
面向稀疏路网车辆行驶安全的瞬态纵向最优化识别区域模型研究
2018-04-03 01:17周劲草马玉春
东北师大学报(自然科学版) 2018年1期
周劲草,马玉春,魏 朗
(1.长安大学汽车学院,陕西 西安 710064; 2.新疆大学机械工程学院,新疆 乌鲁木齐 830046; 3.长安大学公路学院,陕西 西安 710064)
0 引言
我国内蒙古、西藏和新疆地域辽阔,在这些区域的道路网普遍呈现稀疏特性.稀疏路网工况作为一种特殊高速道路工况,该类稀疏路网的特点是路网密度低、道路连通度差、道路车流量小、车辆运行车速较快,道路技术等级整体偏低,且往往处于人口稀少区域.[1]一旦发生事故不易被发现,事故死亡率较高,因此如何降低交通事故的发生显得尤为重要.
随着科学技术的发展,机器视觉技术在提高车辆主动安全行驶中得到了广泛的应用.[2-4]文献[5-6]采用了单目视觉进行纵向安全距离测量的算法,给出了一种基于单目视觉的智能车辆前方障碍物识别与测距方法,该算法实现了纵向距离低于50 m障碍物距离测试,然而在50~100 m内却无法进行测量.上述算法只能运用于低速行驶的城市道路,却无法运用于稀疏路网工况.为解决这一问题,文献[7]给出了一种基于拟合的高速道路单目视觉测距算法,该算法实现了10~100 m范围内的障碍物纵向安全距离测算,使得单目视觉测距技术能够运用于高速行驶工况下的高速道路,然而该算法在测量距离大于70 m测量误差很大,不能运用于稀疏路网工况下的纵向安全距离测算.
针对上述问题,本文首先建立了两种常见发散态纵向识别区域模型,依据车辆操纵稳定性仿真进行了优化分析,并获取瞬态纵向最优化识别区域模型,量化了稳态成像焦距值与检测范围关系;其次基于Carsim完成了复杂路况下的制动距离多样化分析,并由修正安全制动距离计算出了最优化识别区域模型对应的稳态成像焦距值.
1 瞬态纵向最优化识别区域模型
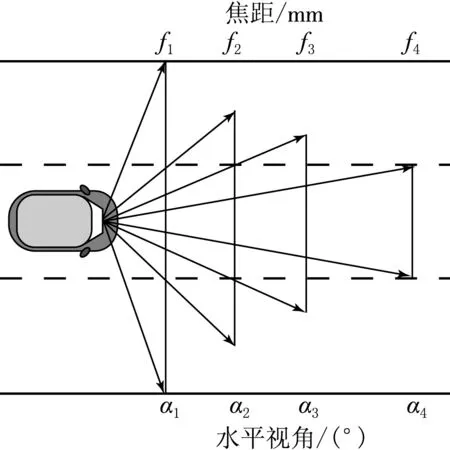
图1 车载视觉成像范围与水平角关系
如何恰当的选择检测区域,对于后续车辆检测十分重要.合适的兴趣检测区不仅能够降低计算量,而且能够有效排除如路牌等物体的干扰进而提高识别的准确性.目前市场上流行的行车安全预警设备所采用的鱼眼视角虽然能够有效覆盖城市道路工况,若不加改进而应用于稀疏路网工况,不仅会造成对非兴趣区域的过识别,而且还会忽略有效纵向安全距离内目标的识别.当车辆所载视觉感知设备选用不同焦距时获取到的检测范围会有所不同(如图1所示).为了获取适合于稀疏路网工况下的最佳行车检测区域及所对应的焦距值,本文结合车辆操纵稳定性原理及麋鹿实验对两种发散性纵向识别模型进行了分析,并提出收敛性瞬态最佳纵向识别区域模型,再根据稀疏路网固有特性及多附着系数态工况下的车辆制动仿真,最终得出适用于稀疏路网工况下的最佳行车检测区域.
作为一种特殊高速工况的稀疏路网,事故的发生多由于驾驶员疲惫驾驶或未能及时注意前方出现的车辆造成.当车载视觉传感器焦距选择过小,会出现如图2所示的纵向过识别区及纵向欠识别区.
当车载视觉传感器焦距选择过大(如图3所示),此时虽然提高了纵向行驶区域的检测范围,然而却会疏漏横向邻域内的检测,造成横向漏识别区.
