
基于超声传感器网络的定位系统设计
2018-03-31 12:22张燕沈洲
电脑知识与技术 2018年6期
关键词:无线传感网络
张燕 沈洲

摘要:该文设计了一款可以在小范围环境下,通过信标进行相对定位的系统。使用NRF24101搭建无线网络,实现未知节点与信标节点的数据通信;使用超声传感器获取未知节点与信标节点的距离。本论文使用TOA方式获取距离信息,在获取距离信息后,使用三点定位算法计算出未知节点的坐标信息。通过实际运行结果说明其正确性。
关键词:无线传感网络;TOA;定位系统;NRF24L01
中图分类号:TP751.1 文献标识码:A 文章编号:1009-3044(2018)06-0029-04
1996年,美國加州大学洛杉矶分校大学提出“低功耗无线集成微传感器”开创了现代无线传感器网络前奏。在这之后,无线传感器网络受到了来自社会各界的关注,成为在国家防御、目标定位、环境监测、智能交通、智能农业、大型停车场管理和机场安检等众多领域中具有较强竞争力的应用性技术之一。由于超声室内定位技术的应用前景和工程需求,国内外许多机构都开展了这个方向的研究并取得了一定的成果。其中代表性的研究成果有:1)美国InterSense公司设计的Constel-lation系统。其发射器放在固定的位置上,定位目标上有一个3D惯性传感仪器和许多超声接收器。发射器依次被相对应的接收器的同步触发信号激发出超声脉冲信号,接收器计算出脉冲的时间并转换成距离信息。2)剑桥AT&T;实验室开发的ActiveBAT系统。它是采用超声波传输的实践延迟技术来定位的。3)MIT计算机科学和人工智能实验室研究的Cricket系统。它是由超声发射器和定位目标的嵌入接收器组成,通过三角测量计算来实现定位的。4)东京大学设计的Dolphin系统。它的原理和ActiveBat、Cricket是相似的。不同在于大范围定位时,Dolphin系统只要少量的超声发射器和接收器,然后依据一种递归算法来实现依次定位,降低了构造和操作的成本。5)英国剑桥大学通信工程实验室开发的宽带超声波定位系统。该系统提出一种利用宽带传感器的新型超声定位系统,具有宽频通带宽度。
