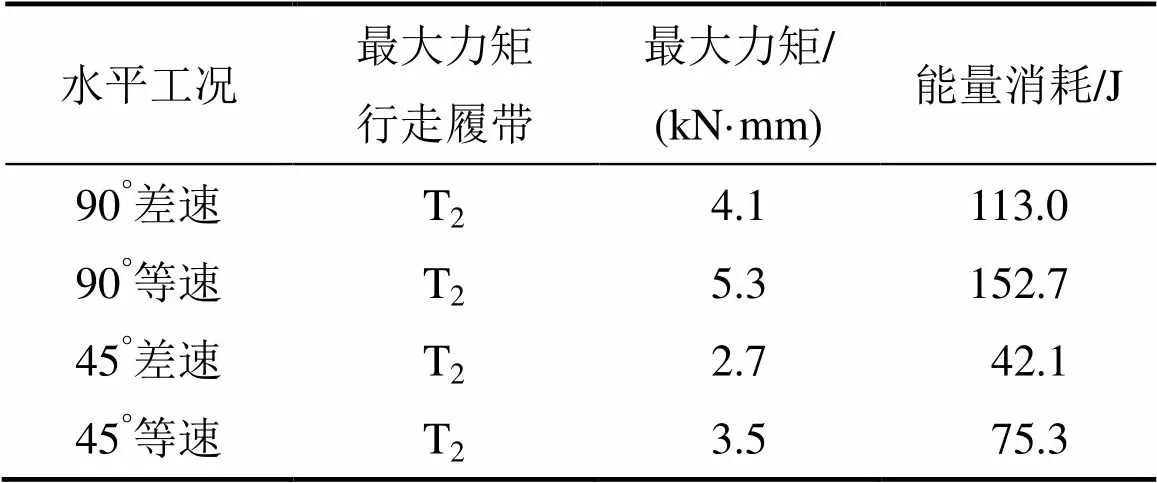
表3 水平无障碍管机器人力矩及能耗
3.1.2 倾斜无障碍管
以倾斜90°弯管为例,其行走仿真如图8所示。机器人起始状态为0°姿态角。
(a) 直管运动;(b) 弯管运动;(c) 直管运动
与水平无障碍管类似,通过设置step函数,仿真机器人在倾斜45°和90°弯管时差速与等速的不同工况,得到图9所示的倾斜无障碍管仿真曲线。
倾斜90°模型中,0~1.5 s和4.0~5.0 s分别为水平直管和竖直管阶段,1.5~4.0 s为过弯阶段;倾斜45°模型中,0~1.5 s和3.2~5.0 s分别为水平直管阶段与倾斜管阶段,1.5~3.2 s为过弯阶段。与水平障碍管相同,电机最大力矩均出现于弯管阶段,且随着弯管角度的增大而变大。倾斜无障碍管机器人力矩及能耗如表4所示。从表4可见:相对于倾斜90°等速模型,差速模型最大力矩降低32.9%,能量消耗降低70.4%;相对于倾斜45°等速模型差速模型最大力矩降低24%,能量消耗降低62.2%。
3.2 障碍管运行仿真
不同台阶高度的力矩曲线如图10所示。在机器人前进的路径处,建立一定高度的环形障碍,不断增加障碍物的高度,直到机器人无法越过障碍为止,此时,障碍高度即为机器人的最大越障高度。
履带轮直径1=60 mm,滑动摩擦因数=0.85,履带前轮与机器人质心距离a=277.5 mm,代入式(19)可得理论最大跨越台阶高度=15.1 mm。如图10所示,10,15和20 mm高台阶下电机的最大力矩分别为1.49,2.16和4.35 kN∙mm,均出现在2.7 s处,此时刻为履带足攀爬台阶的瞬间。仿真中,机器人可顺利通过10 mm和15 mm高台阶,电机力矩随台阶高度的增大而增加。20 mm高台阶环境下,机器人在3 s后力矩出现往复波动,机器人无法通过台阶障碍,与理论预期结果一致。
