
基于模糊PID电动振动台控制系统设计与实现
2018-03-30 01:29王会民陈家焱赵佃云
自动化与仪表 2018年1期
王会民,洪 涛,陈家焱,赵佃云
(中国计量大学 质量与安全工程学院,杭州 310018)
飞行器、舰船、车辆等运载工具上的机械设备、电子器件在生产、运输、工作和维修时常处于一个复杂的振动环境之中。振动带来的危害不容小觑,在机械加工领域,振动往往会造成机械结构的磨损,降低加工精度;在交通运输领域,振动会降低车辆的安全度和舒适度;在航空航天领域,很多火箭发射失利是由于振动引起的[1]。为保障结构或系统的安全性和可靠性,在其研制过程中需要对其进行地面振动环境模拟试验和可靠性试验。这类试验对于指导机械结构的优化设计,保证系统结构强度、提高设备的总体性能等诸多方面具有极为重要的意义,同时也是许多产品设计规范的强制性要求[2]。
正弦振动是地面振动环境模拟试验的重要振动形式,而电动振动台系统是进行正弦振动的主要系统。其中电动振动台控制系统是整个振动系统的核心[3]。通过分析电动振动台控制系统的特点和电气控制要求,可以通过Modbus-ASCII通信协议将PLC与变频器结合以实现对电动振动台体的控制,同时通过LabVIEW的NI OPC通道实现PLC与上位机的交互。
1 电动振动台控制系统总体方案
本次设计的电动振动台系统如图1所示,它由上位机、电动振动台控制系统、电动振动台体、冷却系统组成[4]。

图1 典型电动振动台系统Fig.1 Typical electric shaker system
上位机负责电动振动台控制系统运行参数的输入和振动运行情况的显示;电动振动台控制系统接收上位机的输入参数,对振动台体进行控制,同时将电动振动台的运行情况传递给上位机;电动振动台体实际上是将电能转化为机械能的装置,是一个振动源;由于振动台在工作的时候,励磁线圈及驱动线圈中都通有很大的电流,因此会产生大量的热量,所以需要冷却系统对振动台进行降温冷却。电动振动台控制系统是整个电动振动台系统的核心。根据电动振动台控制系统需产生正弦变化电流的原理,可以选用PLC控制变频器的方案实现电动振动台控制系统的功能。其设计方案如图2所示(这里的PLC为台达DVP12SA211T,变频器为台达VFD015B21A,AD转换器为 DVP04AD,DA转换器为 DVP04DA)。
1.1 电动振动台控制系统硬件

图2 电动振动台控制系统设计方案Fig.2 Electric shaker control system design
电动振动台控制系统硬件设计采用“PLC+计算机”的控制方案。计算机作为上位机主要负责上层控制,包括整个系统参数的输入与显示、修改PLC程序、控制操作(人机交互)界面、数据库等;PLC作为下位机主要负责底层控制,包括变频器输出频率、自动增益放大器的控制、振动方向的选择等。
下位机PLC选用台达DVP12SA211T,晶体管输出,24 VDC供电,8输入/4输出,提供2轴100 kHz高速脉冲输出,内置1组RS-232与2组RS-485通讯端口(主/从站),兼容标准Modbus ASCII/RTU通讯协议。上位机通过串口、采用NI OPC协议与PLC的RS-232通信端口建立起通信[5],用以向PLC传递上位机的输入参数和向上位机传递电动振动台的运行情况,而PLC通过Modbus协议经RS-485总线与变频器控制产生频率变化的电流[6]。
1.2 电动振动台控制系统PLC程序
此PLC程序采用模块化的编程思想,将整个程序分为若干个子程序模块,在主程序中对各子程序模块进行组合、调用。在本系统中,子程序模块包括系统初始化程序、定频测试程序、线性扫频程序、对数扫频程序、多阶测试程序等。程序流程如图3所示。

