
低成本高可靠永磁无刷直流电机伺服控制系统设计
2018-03-31 12:22呼明亮严会会
电脑知识与技术 2018年6期
呼明亮 严会会

摘要:该文所设计的永磁无刷直流电机伺服控制系统采用sT公司的8位低成本高性能单片机STM8S105实现电机控制算法,功率驱动电路采用TI公司的DRV8301芯片实现功率驱动电路和控制器工作电源变换,采用LTC公司的电源专用芯片LTC4364-1实现电源过压、欠压和过流故障保护,并配置位置传感器,可满足高精度伺服控制需求。实验结果表明,该文设计的系统具备结构简单、成本低、可靠性高的特性,可广泛应用于中低压永磁无刷直流电机伺服控制系统。
关键词:永磁无刷直流电机;驱动;保护;可靠性
中图分类号:TP202 文献标识码:A 文章编号:1009-3044(2018)06-0192-03
永磁无刷直流电机因其结构简单、启动力巨大、调速性能好、功率密度高、易维护等诸多优点,而被广泛应用于工业控制、精密仪器、机器人、电动汽车、航空航天等领域。传统的永磁无刷直流电机驱动系统硬件电路一般采用分立器件或功率驱动模块(IPM)方式实现,其电路设计复杂、体积大、可靠性低和灵活性较差,同时其价格较为昂贵,不适用于批量生产。
本文设计了一套低成本、高可靠永磁无刷直流电机伺服控制系统,控制器采用ST公司的8位高性能单片机STM8S105实现电机控制算法,功率驱动电路采用TI公司的DRV8301芯片实现功率驱动电路和控制器工作电源变换,采用LTC公司的电源专用芯片LTC4364-1实现电源过压、欠压和过流故障保护,系统配置电机电流检测模块、输出状态采集模块、霍尔位置传感器采集模块和正交编码器位置状态采集模块,用于提高电机控制精度和可靠性,电路设计简洁、完备,通用性好,扩展性强,可广泛应用于中低压永磁无刷直流电机伺服控制系统。
1总体设计
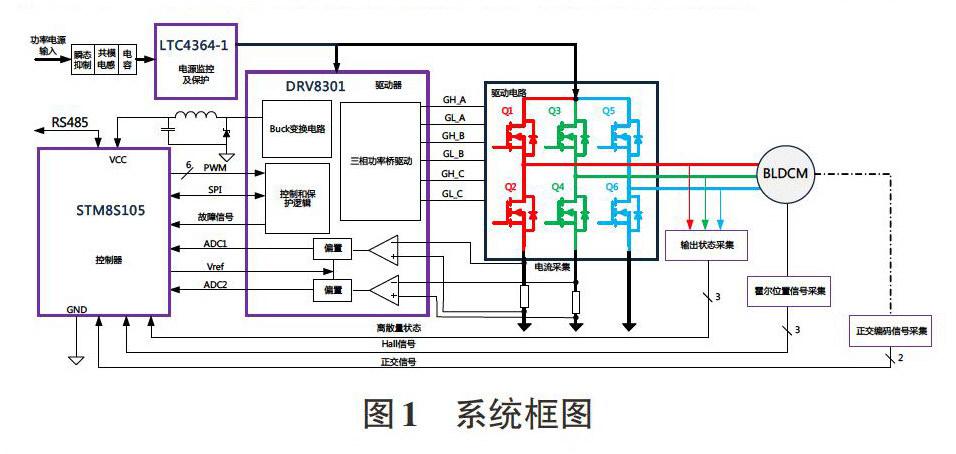
永磁无刷直流电机伺服控制系统框图如图1所示,系统主要包括电机控制器模块、三相功率桥驱动模块、功率模块、霍尔位置传感器检测模块和输出状态采集模块。控制器通过RS485通讯总线接收上位机发送的电机转动命令,依据霍尔位置传感器和正交编码器输出的转子位置进行逻辑运算,并结合电机电流产生PWNM功率驱动信号,经驱动器和功率模块变换实现功率信号放大,作用至电机绕组,控制电机按照给定转速和转动方向转动,实现精确伺服控制。控制过程中,电源监控模块实时监控功率电源过压、欠压和过流状态,实现功率电路保护。输出状态采集模块周期监控功率电路输出状态,参与BIT逻辑运算,实现电机故障诊断。
2硬件设计
2.1控制器电路设计
控制器电路的主要功能是结合电机位置状态反馈信号、电机相电压、相电流等信号实现电机控制算法。本文采用意法半导体公司专门针对电机控制推出的8位高性价比单片机STM8S105实现电机算法控制。图2所示为控制器最小系统。