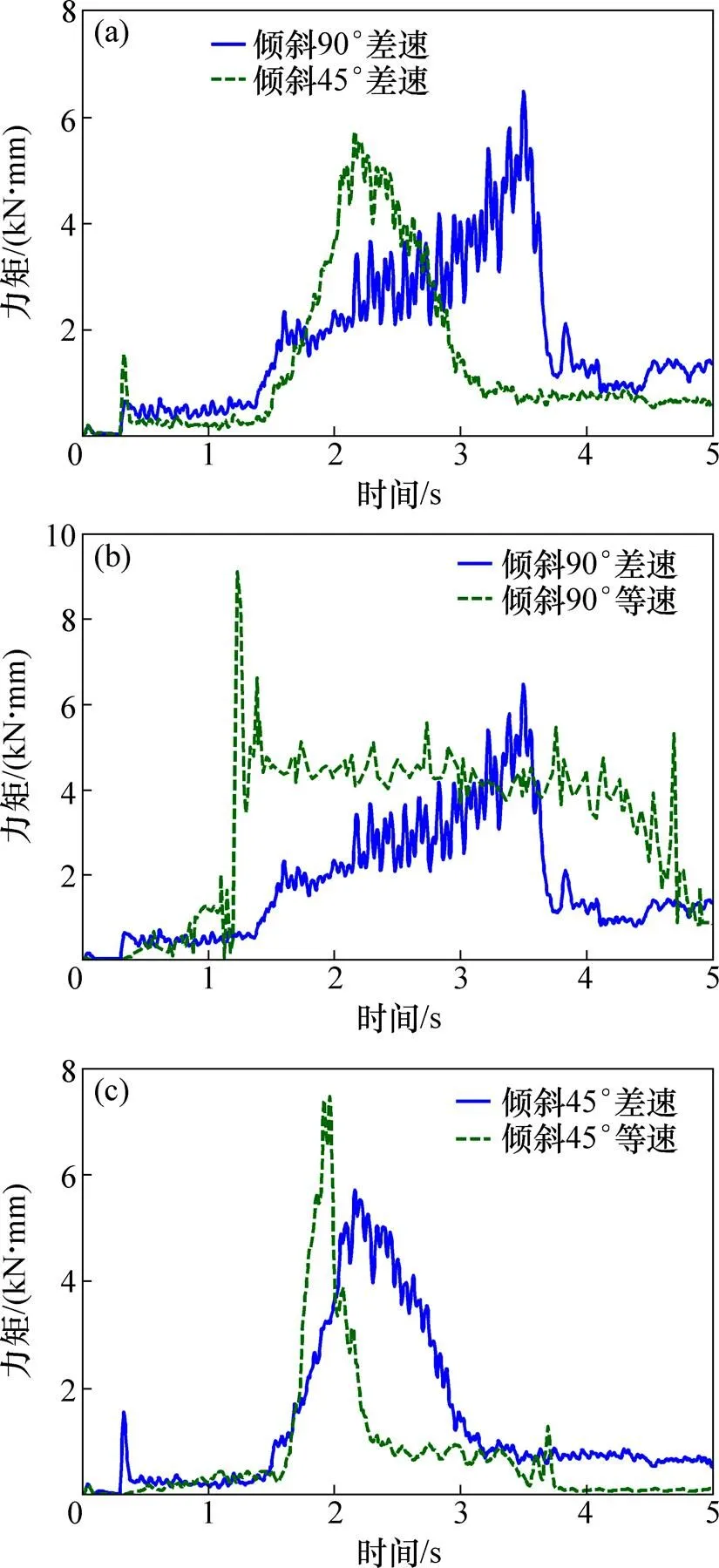
(a) 倾斜90°差速和45°差速;(b) 倾斜90°差速和90°等速;(c) 倾斜45°差速和45°等速
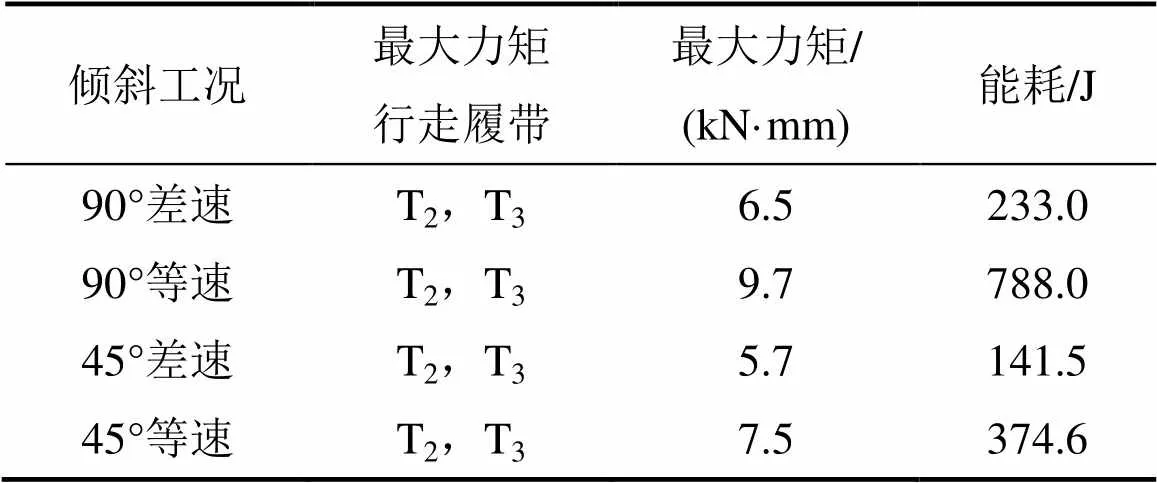
表4 倾斜无障碍管机器人力矩及能耗
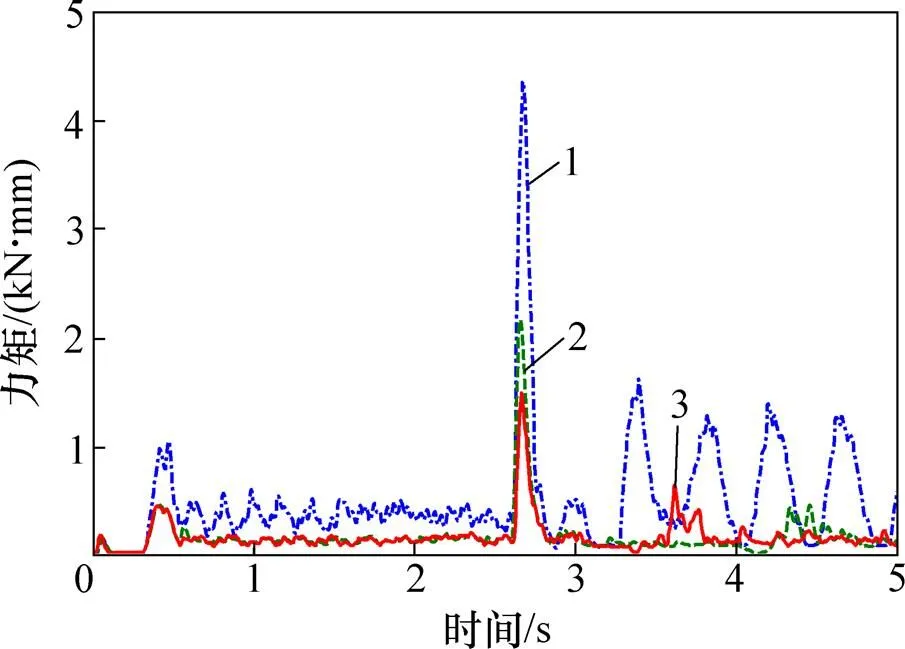
台阶高度/mm:1—20;2—15;3—10。
4 实验验证
4.1 控制系统设计
自适应支撑式管道检测机器人的控制系统主要由上位机、中央控制单元、传感器和驱动器组成。图11所示为机器人控制系统结构图。其中,上位机模块通过TCP/IP协议与Single-Board RIO9637进行通信连接完成初始化等控制指令的传输,Single-Board RIO9637通过CAN总线输出控制指令控制驱动器执行电机驱动,同时,传感器感知机器人运行状态和周围环境,通过RS-232总线接收传感器模块返回的传感器信息,再通过RS-232总线转CAN模块将信息通过CAN总线整体反馈给控制系统,进行相应处理并调节电机输出,从而实现机器人在管内的有效运动控制。
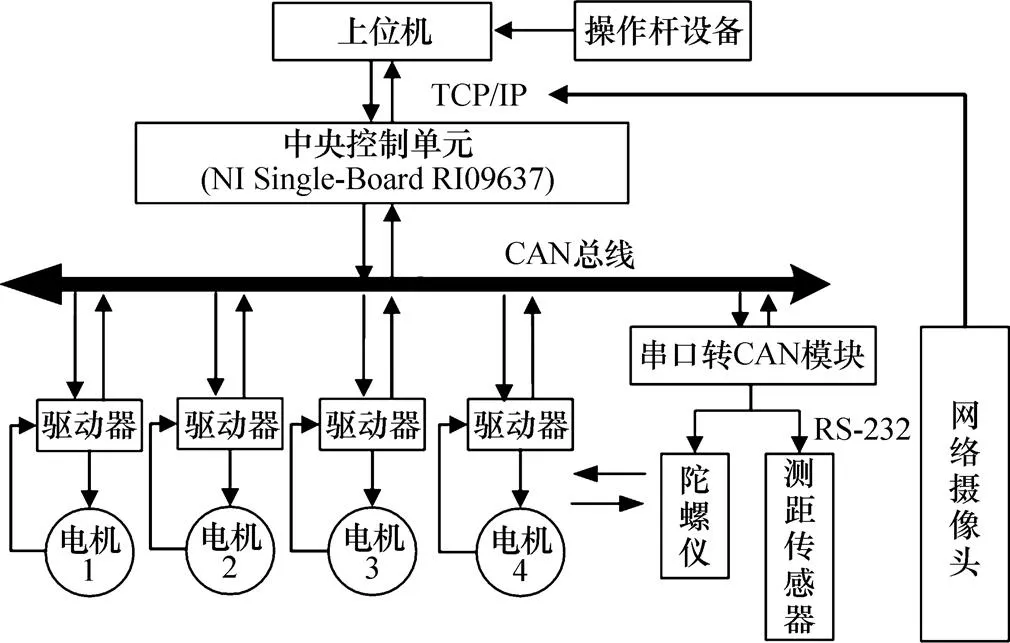
图11 管道机器人控制系统结构
配合控制系统的设计,开发了机器人的控制软件,如图12所示,机器人控制软件系统采用LabVIEW开发环境,分为控制面板和显示面板2个部分。控制面板用于向机器人发送速度电流等控制指令;显示面板用于显示机器人状态信息,如编码器反馈的电机的速度、陀螺仪反馈的姿态信息、摄像头反馈的视频信息等。

图12 管道机器人控制软件界面
4.2 无障碍管实验
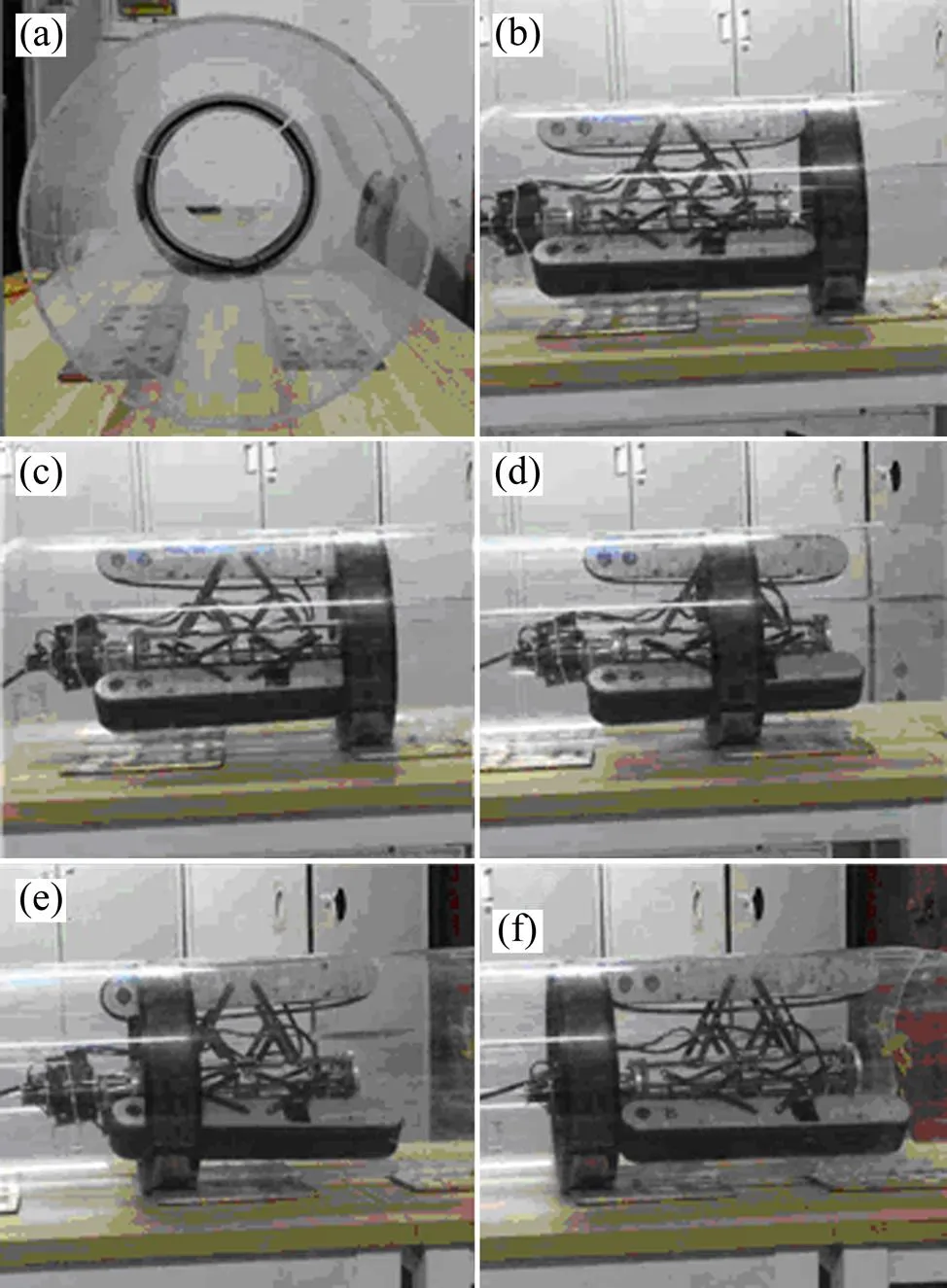
