
船舶定速巡航控制策略
2018-03-23 02:48
机电设备 2018年1期
(中海油能源发展股份有限公司采油服务分公司,天津 300452)
0 引言
船舶运输的运量大、运价低,因此成为大宗货物运输中最受欢迎的一种运输方式。当今国际贸易总运量中的2/3以上、中国进出口货运总量的约90%都依赖于船舶运输。据克拉克松统计,截至2016年 12月1日世界商船船队保有量达到53 460艘之多。为保障如此庞大的船队运作,每年需要供给约 2亿吨航运燃料油,涉及到数百万的船员劳工为其服务。本文以降低燃料消耗、减少废气排放和减轻船舶操作人员的工作负荷为出发点,结合笔者的实船工作经验,探讨一种能够实现船舶定速航行功能的控制方式。针对不同推进类型的船舶,该控制系统能有效降低主机燃油消耗,同时还能解放驾驶人员的双手,为广大船舶驾驶人员提供更为舒适的驾乘体验。
前些年航运市场的异常火爆,直接导致世界各地竞相开办航运企业,添置新造船舶以增加运力,由于未考虑到国际海运市场的实际需求及周期变化,再鉴于当前全球经济的疲软,造成了航运业运力过剩、运价低迷和竞争激烈,使航运业利润空间逐步压缩,促进了海运企业优胜劣汰、资源整合的步伐。在此背景下各航运企业投入越来越多的精力来降低船舶的营运成本以追求利润。而船舶油料的消耗独占营运成本的一半之多,主机燃油消耗又占到总耗油量的70%~90%。近年来,针对船舶主推进系统节能的研究越来越多,但笔者注意到大部分科研人员主要围绕高效发动机、高效螺旋桨的研发,以及最佳营运航速的分析选择,且都取得了相当可喜的成果[1],但同时也有相应的限制。比如新型的先进设备仅适用于新造船舶的配备,选择最佳营运航速涉及十分繁琐的计算和水池试验,不便于所有操作人员掌握。本文探讨了一种便于实船应用,且面向所有新老船舶的控制系统,这里称其为船舶“巡航控制”,该系统能达到节能降耗的效果。
1 船舶航速和油耗之间的关系
研究船舶动力推进系统的节能降耗,首先需明确推进功率、船舶航速和油耗之间的相互影响。
首先分析油耗和航速之间的联系。根据《船舶原理》的介绍,推进功率和艉轴转速呈三次方正比关系,而航速和艉轴转速之间是线性关联。那么,不同航速下主机耗油量的多少可以用图1来表示。根据图1,以船舶增加、减少相同的速度来比较燃油消耗量的变化,可以明显看到:相同航速的改变,当速度偏向高值时燃油消耗的增加远大于航速偏向低值时燃油消耗的减少;相应地,航速偏向低值所减少的燃油消耗远少于航速偏向高值时的燃油增加。

图1 油耗-航速曲线
由此可见:在理想状况下,以预定航速航行的船舶当速度发生波动时,其高于平均航速时所消耗的燃油增加量明显大于其低于平均航速时的燃油节约量,这也就意味着船舶航速的波动会使总耗油量增加。巡航功能可以用来控制船舶航行在一个选定的航速,通过系统内嵌控制软件以最佳算法精准调节航速,以避免航速的波动,从而实现耗油量的节约。
1.1 稳定航速和波动航速的运营比较
理想工况(不考虑水流、风速等自然因素,不考虑载货量变化和海上波浪大小)时,船舶的对地航速与其对水航速一致,而对水航速与推进功率直接关联。使稳定航速等同于波动航速时的平均值,如图2所示,在一个给定的航程上,定速航行能有效地降低主机总耗油量。
引起图2中油耗增加的因素可以分为以下几个方面:1)天气、海浪和洋流引起的速度波动;2)人为控制船速时操作不精确;3)航速明显偏离后进行调整而造成的反映迟钝;4)为了确保到港时间,前期运行较大航速,或者后期加大航速进行弥补。使用巡航功能则可有效避免以上原因引起的油耗增加。