本论文研究了基于无线网络的超声传感器定位系统。
1系统组成和结构
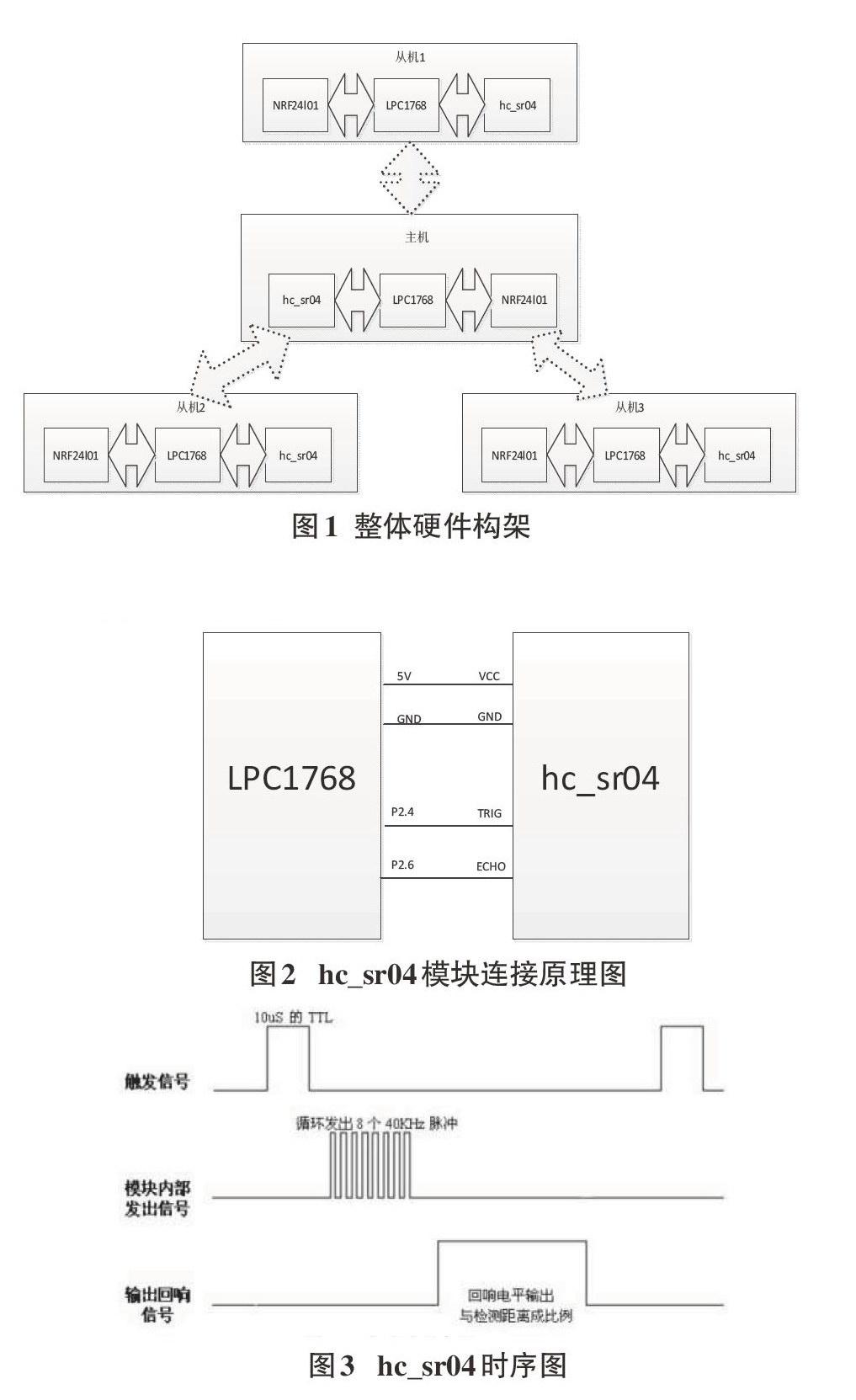
超声传感器网络的定位系统整体硬件设计框架如图1所示,分为主机和从机两个部分,其中有1个主机,3个从机。主机与从机之间通过无线网络进行通信。主机与从机都是由作为MCU的LPCI768、超声模块hc_sr04、和无线传输模块NRF24101组成。其中无线传输模块NRF24101是搭建主机与从机之间的无线网络,实现数据的传输;超声模块hc_sr04是通过超声测距原理测量主机与从机之间的距离。由于主机、从机中都使用到超声模块和无线传输模块,因此对此分别进行介绍。
2 hc_sr04测量距离部分设计
hc_sr04一共有四个接口端。VCC接入5V电源,GND接地线,TRIG输入触发控制信号,ECHO输出回响信号。
由于hc_sr04的TRIG输入端口和ECHO输出端口传输的都是TTL信号,因此,hc_sr04与LPCI768之间通过10口就可以实现数据的通信。如图2所示,可以设置LPC1768上的P2.4和P2.6端口分别为TIRG和ECHO的连接口。其中LPCI768的P2.4端口输出TRIG触发信号,连接he_st04的TRIG输入端口;LPCI768的P2.6端口输入ECHO回响信号,连接hc_sr04的输出端口。函数hc_sr04_init()实现对这两个IO口的初始化。
图3为超声模块的时序图。从图中可以看出当触发端TIRG发出一个10us的TTL高电平时,模块的内部会自动发送一个8个40Khz的超声脉冲并检测回响信号。一旦检测到回响信号,ECHO将输出回响信号,回响信号电平输出的宽度与检测距离成正比,且高电平持续时间就为超声信号发送到接收的时间。因为本课题所应用的是两个超声模块进行一个发送,一个接收的功能,所以测量的距离=时间*声速。
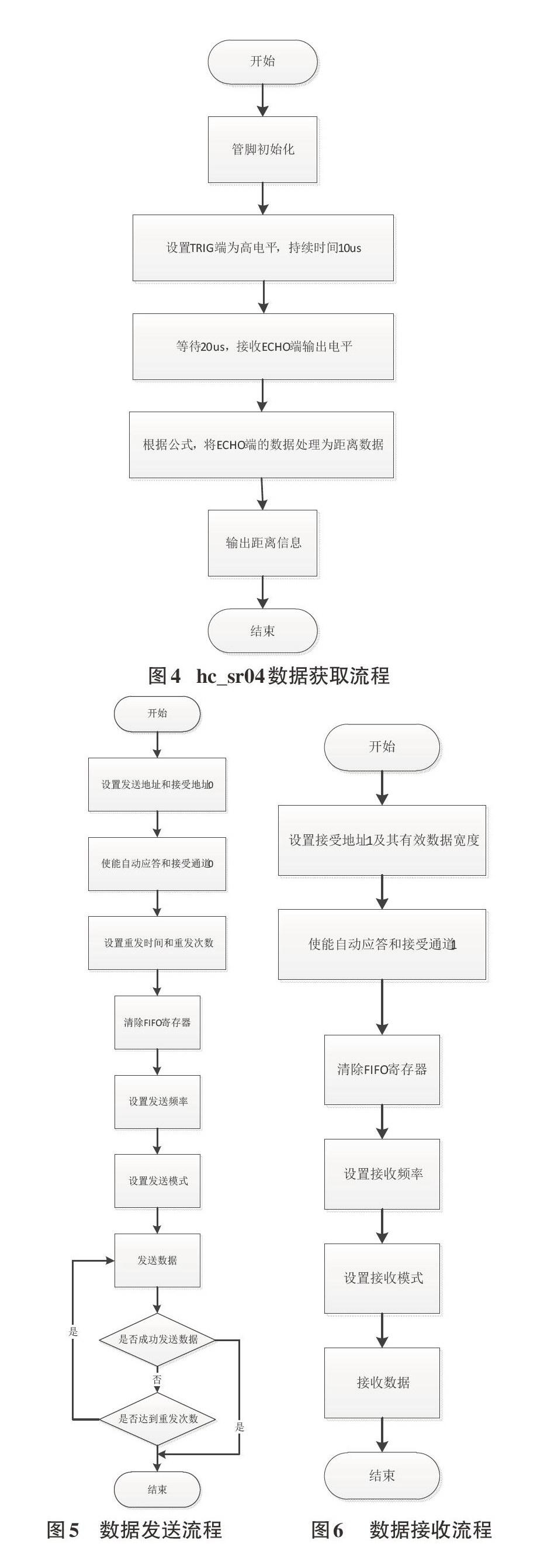