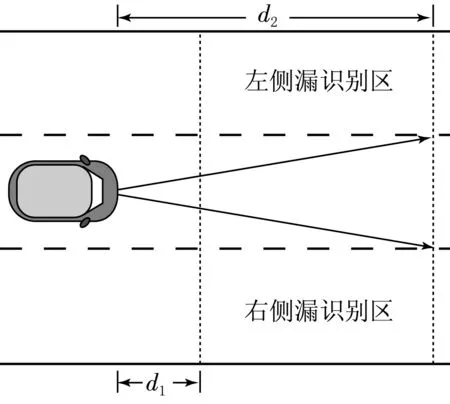
图2 纵向发散态识别区域模型 图3 横向发散态识别区域模型
图2和3中:d1,d2和d3分别为车辆纵向临界制动距离、纵向最大制动距离和视觉传感器有效检测域值距离,S为车道总宽度.该模型下车辆有效监测域Se=(d3-d1)×S,过监测域So=d1×S,弱监测域Sw=(d2-d3)×S.由于采用过小焦距,使得在弱监测区域内所检测图像像素较低,不利于纵向距离的准确计算.在高速行驶中,因为驾驶员对于前方较近距离内车辆保持警惕,此刻视觉预警不仅没有起到实际提醒作用,而且会增加驾驶员的紧张情绪.

当车辆由于换道行使,监测盲区突然出现在纵向监测区域内时,驾驶员会因有效制动距离不足,对方向盘施加一个激增力矩,以试图规避障碍物.