图2 理想工况下稳定航速与波动航速对比
1.2 恒定航速与恒定输出功率的运营比较
在实船航行过程中,所面临的海上工况相对复杂且很难预测。面对突然的海浪冲击,或者风速、洋流的改变,巡航功能还能控制输出功率,以保证船舶高效率的航行,同时避免由此引起的发动机功率峰值的出现。
图3显示了同一行程下恒定航速运营跟恒定输出功率运营的区别。恶劣天气或海况下行驶的船舶,如果选择恒定航速航行,就需要在原有输出功率上进行补偿,用以克服增加的船体阻力,也意味着主机输出功率在波动,相应的就会增加油耗。如果此时以恒定主机输出功率航行,保持理想的主机油耗,虽航速变化,但可有效地避免主机出现输出功率波动峰值。待通过恶劣海况海域,再选择定速巡航模式,适当增加设定航速以保证预定的到港时间。可以看到在恒功率模式介入以后,从A港到B港之间行程的总耗油量明显降低。

图3 恒定航速+补偿与恒定输出功率对比
1.3 巡航功能应用于可调螺距螺旋桨船舶
对于采用可调桨推进器的船舶,使用巡航功能保持推进效率最佳,主机油耗降低更加明显。
图4为某船舶航行曲线图,由主机输出特性曲线、螺旋桨特性曲线、航速曲线、和主机油耗曲线组合而成。可以看到:同一航速可以有许多种不同的n-P/D组合来实现,但不同的组合之间油耗相差甚远。以13.5 kn航速为例,运行在C点时油耗最低,为202 kg/h;运行在 A点时油耗最高,为 238 kg/h,高于最低值17.8%;而设计点B油耗为216 kg/h,也高出C点6.7%之多。根据该图可以总结出:同一航速情况下,高转速小螺距运行时油耗较大,低速大螺距运行时则油耗降低[2]。
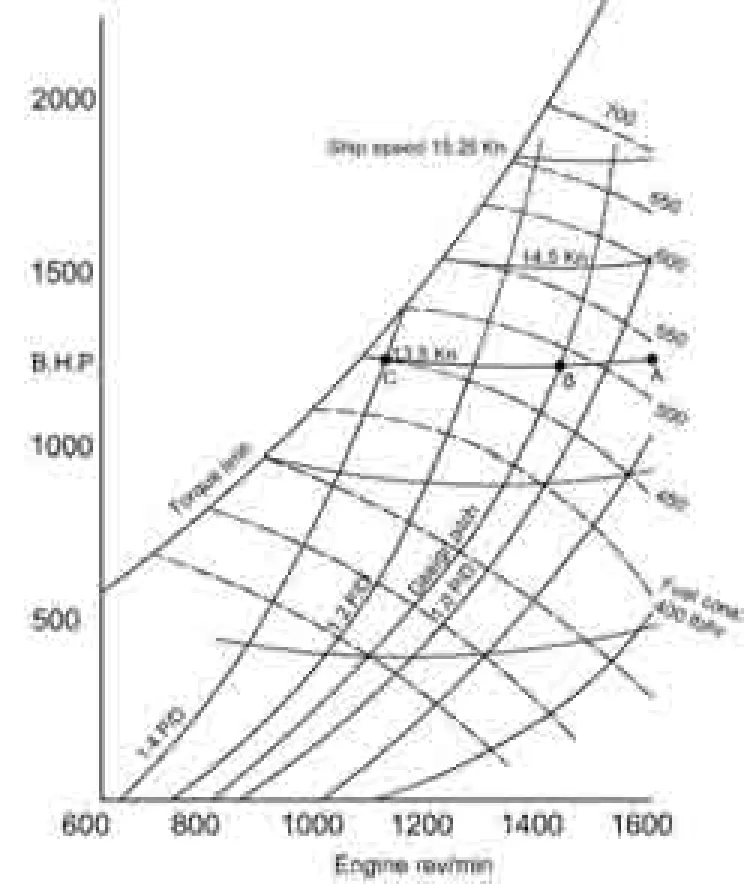
图4 航行曲线图
图5为可调桨效率曲线。不同螺距有不同的效率曲线,每个螺距在不同转速时其效率曲线似抛物线状,且最大效率点只对应特定的转速。只有当可调桨工作在包络线2上时其效率才能保持最佳。
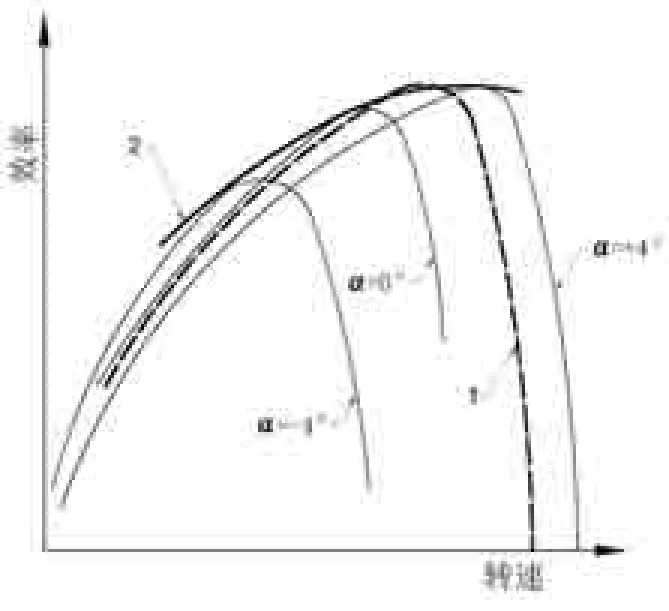
图5 可调桨效率曲线
当前主流的可调桨控制模式分为恒转速运行和变速变桨操纵两种[3]。恒转速时,主机保持最大转速,通过改变螺旋桨的螺距角获得不同的船速,其主机单位油耗曲线如图6所示;变速变桨操纵时,主机转速和螺距角一起改变来实现船速的改变,其主机单位油耗曲线如图7所示。不难发现:在低功率区域即低航速时,恒转速模式的油耗呈现倍数级的增长。从节能的角度来看,低航速或者低功率输出时应该选用变速变桨模式运营。
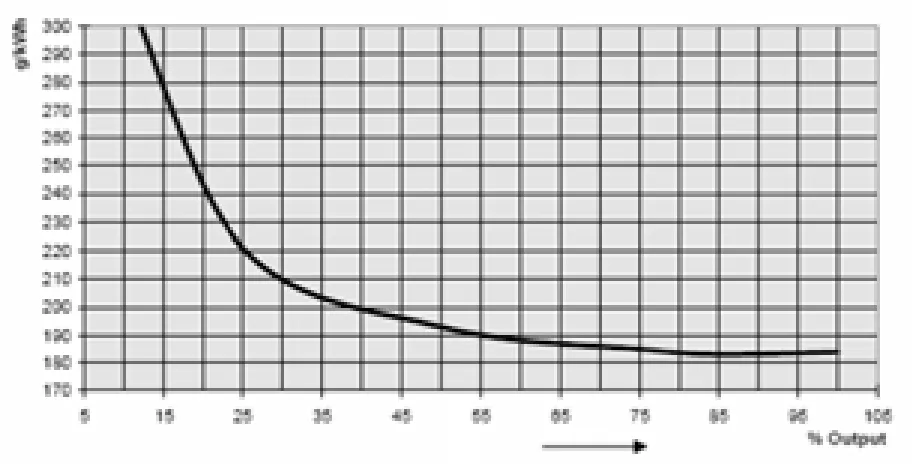
图6 恒转速油耗曲线

