
列车网络控制系统半实物仿真平台设计及应用*
2018-03-06 02:25李美华矫德余孙昊雯
铁道机车车辆 2018年1期
李美华, 矫德余, 孙昊雯
(中车大连电力牵引研发中心有限公司, 辽宁大连 116052)
网络控制系统(TCMS)用于监控车载牵引系统、制动系统和列车内各主要设备的状态,实现车辆的管理、监视和诊断功能。网络控制系统作为轨道交通装备的神经和大脑,其运行的可靠性关系着列车的行车安全及人们的生命财产安全。如有不慎,很可能造成无法挽回的损失和灾难。因此,网络控制系统在正式运营之前,必须对其进行充分的测试验证。然而整车的动静态调试阶段主要是各个子系统设备与设备之间,设备与车体网络之间的协调配合的调试过程,而非一个帮助各个子系统查找错误的过程。因此,急需一套高效可靠的地面测试系统对网络控制系统进行测试。
1 半实物仿真平台设计
1.1 设计需求分析
通过分析目前网络控制系统装车前功能测试方法的优缺点,可以明确在平台设计中应扬长避短,设计的测试平台应具有以下特点:一是测试平台能真实地模拟列车网络控制系统的工作状况;二是测试平台的测试过程操作方便,方便专业测试人员的介入;三是测试过程无需协调他方,能进行灵活自由的测试。
半实物仿真技术作为将物理仿真和数字仿真相结合的一种仿真技术,它比数字仿真更接近于真实情况,又能解决一些物理仿真无法模拟的问题。半实物仿真作为替代真实环境或设备的一种典型方法,既提高了仿真的逼真性,又解决了以前存在于系统中的许多复杂建模难题。
1.2 系统方案设计
借助于半实物仿真技术的设计思想,构建一个列车网络半实物仿真平台用于对网络控制系统中的车辆控制单元(VCU)功能及网络通信状况进行测试。设计中,对于被测单元VCU、司控台、远程输入输出单元(RIOM)、显示屏(DDU)等模块以实物形式接入仿真回路中,而对于牵引系统、辅助系统、制动系统等体积较为庞大的子系统以数学仿真模型运行于仿真机的形式接入仿真回路中,系统方案设计原理图如图1所示。
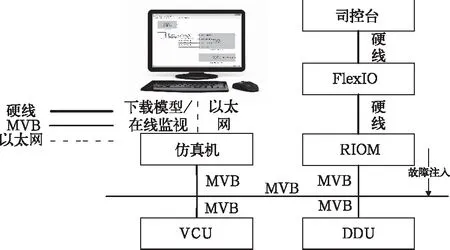
图1 网络半实物仿真平台设计原理图
1.3 具体实现
根据平台设计原理图,仿真机、VCU、RIOM和DDU之间通过MVB总线相连,它们之间是通过MVB总线进行数据通信;上位机(建模工具和监控软件)通过以太网线与仿真机相连;司控台和FlexI/O之间,FlexI/O与RIOM之间通过硬线相连。FlexI/O用于将采集到的硬线信号进行调理之后发送给RIOM单元的DI或AI模块进行采集;同时接收RIOM单元的DO或AO模块发出的硬线信号。因为在利用半实物仿真平台进行不同项目的网络控制系统测试时,各个项目的司控台的硬线信号在RIOM中的具体通道会有所不同,导致硬线接到RIOM单元的连接方式也会不同,因此在每进行一个项目的仿真时就需要改变一次硬线连接。为了避免这种反复接线的问题,可以通过在FlexI/O模块中调整采集到的相关硬线信号的顺序使其与项目中RIOM单元的数据通道相对应从而达到避免重新连接硬线的目的。