本文将选用无障碍管中的典型水平90°弯管,验证机器人的管道通过性能。图13所示为机器人在水平90°弯管的行走过程。
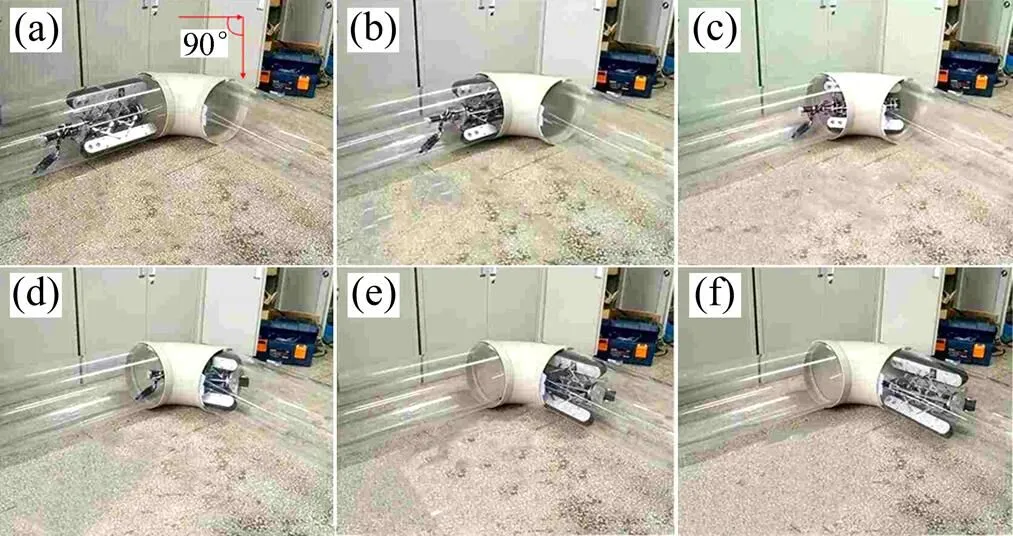
(a) 直管阶段;(b) 过渡阶段;(c),(d) 旋转阶段;(e) 过渡阶段;(f) 直管阶段
在试验过程中,机器人各个阶段速度设置如表5所示。
试验中机器人顺利通过弯管。机器人履带足电机电流如图14所示,图中,0~0.5 s,2.5~5.0 s为直管阶段,0.5~2.5 s为弯管阶段。其中电机输出扭矩与电流成正比,由图14可知:机器人从直管进入弯管管道后,电流逐渐增加;在弯管中间阶段,电流达到峰值,对应电机扭矩达到峰值,与仿真结果相符。
4.3 障碍管实验
本文选用障碍管中的典型环形台阶障碍,验证管内机器人的管道通过性能。图15所示为机器人越障试验过程。
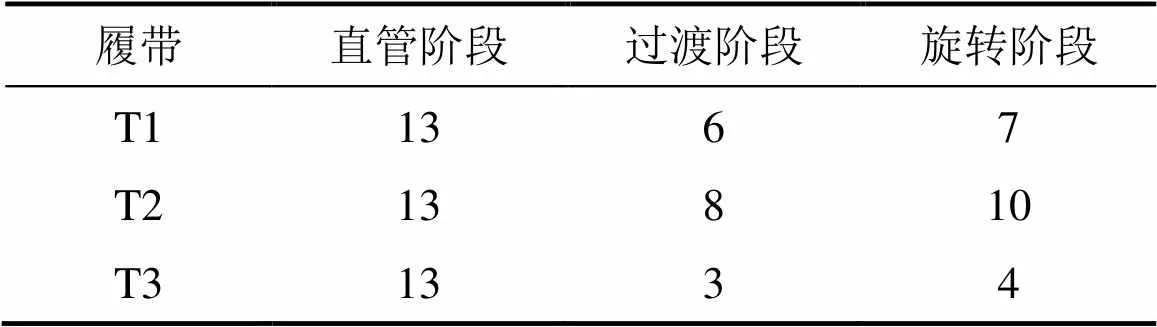
表5 机器人速度配置
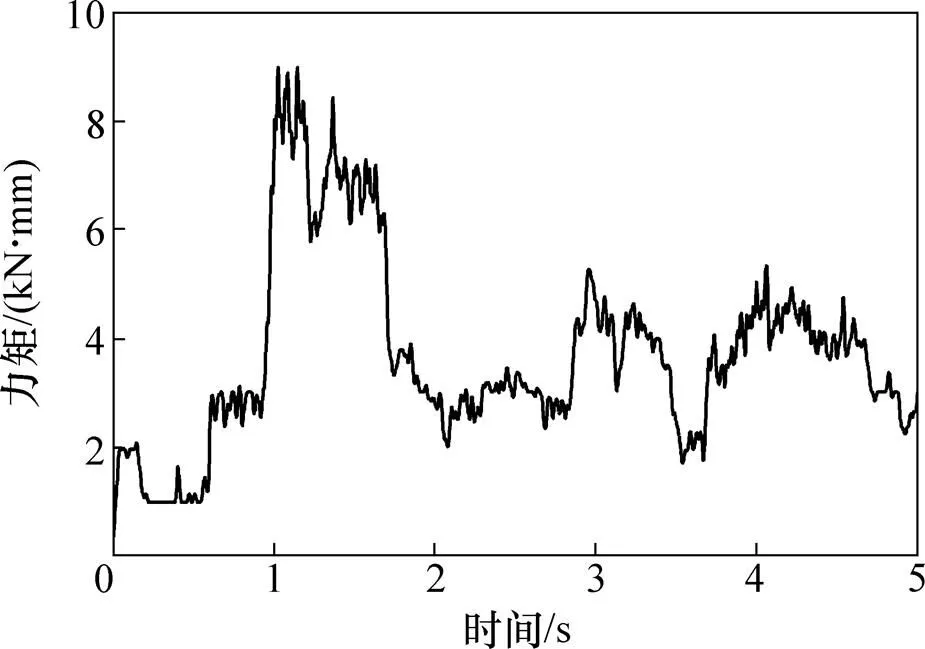
图14 机器人履带足电机电流
(a) 试验管道;(b) 机器人接近障碍;(c)~(e) 机器人穿越障碍;(f) 机器人远离障碍
由图15可知,2~4 s为越障过程,此间电机电流在=3 s处达到峰值,对应电机扭矩达到峰值,与仿真结果相符。机器人跨越障碍的能力如表6所示。
由表6可知,机器人可通过10 mm和15 mm高环形台阶,无法通过20 mm高台阶,与仿真结果相符。
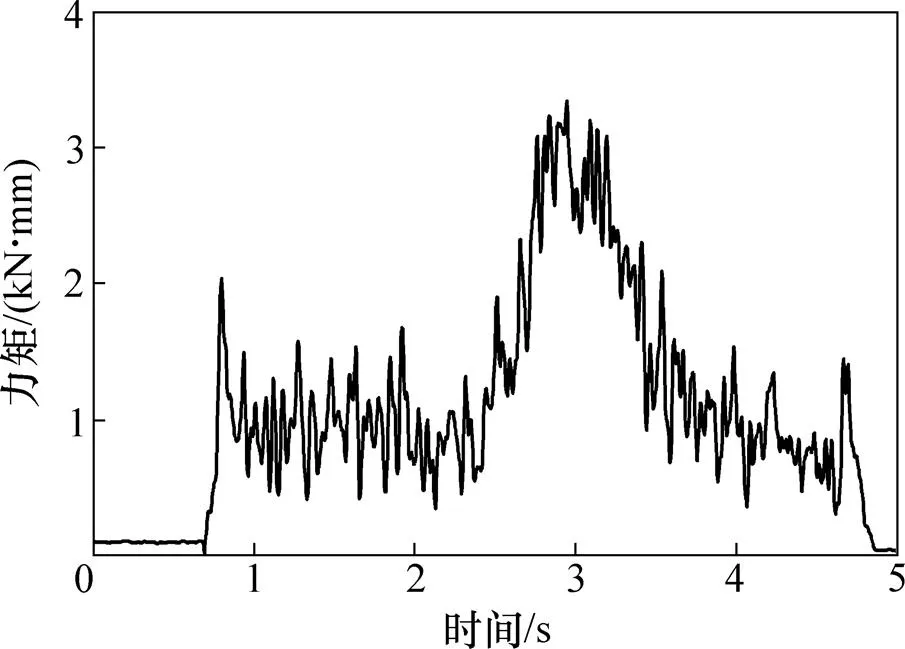
图16 15 mm高台阶电机电流
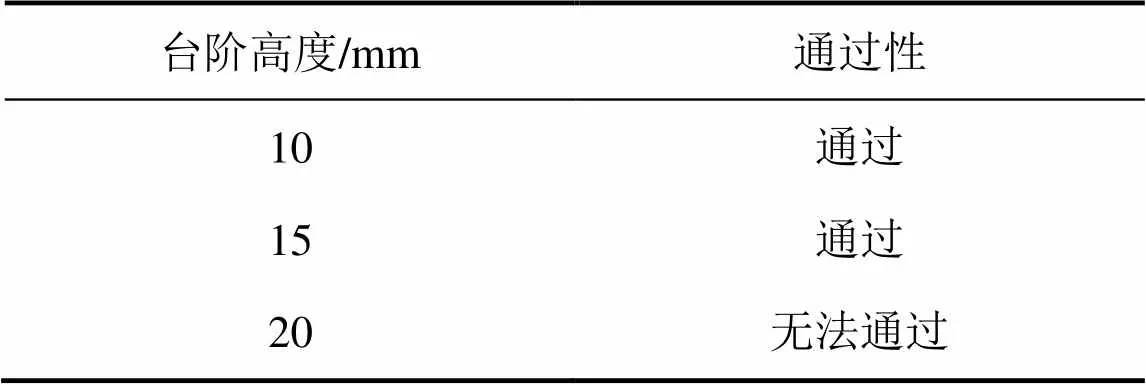
表6 机器人越障能力
5 结论