为了研究这种激增力矩对于行车安全的影响,本文基于Carsim进行了模拟实验,采用D级车、SUV和卡车3种常见车型,模拟道路工况为路面附着系数φ1=0.2的雪天和φ2=0.4的雨天工况,模拟输入力矩为250 N·m,采用麋鹿实验[8-9]分析各种车辆规避前方障碍过程.实验道路采用如图4(a)所示的曲线行驶道路,部分仿真结果如图4(b)所示.
图4(b)中Target所代表的是设定行驶路线,其余曲线代表不同车速及路面附着系数所对应的车辆实际运动轨迹.计算公式为
(1)
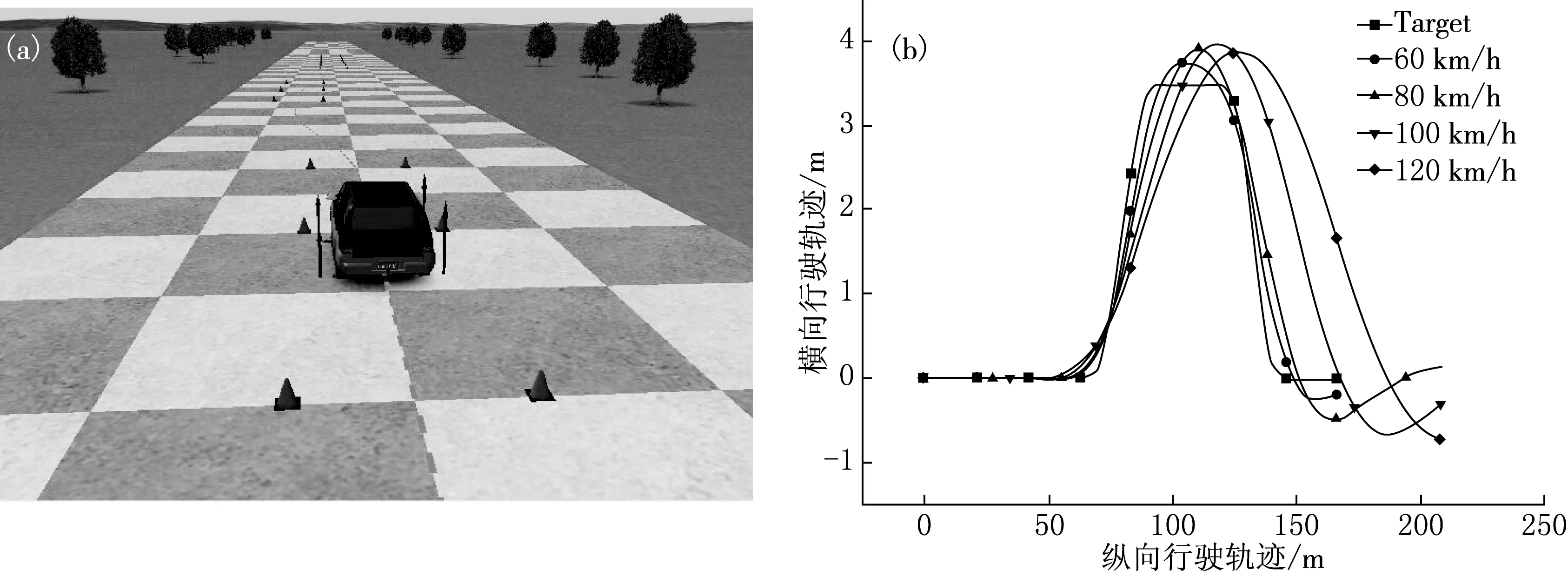
图4 曲线行驶道路(a)及部分结果(b)
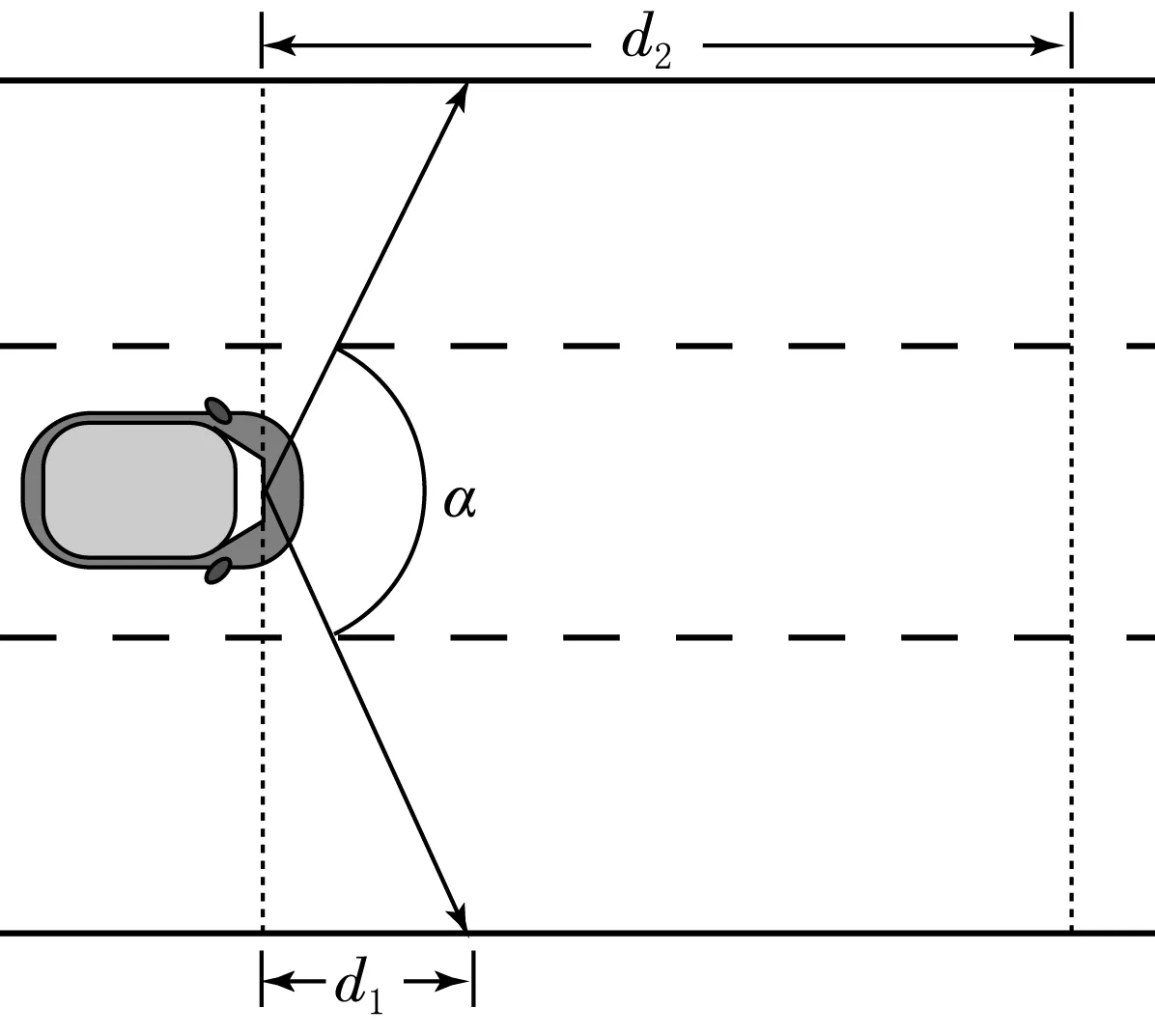
图5 收敛态纵向预警区域模型
因此上述车辆的发散态纵向识别区域不能够满足稀疏路网工况下车辆纵向预警需求.为解决该问题,提出了如图5所示的收敛态纵向预警区域模型.