图3 电动台振动控制PLC流程Fig.3 Electric shaker control PLC flow chart
2 电动振动台PLC控制策略研究
电动振动控制系统是以PLC+变频器的控制模式,配合加速度传感器、继电器、自动增益放大器对振动过程进行自动控制。这里的PLC有2个作用:一是与变频器结合产生电动振动台驱动信号;二是PLC通过加速度目标值与测量值的比较得到一个控制量,通过这个控制量调整激励电流的大小。
2.1 电动振动台驱动信号生成算法
电动振动台驱动信号产生流程如下,首先在PLC程序里对RS-485通信端口进行初始化(设置端口号、波特率、奇偶检验位、数据位),然后通过MODED指令来获取变频主频率和MODWR指令来设置变频器的主频率等相关参数,从而生成我们需要的频率恒定、频率线性变化、频率对数变化、频率多阶段变化4种模拟信号。频率恒定信号、频率线性变化信号、频率对数变化信号和频率多阶段变化信号是 PLC 分别按照式(1)~式(4)产生的。

式中:f0为频率恒定信号的初始频率,Hz;f为频率恒定信号的频率,Hz。

式中:m为线性扫频速率,Hz/min;f0为线性扫频初始频率,Hz;t为时间,s;f为与 t对应的频率线性变化信号的频率,Hz。

式中:n为对数扫频速率,倍频程/min;f0为对数扫频初始频率,Hz;t为时间,s;f为与 t对应的频率对数变化信号的频率,Hz。

式中:f0为频率多阶段变化信号的初始频率,Hz;t为时间,s; f1、 f2、 fn为分别与时间段(t1,t2]、(t2,t3]、(tn,tn+1]对应的频率多阶段变化信号的频率,Hz;t1、t2、t3、tn、tn+1为频率多阶段变化信号频率发生变化的时间点,s。
同时PLC对此过程进行计时,当达到Z轴或X、Y轴的运动时间,将DVP-SA2的2个输出口相应的置1或0来激发相应的继电器开或关,从而驱动电动振动台体Z轴或X、Y轴运动。
2.2 基于模糊PID复合控制的加速度控制算法
加速度控制是整个电动振动控制系统的核心环节。其自动控制原理是PLC根据不同频率应达到的加速度的目标值与实际测量值比较后得到一个控制量,再由这个控制量控制自动增益放大器调节激励信号[7]。控制过程如图4所示

图4 加速度的模糊PID复合控制原理Fig.4 Acceleration fuzzy-PID composite control principle

图5 加速度随频率的变化曲线Fig.5 Acceleration versus frequency curve
其目标加速度随频率的变化曲线如图5所示(图中横、纵坐标皆为对数刻度),由图可知其加速度的变化分为两部分。第一部分加速度线性变化,第二部分加速度一直稳定在某一个值。根据加速度这样的变化规律,提出一种模糊PID复合控制的加速度控制算法。通过设置一个开关量R0即加速度线性变化部分与稳定部分的转折点,根据输入量所处范围的不同选择不同的控制器。当输入量小于R0时,此时加速度变化较快且变化量大,可以利用模糊控制器动态性好,上升速度快,超调量小的优点,当输入量大于R0时,此时加速度稳定在某一个值,可以利用PID控制器控制精度高、稳态性的优点,其控制原理如图6所示。
其中PID控制器选用的是积分分离式PID控制算法,其控制算法如下:


图6 模糊PID复合控制Fig.6 Fuzzy-PID composite control
式中:k 为采样序号 1,2,3…;u(k)为第 k 次采样时刻的输出值;e(k)为实际测量值的第k次采样与目标设定值的控制偏差;e(k-1)为实际测量值的第k-1次采样与目标设定值的控制偏差;Kp为控制器的比例系数;α为积分项的开关系数,当时,α=1,反之,α=0;Ki为控制器的积分时间常数;Kd为控制器的微分时间常数;T为采样周期[8]。积分分离式PID控制就是人为设定一个ε阈值(ε>0),当误差值超过这个阈值ε时,采用PD控制,这样可避免产生过大的超调,又可以使系统有较快的响应。当偏差小于阈值ε时,又采用PID控制,以保证系统的控制精度[9]。
模糊控制器是运用模糊数学的基本理论和方法,把控制规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关专家的控制信息作为知识存入计算机知识库中[10],然后计算机根据控制系统实际响应状况,运用模糊控制规则表中的相关的规则进行模糊推理的一种控制器,包括模糊化、模糊推理、模糊判决三部分,其中r为系统设定值精确量;e、ec分别为系统误差与误差变化率精确量;E、Ec分别为反映系统误差与误差变化的语言变量的模糊集合(模糊量);u为模糊控制器的输出的控制作用(精确量);y为系统输出(精确量)。
在设定扫频模式为线性扫频,扫频范围为6 Hz~32 Hz,扫频时间间隔为 1 s,扫频率为 1 Hz/s,扫频方向为向上扫频,恒加速度为2g,恒位移为2 mm的情况下,分别采用PID控制算法、模糊控制算法、模糊PID复合控制算法对电动振动台进行控制,其控制效果如图7所示(图中横、纵坐标皆为对数刻度),PID控制下的加速度值在转折点 (即图中标准加速度值线性变化与稳定不变的交接点,以下简称转折点)之前与标准加速度值之间的误差较大,在转折点之后与标准加速度值之间的误差很小,模糊控制下的加速度值在转折点之前与标准加速度值之间的误差较小,在转折点之后与标准加速度值之间的误差较大,而模糊PID复合控制则综合了模糊控制与PID控制的优点,其加速度的误差小于国标GB/T13310-2007规定的±10%的范围,由此证明将此模糊PID复合控制运用于电动振动台的加速度控制中是可行的。
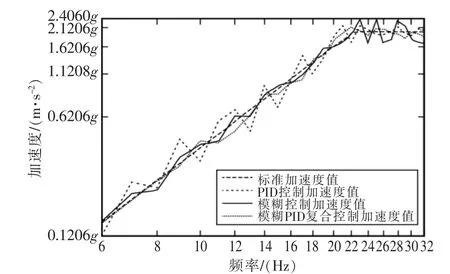
图7 三种不同控制算法的加速度变化Fig.7 Three different control algorithm acceleration changes
3 电动振动台控制系统界面设计
计算机采用虚拟仪器LabVIEW作为开发平台,用其创建电动振动控制系统的人机交互界面。LabVIEW是图形化的程序语言,它提供了大量与实际仪器相似的旋钮、开关、指示灯等控件,是实现仪器编程和数据采集系统的便捷方式,具有运行速度快,调试和维护简单,灵活性好的优点[11-12]。该上位机主要包括定频测试、线性扫频、对数扫频、多阶测试四个功能模块组成。每个模块都包括试验命令设置区(用来启动、暂停、停止试验)、试验状态显示区(用以试验进行过程中一些参数的实时显示)、试验参数设置区 (用以对试验进行前一些参数进行设置)、图形显示区(用图形显示试验运行过程中参数的动态变化)、特殊功能区(特殊功能包括返回主界面功能的“关闭试验”、将试验运行过程中的情况保存为图片的“导出图片”)如图8所示。
由于振动系统本身的时变性和环境的干扰,可能导致加速度测量值与设定值存在一定的误差。这里为了表示误差的大小,在加速度目标值的上下±3 dB、±6 dB处设置了高低报警谱、高低中断谱(图8右上小图中的4条直线),而弯曲的那条色谱线为系统实际运行中的加速度。为了便于观察实际的加速度处于哪种状态,图7左侧创建了5个LED灯表示实际的加速度处于的状态,比如加速度处于高报警谱与低报警谱之间,则正常LED灯亮(如图8所示),再比如实际的加速度高于高中断谱,则高中断LED亮,同时触发“试验命令窗口”中的暂停按钮以防止损坏。