1) 针对电力和石油天然气领域中常见的内径为250~350 mm的管道,提出了一种适应管道内径变化、具有良好的弯管通过性和越障能力的自适应支撑履带式管道机器人。
2) 机器人通过弯管管道时,样机速度按照速度协调模型设置,可顺利通过弯管,同时可大幅度减少电机力矩,降低能量消耗。其中,水平90°弯管最大力矩降低22.6%,能量消耗降低25.9%;水平45°弯管最大力矩降低22.8%,能量消耗降低44.1%;倾斜90°最大力矩降低32.9%,能量消耗降低70.4%;倾斜45°最大力矩降低24%,能量消耗降低62.2%;过障碍管时,机器人能通过不高于15 mm的障碍高度,符合理论预期结果。
3) 在无障碍管和障碍管环境条件下,机器人实际转矩小于电机最大转矩,机器人运行平稳,能顺利通过管道。
[1] 王永雄. 管道机器人控制、导航和管道检测技术研究[D]. 上海: 上海交通大学电子信息与电气工程学院, 2012: 1−10. WANG Yongxiong. Research on control, navigation and pipeline inspection technology of pipeline robot[D]. Shanghai: Shanghai Jiao Tong University. School of Electronics and Electric Engineering, 2012: 1−10.
[2] ROH S G, CHOI H R. Differential-drive in-pipe robot for moving inside urban gas pipelines[J]. IEEE Transactions on Robotics, 2005, 21(1): 1−17.