2 车辆有效制动域模型
为得到稳态成像焦距值,必须获取最小制动距离d1;为提高算法安全度,首先建立有效制动区域模型并基于Carsim进行模拟仿真获取临界制动区域;为提高安全系数进行临界制动域修正.
2.1 有效制动区域仿真
车辆在稀疏路网下行驶时,从t时刻驾驶员在Xn(t)处发现前方车辆到采取相应的制动措施,经历Δtn时间后静止于相距前车d0的Xn(t+Δt)处,这一过程见图6.
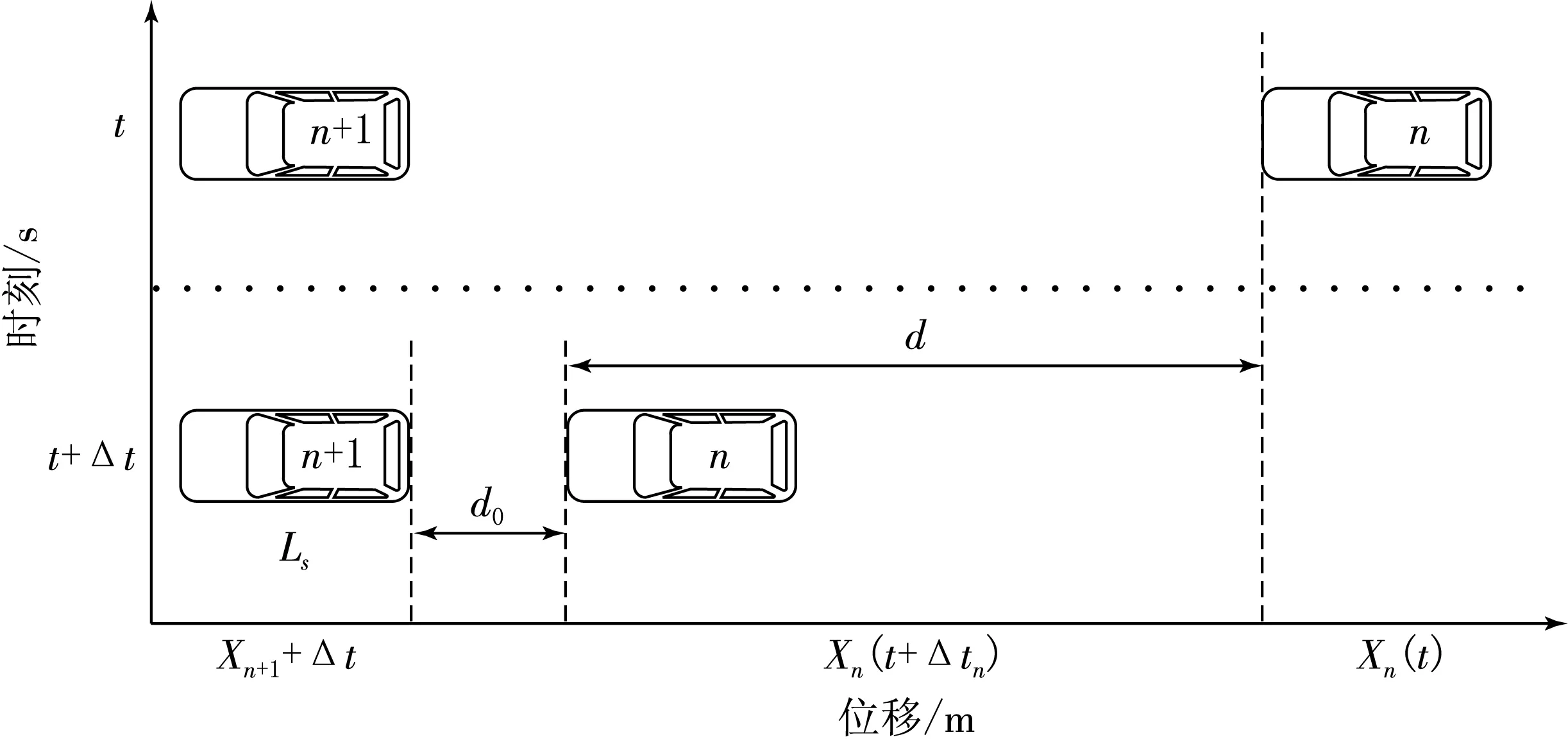
图6 高速道路避险制动行驶示意图
当t时刻驾驶员发现前方出现静止障碍时,试图采用阶跃制动力矩使车辆由初始车速静止,为研究不同车辆在道路附着系数工况下的制动距离,本文基于Carsim软件进行了模拟实验,采用D级车、SUV、卡车及轻型皮卡4种常见车型,模拟道路工况为路面附着系数φ1=0.2的雪天和φ4=0.8的干燥道路2种极限工况,采用开环控制的阶跃制动力矩进行研究.实验道路采用制动距离测试道路,初始车速分别设定为120,90,和60 km/h.仿真道路设置及部分结果如图7所示.

图7 仿真道路设置(a)及部分结果(b)
2.2 有效制动区域修正
由于Carsim中仿真仅仅考虑由车辆本身参数及路面附着系数所决定的制动工况,然而在实际道路行驶中,必须考虑驾驶员反应时间及安全停车间隙等问题,因此在上述仿真结果基础上加入保险系数(η)、停车间距(d0)及反应时间(t).采用公式
