基于西安高新区循环工况的纯电动城市客车动力系统匹配及仿真研究
2018-04-04 07:49李耀华陕西工业职业技术学院汽车工程学院陕西咸阳7000长安大学汽车学院陕西西安70064
西华大学学报(自然科学版) 2018年2期
杨 阳,李耀华,刘 鹏(. 陕西工业职业技术学院汽车工程学院, 陕西 咸阳 7000;.长安大学汽车学院, 陕西 西安 70064)
汽车行驶工况对汽车的经济性分析、动力系统参数匹配、排放检测及控制策略优化具有重要作用,是汽车行业的一项共性基础技术[1]。由于我国幅员辽阔,各地区的行驶工况与当地的交通状况有着密切关系,一个地区的典型循环行驶工况能够较准确地反映车辆在行驶中的实际行驶工况。
纯电动汽车动力系统参数的合理配置直接影响着车辆的整体性能水平。目前,纯电动汽车根据不同的目标和要求进行参数匹配,主要分为以下几类:以动力性为主要匹配和优化目标,针对某一总成部件进行以经济性为主要目标的优化匹配,从整车需求角度进行动力系统参数的综合优化[2]。根据车辆行驶特点中具有代表行驶特性的主要参数(最大速度、最大加速度、最大减速度、平均加速度、平均减速度参数等)进行纯电动城市客车的动力系统匹配。
本文利用试验器材Race-Technology真实记录车辆行驶工况中的特征参数,进行大量的路线数据统计分析,构建了具有一定代表意义的纯电动城市客车的循环行驶工况[3]。
目前,许多城市循环行驶工况主要由加速、减速和低速下的怠速组成。已经构建的城市循环工况数据采集以及传统汽车都不能真实反映电动汽车的加速性能;因此,有必要构建电动汽车循环行驶工况,并对电动汽车在实际行驶过程中的性能做出有效评价[4]。
1 构建循环行驶工况
本文主要以西安市城市客车为研究对象采集行驶参数,满足公交车适合单一地区区域运营的需要,基于公交车行驶路线固定的特点,建立基于固定线路的车辆行驶工况,为纯电动公共交通车辆的动力系统参数匹配设计优化奠定基础[5]。
1.1 参数采集仪器
利用试验器材Race-Technology采集车辆行驶过程中的主要行驶特征参数是构建循环行驶工况的数据来源。根据西安市区域交通特征,其覆盖路网主要为水平道路,所以数据采集仪的坡度设置不必进行从新设置[6]。
试验器材Race-Technology是用来记录车辆行驶过程中的特征参数瞬时速度、瞬时加速度、瞬时间速度、行驶里程时间关系以及三维坐标等相关数据,仪器包括GPS位置采集器、数据存储卡、电池等,如图1所示。

图1 试验仪器
西安市高新区目前运营的纯电动公交路线主要以12 m的BYD-K9纯电动公交车为主,本文选取此车作为试验车辆,采集所需的各项数据,试验车辆如图2所示。

图2 试验车辆
1.2 车辆行驶参数采集