图7 变转速油耗曲线
从可调螺距螺旋桨选型设计来讲,其设计点只有一个。在设计点对应的螺距和转速时,螺旋桨产生100%的正推力,其桨效最大。船舶运营时,由于船舶污底,螺旋桨附着海洋生物,风浪、洋流改变或偏离设计航速,所以船舶航行无法避免偏离设计点。在恒速模式下,改变螺旋桨螺距角改变航速,但可调螺距螺旋桨会出现反向推力,如图8所示。负推力即代表发动机做了无用功,或者说浪费了燃油。巡航控制的思路就是以一种模糊控制的方式[4],根据实际航速输出最佳的n-P/D组合,同时根据相应输出功率及时调整,以保证桨上只承受正向推力,用以消除不必要的无用功,如图9所示。
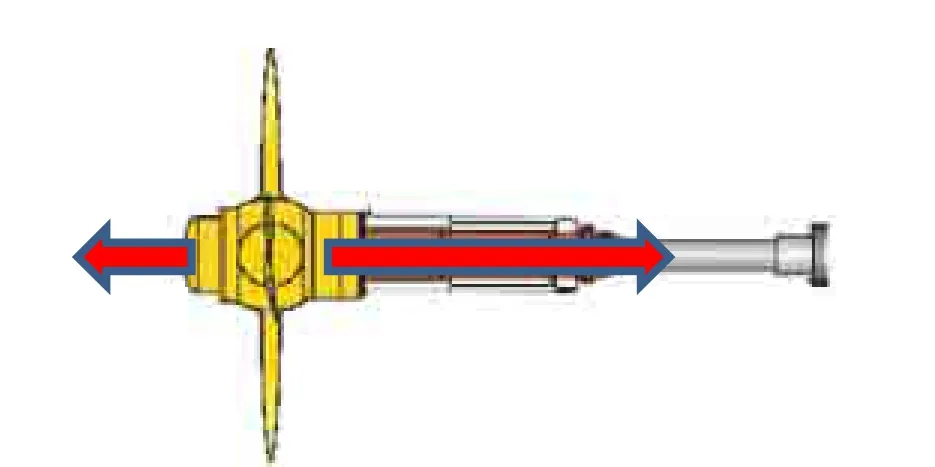
图8 常规推力矢量