[3] ROH S, KIM D W, LEE J S, et al. Modularized in-pipe robot capable of selective navigation inside of pipelines[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems, Piscataway: IEEE, 2008: 1724−1729.
[4] ROH S, LEE J S, MOON H, et al. In-pipe robot based on selective d rive mechanism[J]. International Journal of Control, Automation and Systems, 2009, 7(1): 105−112.
[5] YANG S U, KIM H M, SUH J S, et al. Novel robot mechanism capable of 3D differential driving inside pipelines[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 1944−1949.
[6] KIM H M, YUN S C, LEE Y G, et al. Novel Mechanism for In-pipe Robot Based on Multi-axial Differential Gear Mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2016(99): 1.
[7] KIM H M, CHOI Y S, MUN H M, et al. 2-2D differential gear mechanism for robot moving inside pipelines[C]// IEEE/RSJ International Conference on Intelligent Robots & Systems. Piscataway, NJ: IEEE, 2015:1152−1157.
[8] CHOI Y S, KIM H M, MUN H M, et al. Recognition of pipeline geometry by using monocular camera and PSD sensors[J]. Intelligent Service Robotics, 2017, 10(3): 213−227.
[9] KIM H M, SUH J S, CHOI Y S, et al. An In-pipe robot with multi-axial differential gear mechanism[C]//IEEE/RSJ International Conference on Intelligent Robots & Systems. Piscataway, NJ: IEEE, 2013:252−257.
[10] KAKOGAWA A, MA S, HIROSE S. An in-pipe robot with underactuated parallelogram crawler modules[C]//IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2014: 1687−1692.
[11] KAKOGAWA A, MA S. Speed analysis for three driving modules of an in-pipe inspection robots for passing through bent pipes[C]//IEEE International Conference on Robotics and Biomimetics. Piscataway: IEEE, 2015: 1731−1736.
[12] ZHANG Y, YAN G. In-pipe inspection robot with active pipe-diameter adaptability and automatic tractive force adjusting[J]. Mechanism & Machine Theory, 2007, 42(12): 1618−1631.
[13] 张云伟. 煤气管道检测机器人系统及其运动控制技术研究[D].上海: 上海交通大学电子信息与电气工程学院, 2007: 39−127. ZHANG Yunwei. Research on gas pipeline inspection robot system and its motion control technology[D]. Shanghai: Shanghai Jiao Tong University. School of Electronic and Electric Engineering, 2007: 39−127.
[14] 唐德威, 李庆凯, 梁涛, 等. 三轴差动式管道机器人机械自适应驱动技术[J]. 机械工程学报, 2008(9): 128−133. TANG Dewei, LI Qingkai, LIANG Tao, et al. Mechanical adaptive driving technology of three axis differential pipe robot[J]. Journal of Mechanical Engineering, 2008(9): 128−133.