d*=η(vt+Sb)+d0
(2)
所示的安全跟车距离进行修正计算[10].其中:d*为安全车距;η为保险系数,取值范围是1.05~1.1,本文取1.1;v为两车相对车速,假设前车静止,此时v等于初始车速;Sb为仿真所得车辆制动距离;d0为停车后两车间距,本文取值为5 m;t为反应时间,反应时间包括驾驶员发现紧急情况采取制动的反应时间和制动器反应时间之和,受驾驶员年龄、驾驶经验以及车型的影响,文献[7]指出我国驾驶员平均反应时间取值范围通常是0.73~0.93 s,本文取值为0.93 s.
令图7中车辆制动曲线函数为f(t),则最小制动距离d1计算公式为
(3)


表1 最佳车载视觉成像焦距 mm
3 实验及分析
为获取最佳车载视觉成像焦距值在单目视觉测距精确值,采用双静态实验-单目视觉设备保持静止,靶源测试板静止.实验场地为干燥、平坦及清洁的沥青混凝土路面,坡度路面小于2%,直线实验长度为100 m.
实验硬件采集系统:海康威视DS-2CD4010FWD图像采集器、联想L197WA显示器、i-Ei TANK-820工控机、科电KD65-12蓄电池、纽福克斯7962NB逆变器及信息辅助采集装置、尼康D 90,最高分辨率4 288像素×2 848像素(见图8(a)).
软件系统采用自行编写的基于Visual C++和OpenCV计算系统(见图8(b)).