图4是hc_sr04数据获取的流程图。程序开始后,首先对所用到的LPC1768的管脚进行初始化,然后给TRIG端一个持续10us的高电平,因为声音的速度约为340m/s,当测量距离为6m时(本设计采用两个超声模块进行一个发超声信号,一个接收超声信号进行测距的,单个模块的测量距离为3m,理论上的测量距离可以达到6m),声波往返的时间约为6m/(340m/s)=20us,所以等待20us后,ECHO端接收数据。此时所接收的数据为超声波从发送到接收到回响信号的时间。因此,此时速测的距离=时间*声速。
3 NRF24101无线网络搭建部分设计
本文所设计的超声定位系统是基于无线网络进行数据传输的,因此实现无线模块NRF24101的发送、接收设置,并搭建无线网络是实现超声传感器网络定位的基础。
3.1 NRF24101的发送与接收设置
在无线传输进行前,要先对NRF24101所使用到的管脚进行初始化。初始化后,LPC1768可以使用SPI协议对NRF24101的寄存器进行读写操作。此时可以设置相应的寄存器完成无线传输的发送和接受。
图5是发送部分的流程图。程序开始后,先设置发送地址和接收地址0,这两个地址必须为同一地址,并设置发送数据的宽度。然后使能自动应答模式并使能接收通道0,之后设置重发时间和重发次数,其次清除FIFO,为发送数据清理出空间。然后设置发送频率,这是十分重要的一步,最后通信的实现不仅仅要发送地址接收地址相同,还要发送频率和接收频率相同才行。最后将NRF24101模块设置为发送模式,就可以发送数据,当发送数据成功或达到最大重发次数时,结束流程。
图6为接收部分的流程图。程序开始后,先设置接收地址1,其地址应为发送部分的发送地址,并设置接收数据的宽度。然后使能自动应答模式并使能接收通道1,之后设置重发时间和重发次数,其次清除FIFO,为接收数据清理出空间。然后设置接收频率与地址相同,这的接收频率应与发送部分的发送频率相同。最后,将NRF24101模块设置为接收模式,就可以接收数据,完成整个流程。
3.2无线网络的搭建