道路试验是根据固定的公交线路采集试验数据,选取的公交车辆在正常的行驶状况下,并且乘客在每个公交站点自由上下。在采集试验数据的时候,采集仪器的磁块GPS须正向垂直放置于车顶上面用于接收位置信息。车辆启动时开始采集数据,车辆行驶到起始站时停止采集。仪器的采集数据频率为100 Hz,其记录的主要参数有车辆横向、纵向、垂直方向的加速度,车辆行驶时间、瞬时车速、行驶瞬时加速度、行驶里程、位置信息等相关参数。试验采集数据车辆须往返4次,采集数据主要集中在早、中、晚,基本包含了车流量的高峰时段与低峰时段。
因此,道路采集数据试验可以实时、准确、快捷地采集到大量相关有效车辆行驶数据,包括行驶车辆瞬时行驶的速度数据和车辆试验道路特征参数等,这些数据为研究构建循环行驶工况的数据。
1.3 循环工况的构建
根据不同的行驶状况和交通条件,车辆的循环行驶工况构建目前主要基于以下几种方法:短行程分析法、定步长截取法、速度加速度矩阵分析法和马尔科夫方法。车辆行驶工况的开发过程中引入主成分分析法进行交通特征分析,使得反映道路交通特征的车速、加速度等多个短行程特征值都得到考虑的同时又简化了所分析的问题[7]。
本文通过对以上行驶工况构建方法的研究,最终选取短行程分析法作为循环行驶工况构建方法[8]。
短行程分析法的具体构建流程如下:
1)利用数据采集仪Race-Technology采集车辆行驶过程中的实时数据;
2)利用MATLAB编程进行站点运动区间的分割,获得短行程片段;
3)利用MATLAB编程计算提取短行程特征参数值;
4)采用统计分析软件SPSS对分割的众多短行程片段进行主成分分析和聚类分析,对短行程片段提取特征参数中的主成分及贡献率实现降维处理,其次对具有代表性的低、中、高速行驶片段进行聚类;
5)根据不同短行程片段的数据、特征和各类片段在总体中所占比例,提取并重新合成满足目标工况长度要求的短行程片段,构建典型循环工况。短行程瞬态工况构建流程如图3所示。
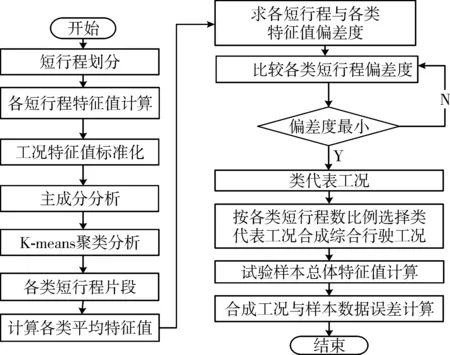
图3 短行程瞬态工况构建流程图
根据以上方法处理后的数据合成西安市市区城市客车行驶工况如图4所示。
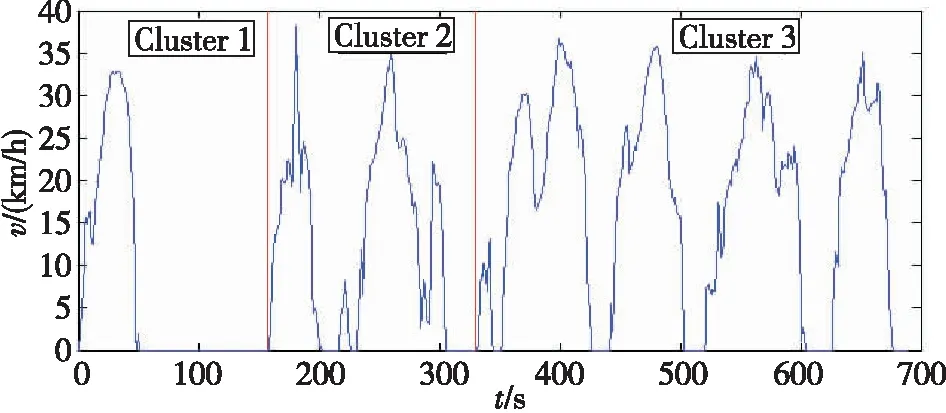
图4 西安市市区城市客车行驶工况(XATD-HBUS)
2 纯电动城市客车动力系统匹配
电动汽车的动力系统主要由驱动电机、动力电池、传动系统3个模块组成。提高行驶里程和降低开发成本,则需要对动力系统的参数进行合理的匹配。现阶段,为增加电动汽车的续航里程、提高动力性能,动力电池和其他关键技术已有了重大突破,针对电动汽车动力系统各模块的参数合理匹配研究是目前急需解决的关键技术[9]。
目前市场运营的BYD-K9的相关参数如表1所示。