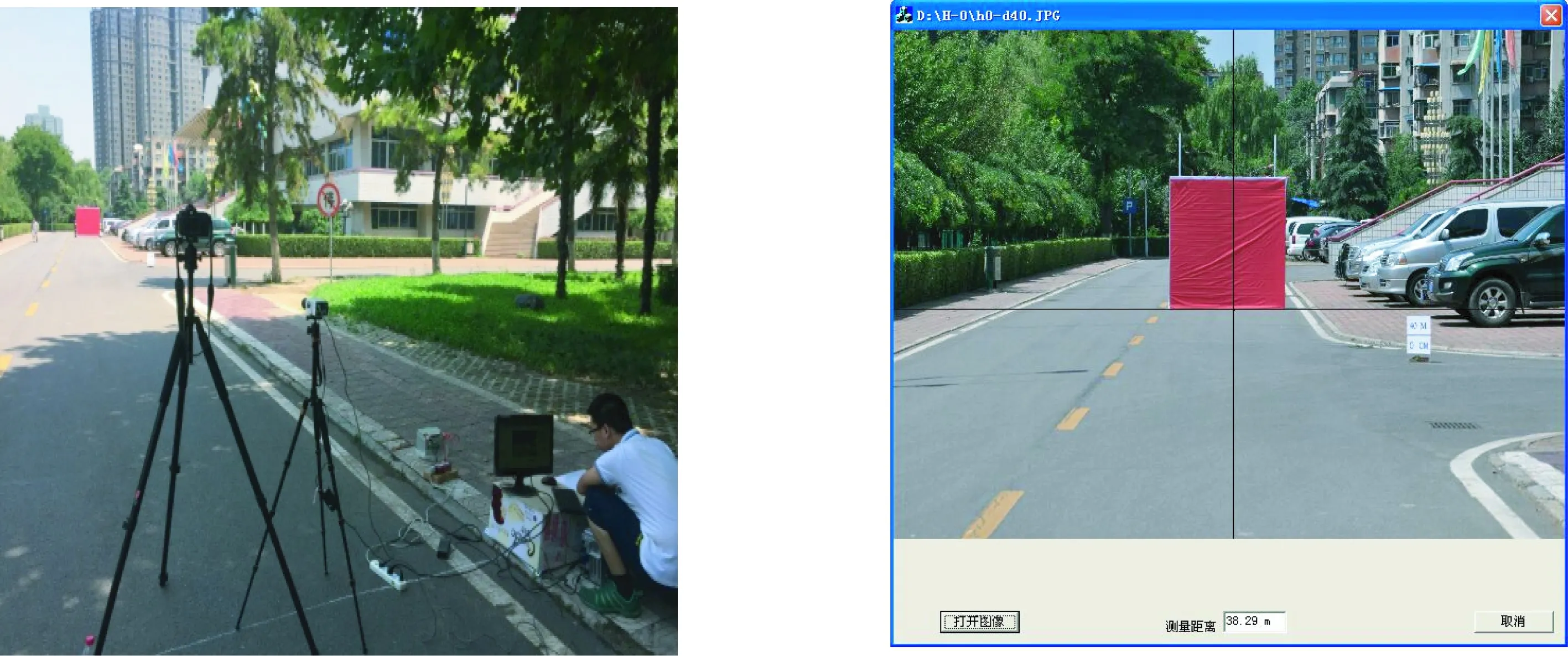
(a)信息实时采集系统 (b)纵向安全距离实时计算系统
所用图像采集设备均属于APS-C画幅,因此初始焦距均设定为82 mm.部分实验结果如图9所示.

图9 实验测定的部分结果
为说明文中给出的算法能够有效单目视觉纵向测距精度,以文献[6-7]所述算法进行对比,结果如表1所示.

表2 测量结果对比 m
测量误差对比如图10所示,本文算法的相对测量误差(Relative Error,RE)和绝对误差(Absolute Error,AE)远远低于文献[6-7].文献[6]虽然在60 m之内具有较高准确性,然而大于60 m距离进行测量的相对误差较大.文献[7]测量相对误差随测量距离增大而迅速增大,当测量距离大于70 m时,绝对误差已经远远超过20 m.这是因为在进行单目视觉测距时为覆盖非兴趣监测区域而选择过小的检测焦距,在进行高纵向图像特征点坐标逆换算时造成曲线拟合发散.
