面向隧道视觉检测的多轴调焦机构设计
2018-03-06 08:14刘晓
筑路机械与施工机械化 2018年1期
刘 晓
(山西省交通科学研究院山西省公路智能监测工程技术研究中心,山西太原 030006)
0 引言
基于视觉的隧道快速检测系统是获取隧道病害信息的重要手段之一[1-4],其核心任务是高质量的获取目标区域的衬砌图像。但是,由于光学系统对光照强度要求较高[5-6],各隧道断面尺寸不同,并且在行车过程中,车辆运动产生的振动、颠簸以及轨迹变化将导致相机CCD靶面偏离焦平面[7-9],从而降低成像分辨率,影响图像采集质量。为了提高隧道快速检测系统的适应性,同时得到高质量的隧道衬砌图像[10],需要在隧道视觉检测系统中设计调焦机构,以补偿由于外界环境变化引起的离焦问题。
本文以提高隧道图像采集质量为出发点,分析引起隧道成像离焦的主要因素,提出提升图像采集质量的措施,确定调焦方案,并设计一种应用于公路隧道视觉检测的多自由度调节机构。在此基础上,分析该调节机构工作原理,并着重给出了主要零部件的设计方法。
1 调焦方案的确定
1.1 引起离焦的主要因素
公路隧道内部光照强度有限,视觉采集系统对外界环境的适应性降低。由于隧道断面尺寸不同、行车轨迹不确定、外界多维扰动等原因,都会导致相机拍摄距离变化,使隧道衬砌面位于数字相机、激光光源等视觉采集设备最佳工作范围之外。
1.1.1 隧道断面尺寸对图像采集质量的影响
隧道标准内轮廓断面由起拱线高度、拱部圆弧半径等参数描述,依据《公路隧道设计规范》(JTG D70—2004),高速公路隧道以双洞单向两车道为主,设计时速有 60、80、100、120 km·h-1,分别对应不同的建筑限界横断面。4种公路等级对应的起拱线高度分别为 6.74、7.03、7.31、7.72 m,对应的拱部圆弧半径分别为 5.14、5.43、5.7、6.12 m。
以 60 km·h-1和 120 km·h-1的隧道为例,同一位置处拍摄距离相差1 m左右,特别是对于单向三车道的大断面公路隧道,起拱线高度约8.9 m、拱部圆弧半径约7.4 m,同一位置处的差距更大,达到2 m以上。
1.1.2 行车轨迹对图像采集质量的影响
车辆在隧道中按正常车速行驶时,速度约20 m·s-1。经试验测试表明,受驾驶员驾驶习惯、路面颠簸、周围车流量等影响[11-13],车辆行驶过程中沿车道横向偏移量为±0.5 m,这将导致拍摄距离最远相差±0.7 m。
由以上分析可知,多种因素导致数字相机、激光光源等视觉采集设备与被测物之间距离波动范围为±1 m,致使被测物处于光源最佳照射和相机焦距范围外,从而降低成像分辨率,甚至无法获取图像,严重影响后期图像自动处理与病害识别。
1.2 提升图像采集质量的措施
隧道视觉采集系统的光学元器件主要有数字相机和激光光源,都通过光学方法进行调焦提升图像采集质量。该方法的基本原理是通过移动光学镜头中的透镜改变焦距,或是通过调整遥感器焦面的位置进行调焦,从而调整数字相机至最佳拍摄距离或激光光源至最佳照射距离。
本文所述的隧道快速检测系统,当应用于断面尺寸不同的隧道时,在检测工作前需要根据断面尺寸调整相机和激光光源的各光学参数。由于光学系统配套复杂的机械固定装置,因此调整起来非常困难。特别是行车轨迹对图像采集质量的影响,这种影响是行车过程随机产生的,通过调节光学系统参数无法满足实时性及功能性要求。综合考虑上述原因,为使隧道快速检测系统总体结构更加合理,调焦方式更加方便,本系统采用一套多自由度调节机构[14],实时检测光学系统与隧道衬砌之间的距离,通过机械方法间接调整光学系统参数,从而达到快速调焦的目的。
1.3 调焦方案的确定