图9 优化的推力矢量
2 巡航系统及控制逻辑
根据以上分析,满足以下几个条件,船舶运行就能实现最大限度的低油耗,从而节能降排:1)在到港时间充沛的情况下低速航行;2)航行时避免频繁的人为干预,确保航速稳定;3)恶劣工况时保证主机输出功率恒定,避免主机输出负荷峰值;4)各种工况、海况时,螺旋桨螺距和转速最佳组合使桨效最优。
为实现上述功能,提出“巡航”这种控制方式,该控制基本组成如图10所示系统框图,包含驾驶台模块、中央控制单元和集控室模块及相关的一些接口信号。属于主机或可调桨遥控系统的补充部分,可以在新建造船时进行配置,也可以对已运营船舶进行加装。在巡航控制功能不介入时,所有控制模式与先前相同,不影响船舶的正常运营。
控制逻辑如图11所示。使用巡航功能时,通过驾驶台操作面板选择巡航模式。海况良好时通过设定船舶的航速,不仅可保证准确的到港时间及整个航段的最低油耗,更能避免人工通过控制发动机转速和螺距方式,时时调整以获得预定航速带来的极大工作量。在通过恶劣海况海域时,选择恒功率模式,此时锁定主机负荷进行工作,船速相应变化,在船舶驶出此海域后取消恒功率模式,进入巡航模式,从而降低整个航程的主机燃油消耗总量。

图10 巡航系统框图

图11 控制逻辑图
另一方面,随着现代科技的高速发展及汽车智能无人驾驶的出现,船舶智能无人驾驶试验也不断涌现。智能驾驶首先需要实现对船舶航速的自动控制,而该巡航控制功能恰好切合了这一主题。
3 结论
通过对船舶各种航速下运营时油耗的比较,以及一般船舶航行曲线图的分析,结合笔者的实船工作经验,总结出一种方便、实用的推进系统控制方式——巡航控制,实现了节能减排,减轻了驾驶人员工作负荷,同时确保了更加准时的到港时间,为实现船舶智能驾驶做铺垫。
[1] 张署.船舶营运航速的优化分析[D].上海: 上海海事大学, 2004.
[2] 魏应三, 王永生.船舶航速优化原理研究[J].中国造船, 2008(s1): 75-82.
[3] 马宁, 秦珩.基于 PLC的调距桨控制系统的设计[J].船电技术, 2015(8): 61-65.
[4] 王国近, 王炅, 戴金鹏, 等.船舶可调桨螺距模糊PID 控制器设计[J].舰船科学技术, 2017(7):100-105.
猜你喜欢
水上消防(2022年1期)2022-06-16
内江科技(2022年3期)2022-03-30
海洋开发与管理(2020年2期)2020-09-10
科技创新与应用(2020年19期)2020-06-23
小资CHIC!ELEGANCE(2019年40期)2019-12-10
舰船科学技术(2018年7期)2018-07-25
中国水能及电气化(2016年11期)2016-02-28
舰船科学技术(2016年1期)2016-02-27
中国卫生标准管理(2015年4期)2016-01-14
船海工程(2012年4期)2012-01-22