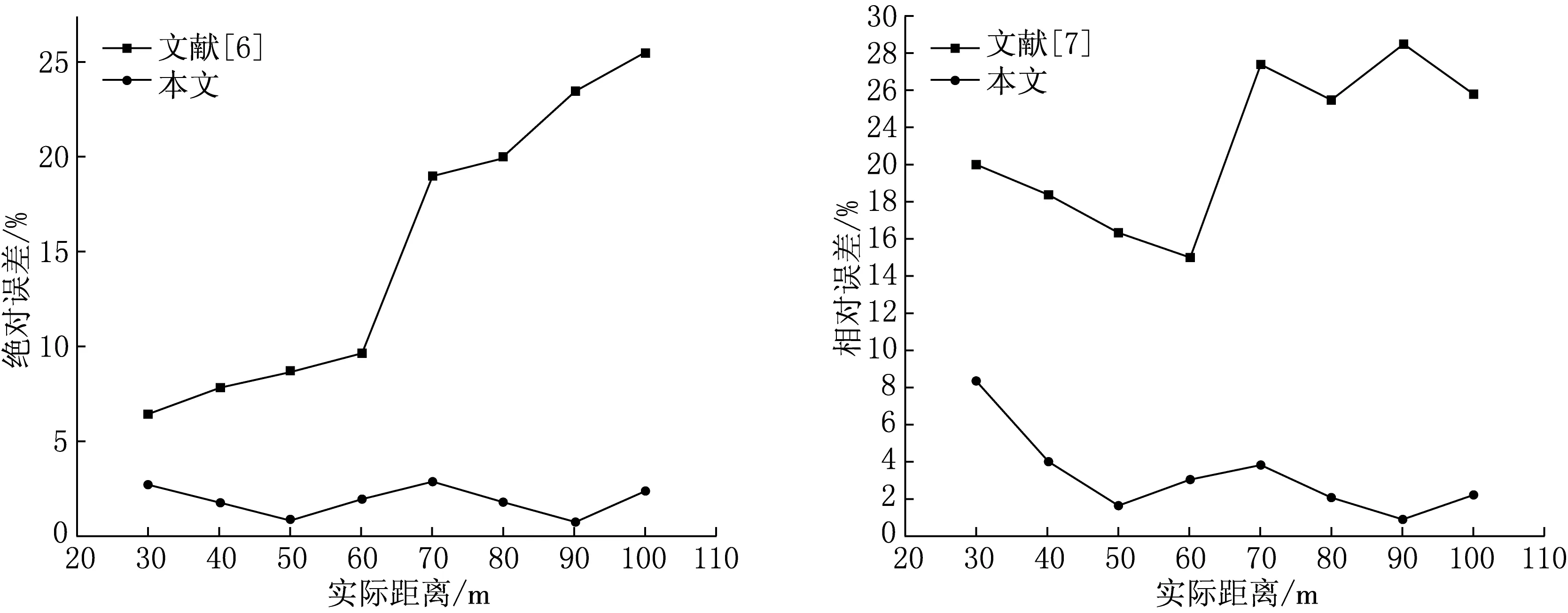
图10 本文算法与文献测量误差的对比
4 结语
由收敛态纵向预警区域模型所得车载视觉成像设备焦距,能够有效提高高速道路纵向行车安全距离计算精度,更加符合稀疏路网工况实际要求.
[参考文献]
[1]刘晓锋,常云涛,王珣.稀疏路网条件下的无人飞机交通监控部署方法[J].公路交通科技,2012,29(3):124-129.
[2]WEN X,SHAO L,FANG W,et al.Efficient feature selection and classification for vehicle detection[J].Ieee Transactions on Circuits & Systems for Video Technology,2015,25(3):508-517.
[3]REZAEI M,TERAUCHI M,KLETTE R.Robust vehicle detection and distance estimation under challenging lighting conditions[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2723-2743.
[4]CHEN Y L,WU B F,HUANG H Y,et al.A real-time vision system for nighttime vehicle detection and traffic surveillance[J].IEEE Transactions on Industrial Electronics,2011,58(5):2030-2044.
[5]袁雨桐.基于单目视觉的智能车前方障碍物识别与测距[D].长春:吉林大学,2016.
[6]郭磊,徐友春,李克强,等.基于单目视觉的实时测距方法研究[J].中国图象图形学报,2006,11(1):74-81.
[7]刘永涛.基于环境感知技术的客运车辆危险行驶状态辨识技术研究[D].西安:长安大学,2015.
[8]刘喜东,刘应东.考虑转向速度的汽车操纵稳定性分析[J].机械工程学报,2011,47(10):95-100.
[9]熊璐,陈晨,冯源.基于Carsim/Simulink联合仿真的分布式驱动电动汽车建模[J].系统仿真学报,2014,26(5):1143-1148.
[10]徐杰,杜文,孙宏.跟随车安全距离的分析[J].交通运输工程学报,2002,2(1):101-104.
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2018年12期)2018-08-01
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年4期)2017-11-23
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21