通过机械方法调焦的原理为,通过一套多轴调整机构,实时调节各相机与隧道衬砌间的距离,同时为了保证相机调整距离后,能够采用最佳姿态拍摄断面,因此还需要设计可调整各相机姿态角的装置。考虑到检测系统对该调整机构占用空间进行了严格约束,因此拟采用伺服电机、电动缸方案实现单组相机、光源沿隧道衬砌方向的位移调节;采用电机、回转驱动方案实现单组相机、光源的转角调节,使其轴线始终与拍摄面法线平行。图1为所述多轴调节机构三维示意,该机构具有一个十自由度的机械手,以电动缸及回转驱动处电机作为系统输入,多组视觉采集设备沿其导轨方向移动和绕其安装面旋转运动为系统输出,在伺服电机作用下,视觉采集设备运动至指定的空间位置和姿态。

图1 多轴调节执行机构
2 调整机构设计
2.1 工作原理
以设计时速为80 km·h-1的双车道隧道为基准,确定各组相机及激光光源的视场角、焦距、景深和扩散角等参数。车辆行驶过程中,激光三维扫描仪实时采集隧道断面尺寸,获得关于隧道断面的三维点云数据,同时根据激光三维扫描仪中心点所在位置获得车辆偏移数据。在上述数据采集、计算结果的基础上,依据数字相机视场角、待检隧道圆弧长以及相邻两组相机拍摄图片的重叠率这3个参数,获得每组相机调姿角,即回转驱动的转动角度。判断各组视觉采集设备与待检隧道衬砌表面之间的距离,并与数字相机的景深作对比,如果在数字相机和激光光源景深范围内,就无需调整视觉采集设备的移动量;如果上述距离值超过景深,则将该差值作为各组视觉采集设备的调整量,即滑动导轨的移动位移。
2.2 设计实例
多轴调节机构各部件组成如图2所示,主要包括支撑平台、移动执行机构和转动执行机构。其中移动执行机构由导轨、滑块、移动平台、丝杠和伺服电机构成;转动执行机构由回转驱动、调姿平台和伺服电机组成。
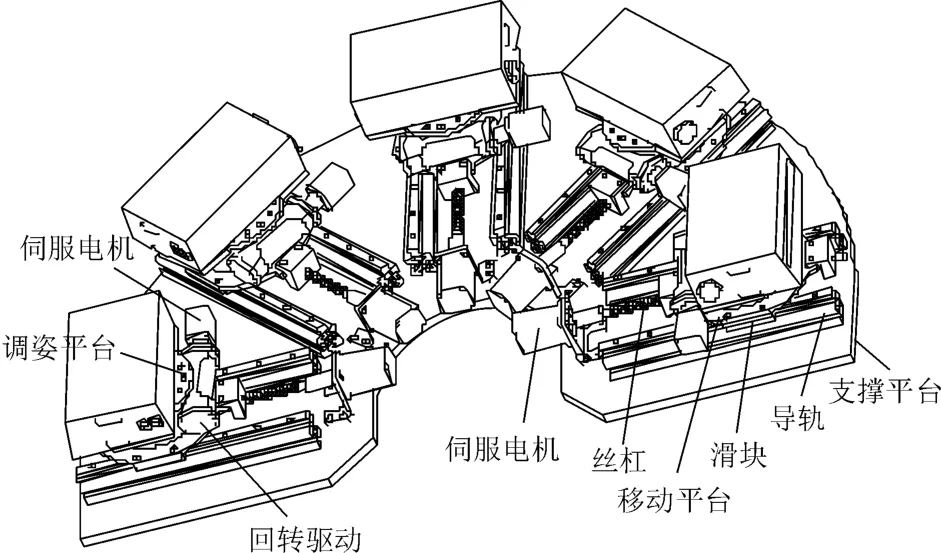
图2 多轴调节执行机构各部件组成
支撑平台设计如图3所示。支撑平台需具备重量轻、刚度大等特点,宜选用镁铝合金板材。其设计半径为700 mm、厚度为20 mm。图3中点O为圆心点,L1~L5分别为5组移动副中心线,其与水平方向夹角分别为 0°、45°、90°、135°、180°;S1~S5 为导轨定位槽,定位槽是420 mm×200 mm的矩形,深度均为2 mm,其长边与移动副中心线平行。螺纹孔位于定位槽内,螺纹孔尺寸为M6、相邻孔间隔为60 mm,与移动副中心线的距离为75 mm。导轨型号为SEG-GD14NA,长度为2 200 mm;丝杠长度为2 000 mm,直径为16 mm,导程为2 mm,其中丝杠轴线与对应移动副中心线平行。移动平台设计如图4所示,采用镁铝合金板材,下端面通过螺纹孔k1与对应滑块连接,上端面通过螺纹孔k2、k3与丝杠、回转驱动固定环连接,其中螺纹孔k1、k2、k3的尺寸分别为 Ф6.5、Ф6.5、Ф8.5 mm,回转驱动型号为 SE3。
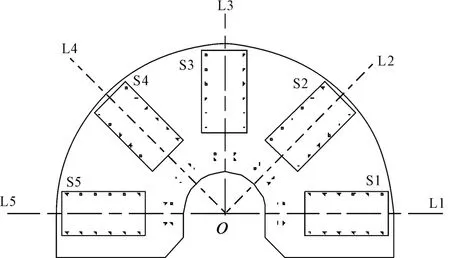
图3 支撑平台设计
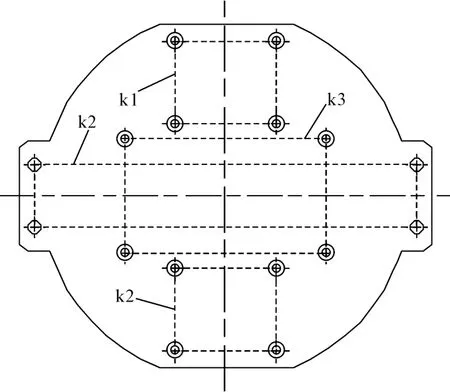
图4 移动平台设计

图5 调姿平台设计
调姿平台设计如图5所示,采用镁铝合金板材,上端面通过螺纹孔k4与视觉采集设备连接,下端面通过螺纹孔k5与回转驱动转动环连接,其中螺纹孔k4、k5的尺寸分别为Ф5.5、Ф6.5 mm。
回转驱动处的伺服电机型号为安川SGM7J-02AFC6S,额定功率为200 W、额定扭矩为0.64 Nm、额定转速为3 000 rpm;丝杠处伺服电机型号为SGM7J-02AFC7B,额定功率为500 W、额定扭矩为1.32 Nm、额定转速为3 000 rpm。