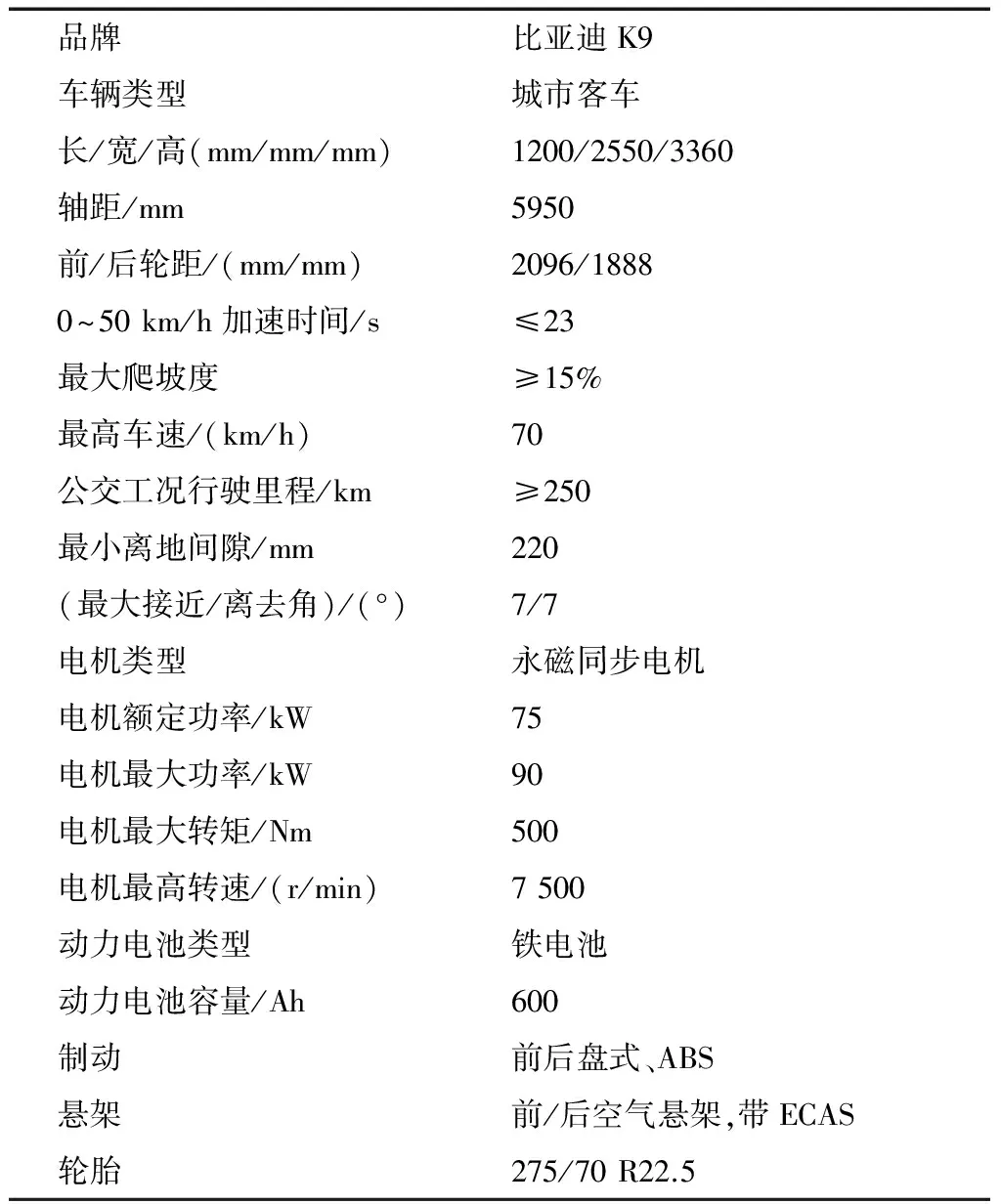
表1 BYD-K9基本参数
2.1 驱动电机参数的选择
2.1.1驱动电机类型的选择
驱动电机主要有以下几种类型:有换向器的直流电动机、无换向器的感应电动机、永磁电机、开关磁阻电动机。由于永磁无刷电机系统具有较高的效率与转矩惯量比,同时在电动汽车上逐渐被广泛应用;因此本文选取永磁式同步电机。
2.1.2驱动电机最大功率和额定功率的选择
由整车行驶时的动力性指标最高车速、最大爬坡度和加速时间可知,电动机参数的匹配选择必须满足上述动力性指标的每一项要求,即最大功率
Pmax≥max(Pmax1,Pmax2,Pmax3)。
不计坡道阻力时,最高车速下所需求的动力系统的最大功率为
式中:m为整车整备质量;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积。
以最低通过车速行驶在某一坡度路面时,动力系统的最大功率需求为
电动汽车起步加速过程可根据经验公式表示为
式中:x为拟合系数,通常取 0.5 左右;vm和tm分别为车辆的末速度和加速时间。
一般情况下考虑汽车在水平路面上加速,由汽车加速时的动力学方程可知,其瞬态过程总功率为
式中:δ为旋转质量换算系数,取1.06;dt为根据设计经验选取的迭代步长,通常选取步长为0.1 s。
汽车在加速行驶过程的末时刻,电机输出最大功率
根据车辆循环行驶工况的特征参数,将车辆参数带入公式求取满足行驶过程中的驱动电机的最大功率。综合考虑汽车行驶时的动力性要求,确定电动机最大功率
Pmax=max(Pmax1,Pmax2,Pmax3)=155.25 kW。
确定电机的最大功率取整为Pmax=160 kW。
在确定驱动电机的额定功率时,必须满足车辆行驶最高车速的最大功率,即额定功率
P额≥54.49 kW。
式中:λ为电机过载系数 (电机过载系数λ一般取 2~3)。
根据以上综合考虑,本文选取的电机额定功率为55 kW。
2.1.3驱动电机最大转矩和额定转矩的确定
驱动电机的额定转矩根据电机额定功率与额定转速计算确定,其计算式为
则电动机的最大转矩Tmax=λT。
本文选取λ=2时,计算出的电机最大转矩Tmax=300.14 Nm。
2.1.4驱动电机最高转速和额定转速的选择
电机恒功率区系数β即为驱动电动机的最高转速与额定转速之比,系数β对于电机在低转速区的转矩有较大影响,系数β越大在低转速区可获得较大的转矩,系数越小在低转速区的转矩较小。根据理想的电机特性曲线得知,恒功率区系数β的合理选取对车辆的动力性有一定的影响;但系数β越大电机的工作电流就越大,也会造成逆变器功率的损耗和尺寸的增大[10],一般取值2~4。本文综合考虑选取系数为2,控制电机的额定转速在2 250~4 500 r/min之间。