本文中所搭建的无线数据传输网络,从机的地址是相同的,是通过改变不同的射频发射接收频率来区分各个从机,实现主机与各从机之间的数据通信的。如图7所示,主机的发送地址为ADD1,接收地址为ADD2;三个从机的发送地址都为ADD2,接收地址为ADD1。但它们主机与各个从机发送频率是不同的:主机与向从机1发送数据时的通信频率为2.432Ghz;主机与向从机2发送数据时的通信频率为2.448hz;主机与向从机3发送数据时的通信频率为2.464Ghz。而3个从机向主机发送数据时,使用的是同一频率为2.416Ghz。这种现象是因为从机作为接收端时,主机向从机发送数据,此时的从机地址都是相同的,只能通过不同的通信频率来区分从机;但从机向主机发送数据时,是在接收到主机向从机发送的数据后才开始进行的,这时只有一个从机作为发送端,主机作为接收端,因此所有的从机都可以使用这一相同的频率向主机发送数据。
图8所示流程图为主机的流程图,程序在开始后首先进行初始化,使各模块能正常的使用。然后主机依次向从机发送定位信息,接收回传数据并检查数据是否准确。之后主主机获取光强数据。获得所有数据后,主机对超声数据运用三点定位算法进行处理,获得位置节点的坐标信息;对光强数据进行对比分析,得出光信标的相对方向。最后将处理完的数据发送至PC端,完成一次循环。
图9所示的流程图为从机程序的流程。程序开始后,首先进行初始化,随机程序进人接收数据模式,当接收到主机的定位数据时,从机发送相应的数据到主机,完成一次循环。
4 TOA与定位算法
本文采用TOA获取距离信息。当需要获取未知节点的位置信息时,未知节点通过无线信道向信标节点发送定位信号,同时通过超声模块向信标节点发送超声定位信号。由于超声波的传输速度远低于无线传输速度,所以无线电定位信号将先到达信标节点。一旦信标节点接收到无线定位信号,立即启动定时器,并在随后接收到超声波定位信号时停止定时器。这样就能获得无线信号和超声信号到达信标节点的时间差。在测量距离短的环境中,无线信号的传输速度非常快,远远高于超声波信号的速度,无线信号的传输时间可以忽略不计。这通常需要从未知节点到信标节点的时间。并通过无线通道将时间传回未知节点。其过程如图10所示。
猜你喜欢
现代电子技术(2016年24期)2017-01-19
现代电子技术(2016年24期)2017-01-19
中国新通信(2016年16期)2016-10-18