其工作频率可达16MHz,宽电压工作:2.95V-5.5V,温度范围-40℃~125℃,采用三级流水线哈佛架构,具备丰富的外设资源,包括7通道10位A/D转换器,转换时间小于5微秒,1路SPI接口,1路PC接口,配置25路独立通用输入输出接口,芯片开发资源丰富,技术支持完备,且价格低廉,特别适用于低成本、高性能永磁无刷直流电机伺服控制系统开发。
芯片配置4路定时器,其中定时器1为16位高性能控制定时器,利用其互补输出、死区控制和中心对齐PWM方式,该定时器可被用于产生PWM斩波信号,定时器1发出的PWM信号经功率驱动电路作用至上桥功率管,GPIO发出的控制信号经功率驱动电路作用至下桥功率管。
2.2驱动电路设计
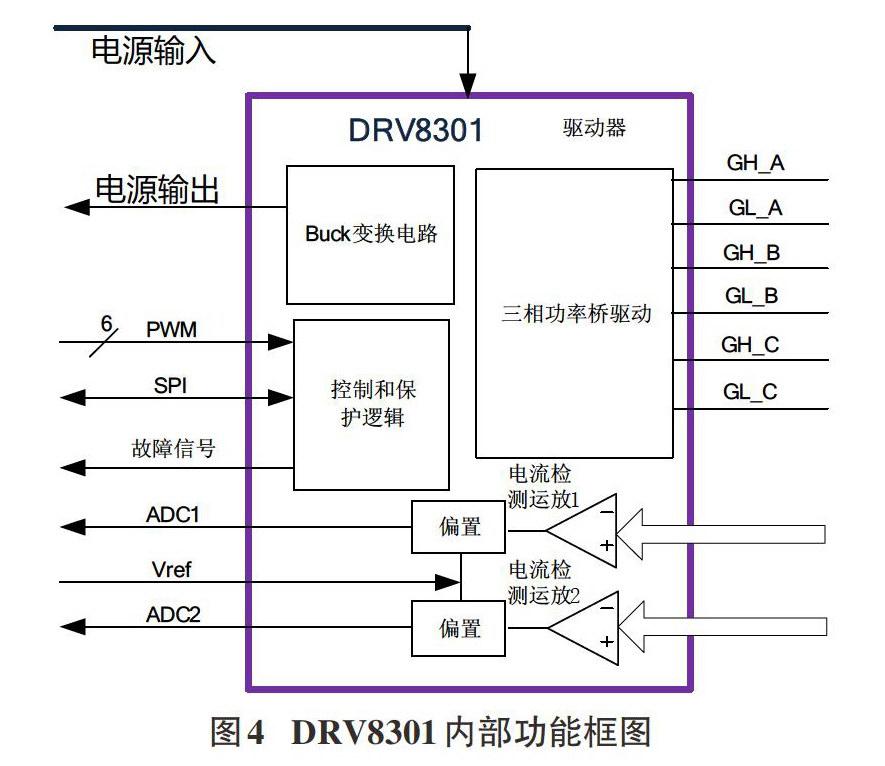
驱动电路的主要功能是将控制器发出的驱动信号,经放大,控制功率MOSFET开通和关断,为电机提供三相电流。DRV8301是11公司专门针对三相电机驱动应用的柵极驱动器,芯片内部集成死区电路,具备电源电压欠压、过压保护,电流过流、过热保护等功能,保证系统可靠工作。芯片可驱动6路N沟道MOSFET场效应管,支持宽电压范围(6V到60V)工作,最大峰值灌电流2.3A,拉电流1.7A。芯片运用自举技术简化了硬件结构,省去了多路辅助电源。DRV8301驱动芯片内部功能框图如图4所示,主要包括Buck变换电路、控制和保护逻辑、三相功率桥驱动和两路电流检测运放。
DRV8301内部集成了Buck变换电路,与TPS54160功能相同,供外部控制器或其他模块供电,驱动能力为1.5A。Buck变换电路与芯片内部其他功能独立,驱动电路故障情况时,电源芯片正常工作,保证了系统的可靠工作。DRV8301还包括两路电流检测放大电路,实现电机相电流的精确放大,运放通过偏执电压设置,支持双向电流检测,运放检测电路可通过SPI实现放大增益配置,从而满足不同电压范围采集要求,提高采集精度。
2.3电源监控电路设计
永磁无刷直流电机伺服控制系统中,电源必须支持短暂持续时间的高压浪涌,同时必须对电机负载实现过电压瞬变的保护,并提供继续运行能力。系统选用凌力尔特公司的专用芯片LTC4364实现。LTC4364专为抑制高压浪涌和抑制输出电压而设计,具有理想二极管特性,保护负载免遭高电压瞬变的损坏。LTC4364芯片的HGATE管脚驱动N沟道MOSFET(V1),以限制电源瞬变或过流过程中输送至负载电路的电压和电流。正常情况下处于导通状态,并提供低阻抗通路;而在过压和过流情况下负责耗散功率。DGATE管脚驱动另一个N沟道MOSFET(V2),替代实现反向输出保护和输出电压保持功能的肖特基二极管,实现电源输入防反保护,并在输入短路时,隔断反向电流。LTC4364通过监测SENSE引脚和OUT引脚之间的电阻电压,实现过流保护,当二者之间的电压差大于50mV时,将关断V1场效应管。LTC4364可精确地监视输入电源的过压(0V)和欠压(UV)情况,计算公式分别为公式(1)和公式(2)。LTC4364电路原理如图5所示。