2.2 驱动电动机额定电压的选择
在对纯电动汽车驱动电机的额定电压参数选取时须考虑动力电池组的电压大小。由于功率的大小等于电压与电流之积,在输出功率一定时,对于电路中导线安全性考虑,适当增大电池组电压则可以减小电流,反之电压越小电流越大,较大的电压对电路中的连接导线及开关等元件要求相应降低;但是电压增大,需要串联的电池数量也需要增加,从而对整车的质量、动力性及成本都有一定影响[11]。
综合考虑上述情况下,确定驱动电机的额定电压为200~350 V,最终选取确定驱动电机的额定电压为336 V。
2.3 驱动电动机参数的确定
综合以上计算结果和分析,本文选取的电机具体参数如表2所示。
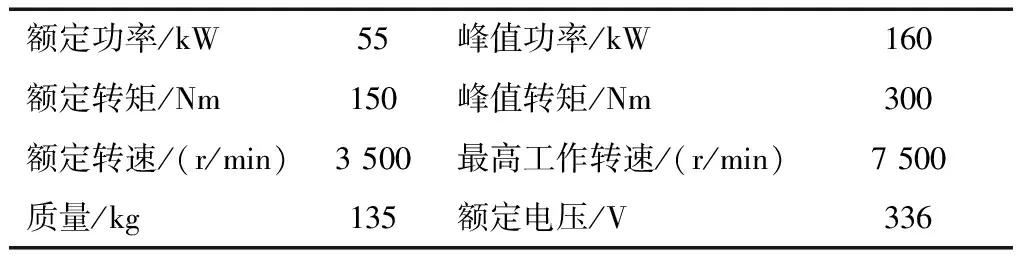
表2 驱动电动机参数
考虑单个电机质量、峰值功率过大,目前中国市场生产的商用车驱动电机还不能满足其性能要求,其次,由于BYD-K9采用的是轮边电机驱动的形式,无变速器传动轴等,所以在仿真对比的过程中无法与BYD-K9形成鲜明的对比结果;因此,采用与BYD-K9同样的动力传递布置方式,双电机驱动下的最终电机具体参数如表3所示。
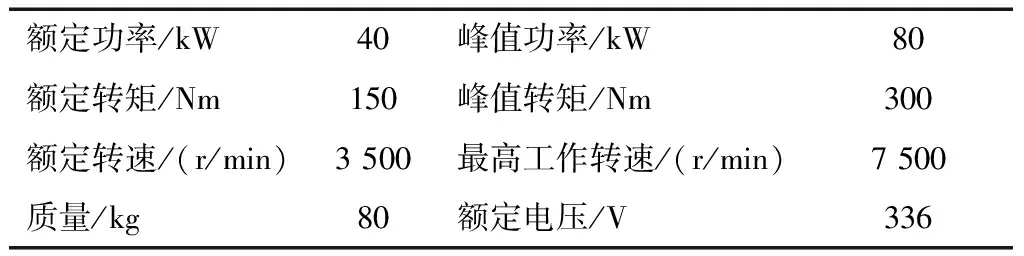
表3 驱动电动机参数
2.4 轮边减速器速比的选取
行星齿轮减速器结构紧凑,其减速比大,作为轮边驱动减速器是比较理想的选择,并且目前就国内外的技术水平,对机械减速器形式的可行性研究综合考虑,行星齿轮减速器被普遍认为具有良好的性能。
有行星齿轮机构的一般运动规律的特性方程为
n1+an3-(1+a)n4=0。
式中a为从动轮与主动轮的齿数比。
可以求出这3种结构方案的轮边减速器速比i13:
当太阳轮为主动件,行星齿轮架为从动件,而齿圈固定时,
当齿圈为主动件,行星齿轮架为从动件,而太阳轮固定时,
当太阳轮为主动件,齿圈为从动件,而行星齿轮架固定时,
式中:n1、n3、n4分别为太阳轮、齿圈、行星轮架的转速;z1、z3为太阳轮、齿圈的齿数。
根据汽车的传动特点,对于减速器的位置布置和合理的离地间隙应给予考虑。本文采用齿圈为主动件,行星齿轮架为从动件,太阳轮固定。
在满足转速、最大转矩的条件下,尽可能减小减速器的体积,方便布置,所以文中选取太阳轮、齿圈的齿数z1、z3分别为107和17(圆柱形齿轮齿数选取大于等于17,齿数啮合最好选取互为质数原则)。
根据上面选取参数,最终确定减速器速比6.29。
2.5 动力电池的参数匹配
为了满足整车行驶的动力性与续航里程的要求,对于电动汽车的动力电池系统的能量密度和功率密度都有较高的要求;其次应保证选取的电池组系统具有多次循环充放电后对电池整体的充放电特性影响不大;最后电池组应具有性价比高、放电稳定、免维护等特点。