电动振动控制系统的使用步骤如下:
步骤1 首先将要进行振动测试的产品用夹具固定在振动台体上,然后启动电动振动控制系统;
步骤2 通过电动振动控制系统人机交互主界面选择要进行的哪种振动试验,进入功能界面设置扫频的上下限频率、系统运行时间、开始运行频率扫频率等一系列参数;
步骤3 按下试验开始按钮,启动振动试验,这时系统开始计时,振动台体与测试产品开始振动;
步骤4 当加速度测量值与目标设定值相差较大时,PLC通过计算差值得到一个控制量来调整自动增益放大器的输出,从而使测量值与目标值保持一致;
步骤5 在试验进行过程中,可随时暂停、继续、停止试验,另外当系统计时达设定时间后,系统也会自动停止试验;
步骤6 试验进行完以后,可点击特殊功能区中的“导出图片”按钮,将试验情况保存下来。
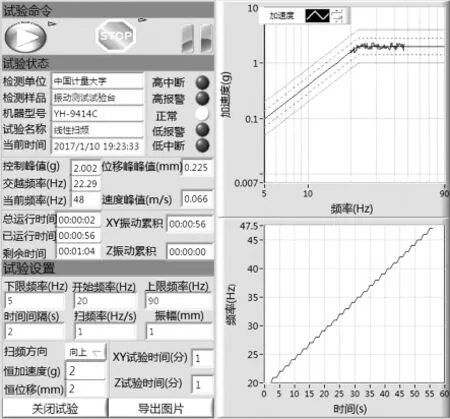
图8 功能界面Fig.8 Functional interface
4 结语
本文利用PLC与变频器成功实现了对电动振动台体的控制,同时借助LabVIEW这个强大的开发平台,创建了友好的人机交互界面。本电动振动台PLC控制系统在投入运用中运行良好,可靠性高,操作和维护方便,满足了对产品进行地面振动环境模拟试验和可靠性试验的要求。本控制系统也可以改造应用于控制机械振动台和液压振动台,具有较高的推广和使用价值。
[1]徐鉴.振动控制研究进展综述[J].力学季刊,2015(4):547-565.
[2]韩俊伟,张连朋.多自由度振动台的发展与控制技术[J].液压与气动,2014(1):1-6.
[3]宦海祥,范真.电动振动设备的发展及展望[J].环境技术,2006,24(4):28-31.
[4]陈小慧.电动振动台动力学建模及其扩展台面设计[D].成都:西南交通大学,2008.
[5]林献坤,朱琳,高礼刚.基于LabVIEW和OPC的三轴加载机测控系统开发[J].仪表技术与传感器,2015(5):59-61.
[6]赵洪业,曲波,高翔,等.基于PLC的油气分离中控系统性能检测系统[J].自动化与仪表,2017,32(1):51-53.
[7]冉育强,李军,杨军.基于PLC的环境模拟系统温度控制算法的研究与实现[J].计算机测量与控制,2015,23(10):3377-3380.
[8]吕华芳,杨汉波,丛振涛,等.基于PLC控制的室内降雨入渗自动测定系统[J].农业机械学报,2014,45(9):144-149.
[9]胡科峰,周云飞,李作清,等.基于积分分离的PID位置控制器的设计[J].机床与液压,2004(5):19-21.
[10]王明军.基于模糊PID的箱式电加热炉控制系统[D].大连:大连理工大学,2009.
[11]许超,徐惠钢,谢启.基于LabVIEW的变频器老化检测系统[J].仪表技术与传感器,2016(5):68-72.
[12]赵梅,胡天亮,张倩,等.基于LabVIEW的AMT数据采集系统设计与研究[J].山东大学学报:工学版,2011,41(6):70-74.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
探索科学(学术版)(2020年2期)2021-01-16
防爆电机(2020年3期)2020-11-06
航天器环境工程(2020年3期)2020-11-04
通信技术(2018年7期)2018-07-26
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05
振动与冲击(2017年3期)2017-03-09
军民两用技术与产品(2015年23期)2015-01-08
自动化博览(2014年12期)2014-02-28