上位机中以MATLAB/Simulink软件作为前端仿真建模工具,用于进行网络控制系统各子系统的模型搭建及模型代码的生成和下载;上位机中还运行实验监控软件,实现对实时仿真测试进行项目管理、试验启停控制、测试参数输入、反馈变量监控以及试验数据记录等功能。仿真机选用的是能与MATLAB/Simulink实现无缝连接的NI PXI-8109仿真机,用于运行各子系统仿真模型的可执行目标代码。VCU机箱用于运行网络控制系统的被测主控程序,RIOM机箱用于采集司控台发出的硬线控制信号。
平台中还引入了故障注入模块,对网络控制系统施加干扰,用于模拟车辆运行过程中网络控制系统受到的来自噪声和振动方面的干扰。该模块由干扰注入硬件板卡和试验软件两部分组成,其中干扰注入硬件板卡用于产生干扰信号并注入到网络控制系统中;而试验软件则用于控制产生干扰的类型,干扰的启停时间和产生时长。
2 半实物仿真平台应用
2.1 仿真测试流程
在使用网络半实物仿真平台进行仿真测试时,测试人员一般需进行以下几个步骤:测试分析与设计,测试用例设计,离线模型搭建、编译、自动代码生成,监控界面的设计,模型链接下载,在线仿真试验等。仿真平台的仿真测试流程如图2所示。
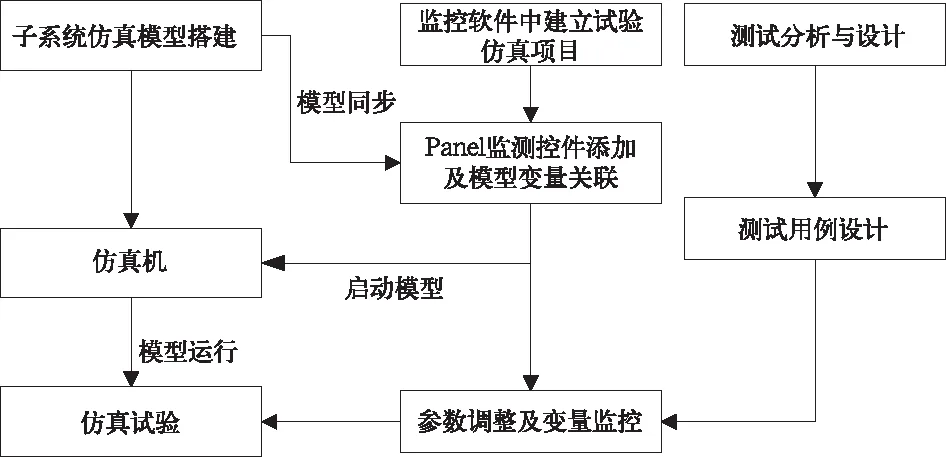
图2 网络半实物仿真平台测试流程图
2.2 模型搭建
测试开发人员利用网络半实物仿真平台进行测试时,需要为网络控制系统的非实物部分的各个子系统搭建仿真模型。模型的搭建过程如图3所示。
以基于MVB的网络控制系统为例进行模型搭建的介绍。在模型搭建过程中分析MVB网络的通信特点,利用Simulink自定义了MVB初始化模块、MVB接收模块及MVB发送模块,仿真子系统模型主要围绕这3个模块进行搭建。首先根据被测VCU的MVB数据流,利用相关软件生成适用于Simulink的.xml格式的数据流文件,并导入MVB初始化模块中。然后通过分析VCU与子系统之间的通信机制和功能特点,使子系统经过逻辑处理后的数据由子系统MVB发送模块发出,经VCU逻辑处理后的相应反馈数据由子系统MVB接收模块接收,最后将接收到的反馈数据与期望值作比较。在搭建好模型后还需进行相关的配置,包括选择.tlc文件、设置模型仿真步长、仿真时间、仿真机目标IP地址等,目的是为了能够生成可在仿真机中运行的目标模型代码。例如,当模拟牵引系统与VCU进行通信及功能交互时,搭建的牵引系统模型包括3部分,信号接收模块、逻辑功能模块和信号发送模块。其中逻辑功能模块依据牵引系统的内部逻辑功能进行搭建,主要完成电网电压、电网电流、不同牵引级位下牵引力和牵引制动力、逆变电流等的模拟。牵引系统模型如图4所示。
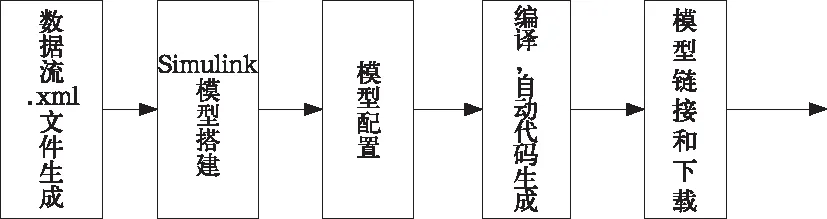
图3 Simulink模型搭建流程图

图4 牵引系统模型
2.3 测试界面设计
模型编译下载后会生成.Sim文件,通过测试监控软件打开后,可实现仿真模型与测试监控软件的同步对应。在监控软件中可进行加载模型,启动模型,停止模型等操作。而测试数据的输入以及反馈变量的监控和测试结果显示等操作则需要在测试监控软件的控制页面Panel中进行。因此进行测试之前首先需要对监控界面进行设计,向页面中添加与布局控件,将模型变量与控件关联等操作完成,如图5所示。