[15] 张学文, 邓宗全, 贾亚洲, 等. 管道机器人三轴差动式驱动单元的设计研究[J]. 机器人, 2008, 30(1): 22−28. ZHANG Xuewen, DENG Zongquan, JIA Yazhou, et al. Design and study of three axis differential drive unit for pipeline robot[J]. Robot, 2008, 30(1): 22−28.
[16] 李庆凯. 三轴差速式管道机器人驱动单元的设计与研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2008: 11−53. LI Qingkai. Design and research on driving unit of three axis differential pipeline robot[D]. Harbin: Harbin Institute of Technology. School of Mechatronic Engineering, 2008: 11−53.
[17] 陈宗尧, 颜国正, 王坤东, 等. 关节履带式管道检测机器人越障性能优化[J]. 上海交通大学学报, 2011, 45(7): 1017−1020. CHEN Zongyao, YAN Guozheng, WANG Kundong, et al. Optimization of obstacle performance for joint crawler pipeline detection robot[J]. Journal of Shanghai Jiao Tong University, 2011, 45(7): 1017−1020.
[18] 庄皓岚, 颜国正, 王志武, 等. 多节履带式机器人系统组成和越障性能研究[J]. 测控技术, 2013, 32(8): 59−62. ZHUANG Haolan, YAN Guozheng, WANG Zhiwu, et al. Research on the system composition and obstacle avoidance performance of multi section crawler robot[J]. Measurement and Control Technology, 2013, 32(8): 59−62.
[19] 胡文君, 李著信, 苏毅, 等. 管道机器人在三通处的通过性分析[J]. 后勤工程学院学报, 2005, 21(3): 49−53. HU Wenjun, LI Zhuxin, SU Yi, et al. Analysis of pipeline robot passing through three links[J]. Journal of Logistical Engineering College, 2005, 21(3): 49−53.
[20] 许冯平, 邓宗全. 管道机器人在弯道处通过性的研究[J]. 机器人, 2004, 26(2): 155−160. XU Fengping, DENG Zongquan. Research on pipeline robot passing through bend[J]. Robot, 2004, 26(2): 155−160.
[21] 刘晋霞, 胡仁喜, 康士廷, 等. ADAMS 2012 虚拟样机从入门到精通[M]. 2版. 北京: 机械工业出版社, 2013. LIU Jinxia, HU Renxi, KANG Shiting, et al. ADAMS 2012 virtual prototyping, from entry to mastery[M]. 2nd ed. Beijing: Mechanical Industry Press, 2013.
Passing property design of adaptive support pipeline detection robot
CHEN Xiao, WU Zhipeng, HE Siyu, XIAO Xiaohui
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
In order to meet the detection requirements for pipelines with diameter of 250−350 mm in the field of power, oil and gas, an adaptive support pipeline inspection robot was designed to study the pipeline passing property in barrier free elbow and ring step obstacle pipe. Firstly, the characteristics of the pipeline were analyzed, and the robot walking mechanism with variable diameter adaptive ability was designed with the screw nut and spring mechanism. Secondly, the kinematic model in elbow and the dynamic model in the ring step obstacle of the robot were established. The geometric constraint analysis, velocity coordination analysis and dynamics analysis of the robot in-pipe motion were carried out. Then, the virtual prototype simulation platform was established in ADAMS, and the simulation of the robot’s passing property in the elbow and ring step pipe was carried out. Finally, the robot pipeline test platform was built and passing property was verified by experiments. The results show that the robot passes smoothly through the pipe with and without barrier. When the robot passes through the elbow, the motor torque and the energy consumption are reduced by speed coordination model. When the robot crosses a ring step obstacle, the torque of the robot increases with the increase of the step height, and robot can pass through the ring step obstacle of no more than 15 mm in height.
pipeline robot; passing property; ADAMS simulation; prototype experiment
10.11817/j.issn.1672−7207.2018.12.008
TP242.2
A
1672−7207(2018)12−2953−10
2017−12−07;
2018−03−11
国家自然科学基金资助项目(51675385)(Project(51675385) supported by the National Natural Science Foundation of China)
肖晓晖,博士,教授,从事特种机器人与微操作机器人研究;E-mail:xhxiao@whu.edu.cn
(编辑 赵俊)
猜你喜欢
兵器装备工程学报(2021年3期)2021-04-09
河南科技(2018年3期)2018-09-10
河南科技(2018年9期)2018-09-10
河南科技(2018年3期)2018-09-10
河南科技(2018年12期)2018-09-10
劳动保护(2018年5期)2018-06-05
数学大王·低年级(2017年9期)2017-09-18
小说月刊(2015年11期)2015-04-23
科技视界(2014年6期)2014-12-24
坦克装甲车辆(2000年6期)2000-06-13