3 结 语
本文在分析隧道视觉检测系统现有问题的基础上,提出了一种利用机械方式解决视觉采集设备离焦问题的方法。设计了一种空间多自由度调节机构,由彼此独立的5组运动执行机构构成,可实现各组视觉采集设备的独立、实时调整,使待采集的目标区域始终位于数字相机和激光光源的最佳拍摄和最佳照射范围内,从而达到高质量图像采集的目标,相关成果为下一步基于机器视觉的公路隧道检测车的研制和设计奠定了理论基础。
[1] 李浩智,李惠君,董 浩.四轴五框架车载稳定平台稳定性的仿真分析[J].系统仿真学报,2012,24(11):2372-2377.
[2] 王朝进,李建友,王 刚,等.无损检测技术在公路隧道施工质量检测与控制中的应用[J].云南大学学报:自然科学版,2012,32(S2):281-286.
[3] 王建强,王履程.基于机器视觉的隧道车辆检测系统设计与实现[J].自动化与仪器仪表,2015(9):100-101.
[4] 王耀东,余祖俊,白 彪.基于图像处理的地铁隧道裂缝识别算法研究[J].仪器仪表学报,2015,35(7):51-58.
[5] 胡力群.路面检测车无损检测技术现状[J].交通标准化,2007(6):140-142.
[6] 刘学增,叶 康.隧道衬砌裂缝的远距离图像测量技术[J].同济大学学报:自然科学版,2012,40(6):27-34.
[7] 贾爱芹,陈建军,曹鸿钧.随机结构参数车辆在随机激励下的振动响应[J].西南交通大学学报,2014,49(3):438-443.
[8] 宋一凡,陈榕峰.基于路面不平整度的车辆振动响应分析方法[J].交通运输工程学报,2007,7(4):39-43.
[9] ZHOU X Y,ZHANG Z Y,FAN D P.Improved Angular Velocity Estimation Using MEMS Sensors with Applications in Miniature Inertially Stabilized Platforms[J].Chinese Journal of Aeronautics,2011,24(5):648-656.
[10] 马 建,孙守增,赵文义,等.中国隧道工程学术研究综述·2015[J].中国公路学报,2015,28(5):5-69.
[11] 武丽丽,吴安宁,李继生.路面颠簸对路面横向力系数测试系统影响的研究[J].公路交通科技,2005(3):51-53.
[12] 彭其渊,徐 进,罗 庆,等.公路平曲线参数对车辆轨迹和速度的影响规律[J].同济大学学报:自然科学版,2012,40(1):45-50.
[13] 张志学.基于车辆轨迹的驾驶员自由换道行为研究[J].城市道桥与防洪,2014(7):323-325,338.
[14] 刘 晓.并联6-PUS舰载稳定平台机构学基础论与实验研究[D].秦皇岛:燕山大学,2014.
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
数学小灵通·3-4年级(2017年3期)2017-04-16
上海农业学报(2017年3期)2017-04-10
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
电力自动化设备(2015年4期)2015-09-28
空间控制技术与应用(2015年1期)2015-06-05
资源节约与环保(2015年9期)2015-01-27
凿岩机械气动工具(2014年3期)2014-03-01
天津冶金(2014年4期)2014-02-28