监控界面中,在试验状态下可对参数进行调整从而实现测试数据的输入,而对于测试结果的显示则通过将反馈变量与期望值的比较结果与指示灯显示控件关联实现,如对比结果匹配,则指示灯亮;不匹配,则指示灯灭。
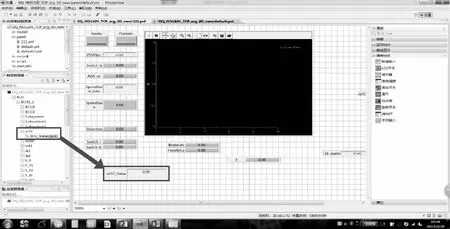
图5 测试监控页面
2.4 应用
该网络半实物仿真平台已经应用于国内外一些城轨地铁项目的网络控制系统的装车前功能测试,使得在后期的整车静动态调试过程中网络控制系统的差错率明显降低,提高了静动态调试效率,大大节省了调试投入的人力和物力成本。该平台还广泛应用于系统升级过程中的逻辑功能验证以及运营维护过程中的故障复现,便于查找程序BUG。
3 技术特点
相较于传统测试方法,该网络半实物仿真平台具有以下技术特点和创新点:
(1) 能够逼真地模拟列车实际运行状况,使网络控制系统的测试结果更加真实准确。
(2) 测试界面友好,利于测试参数的输入和测试结果的监测。
(3) 利于对网络控制系统开展客观,严格的独立测试,保证测试结果的客观性。
(4) 模块化仿真模型技术的采用利于各仿真测试项目之间模型的借用和移植,缩短了仿真系统测试模型搭建的周期。
(5) 提高网络控制系统产品静态调试和动态调试的效率,利于网络控制系统的功能升级维护,提高网络控制系统产品的可靠性。
4 结束语
设计实现了一套网络半实物仿真测试平台,用于对列车网络控制系统的功能测试。该测试平台在充分吸收传统测试方法优点的基础之上,有效地解决传统测试方法存在的问题,不仅逼真的模拟列车网络控制系统的运行状况,而且使整个测试过程操作方便,易于执行,能让开发方有足够的时间对网络控制系统开展灵活充分的测试,提高了网络控制系统产品的可靠性。网络半实物仿真测试的测试方法将是未来网络控制系统功能测试的发展趋势。
[1] 黄根生,赵红卫,王欣,等.CRH3动车组半实物仿真测试台通信的设计与实现[J].铁道机车车辆,2014,24(2):5-9,69.
[2] 王江,付文丽,等.基于MATLAB/Simulink系统仿真权威指南[M].北京:机械工业出版社,2013.
[3] 黄建强,鞠建波.半实物仿真技术研究现状及发展趋势[J].舰船电子工程,2011,31(7):5-7,25.
[4] 薛定宇,陈泉阳.基于MATLAB/Simulink的系统仿真技术与应用[M](第2版).北京:清华大学出版社,2010.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
中学生数理化·七年级数学人教版(2022年3期)2022-03-16
疯狂英语·新读写(2021年10期)2021-12-07
铁道通信信号(2020年3期)2020-09-21
新世纪智能(英语备考)(2019年4期)2019-06-26
铁道通信信号(2019年11期)2019-05-21
铁道通信信号(2018年8期)2018-11-10
作文小学中年级(2018年10期)2018-10-29
铁道通信信号(2018年1期)2018-06-06
电子制作(2018年1期)2018-04-04