2.4位置信号采集电路设计
永磁无刷直流电机伺服控制系统低速时速度和位置测量容易失真,系统一般结合霍尔传感器和光栅编码器(磁编码器或旋转变压器)实现电机转速范围位置、速度和加速度状态信息反馈。系统选用MAXON公司的4096CPT,双通道线性正交编码器作为速度和位置反馈,电路交联图如图6所示,正交编码器发出的差分信号,经SM3490转换后送入FPGA,FPGA依据A、B信号间的相位关系,判断电机转动方向,通过计算A、B信号的频率,获取电机转速,通过记录A、B信号的脉冲个数,获取电机绝对位置。
3软件设计
永磁无刷直流电机伺服控制系统通过实时采集电机位置、速度和电流信号,实现电机精确伺服控制,系统通过定时器TIM1实现PWM脉宽调制,达到对电机的稳定控制,整个控制系统软件包括主程序和中断服务程序等。主程序用来完成控制系统的时钟、I/O端口、定时器等部件的初始化、电机运行和故障诊断等工作。中断程序中通过读取三个霍尔传感器状态获取电机转子的位置信息,查表1获得换向逻辑,中断服务程序软件流程图如图7所示。
4实验
实验采用MAXON公司的三相永磁无刷直流电机EC60作为被控对象,参数如下:额定功率PN=1,5kW,相电流Iph=2.4A,极对数P=7,额定转速600r/min,定子相电感L=1.4mH,电子相电阻R=0.504Ω,转矩常数KT=0.132N/mA。图8所示为电机相电压波形,图9所示为电机相电流波形,实验结果证明,本文设计的控制系统能够满足永磁无刷直流电机伺服控制要求。
5结论
本文所设计的永磁无刷直流电机伺服控制系统采用ST公司的8位高性能单片机STM8S105实现电机控制算法,功率驱动电路采用TI公司的DRV8301芯片实现功率驱动电路和控制器工作电源变换,采用LTC公司的电源专用芯片LTC4364-1实现电源过压、欠压和过流故障保护,并配置位置传感器,可满足高精度伺服控制需求。本文设计的系统具备结构简单、成本低、可靠性高的特性,可广泛应用于中低压永磁无刷直流电机伺服控制系统。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
上海质量(2019年8期)2019-11-16
铁道通信信号(2019年4期)2019-10-10
电子制作(2017年2期)2017-05-17
现代园艺(2016年17期)2016-10-17
现代园艺(2016年17期)2016-10-17
通信电源技术(2016年1期)2016-04-16
电测与仪表(2015年6期)2015-04-09
风能(2015年9期)2015-02-27