2.5.1动力电池类型的选择
动力电池类型的选择应综合考虑不同类型电池的充、放电特性和其抗撞击安全特性来选取。近年来,锂离子电池的优越性能得到了广泛的认可,其具有良好的安全性能;因此,选取锂离子电池组作为纯电动汽车的动力源,根据以上要求综合考虑选取磷酸铁锂电池。
2.5.2电池组电压的选择
对于电池组电压的选取,首先应保证与电机额定电压相同,同时要满足在行驶过程中电机电压的不断变化;其次应考虑车辆在行驶过程中车载用电设备,所以确定电池组总电压应稍微大于电机的额定电压;最后为了避免影响车辆行驶里程由于电池低电压太早。综合考虑以上要求确定电池组电压为336 V。
2.5.3电池组能量的选择
在选取电池组能量时,主要根据纯电动汽车的续航里程、单体电池组规格来确定。随着车辆的续航里程的增大,电池组能量则相应的增大,电池组的体积、质量对整车的空间布置和装备质量都会造成影响。纯电动车辆的续航里程主要根据车辆行驶的工况或者恒速行驶耗能法测定。
本文的电池系统采用磷酸铁锂电池组(单个电池规格为3.2 V/200 Ah)作为纯电动汽车的动力蓄电池。本文根据恒速测定法假设车辆一次充满电时以va=25 km/h车速均速行驶的续驶里程不小于240 km,则其所需的功率可由下式计算:
经计算:P1=20.42 kW。
考虑车辆在行驶过程中的其他用电设备电能消耗,根据车辆行驶的里程与车载用电设备的功率大小,设定车辆行驶时车载用电设备开启消耗0.9 kW,则整个行驶工况消耗功率P2为21.32 kW。
根据理论计算车辆行驶里程S=240 km所需的电能为
W=P2·t=P2·(S÷va)=204.67 kWh。
根据行驶里程数和所需能量的要求选取电池的个数,计算公式如下:
W=n·η·u·C/1 000。
式中:n为电池个数;η为电池在放电过程中不能超过自身总电量的 80%,取 0.8;u为单个电池的电压,3.2 V;C为单个电池的容量,200 Ah。
根据计算得出所需电池数n为400.39,取整得n=400。由修正后的电池数得出车辆行驶里程S=240 km所需的电能W=205 kWh。
因此,本文选用单体电压为3.2 V、电池容量为200 Ah的单只磷酸铁锂电池400只。
由于n=400单体电池串联,总电压为1 280 V,对于安全防护保护措施要求极高;故选取串-并连的方式,105串4并的方式使总电压保持在336 V左右。
3 基于循环工况的参数匹配车辆仿真
3.1 整车仿真模型的搭建
利用软件中的模块搭建模型,并对各个模块中的仿真参数根据之前匹配的动力系参数录入,搭建整车模型,BYD-K9布置结构同双电机模型,如图5所示。
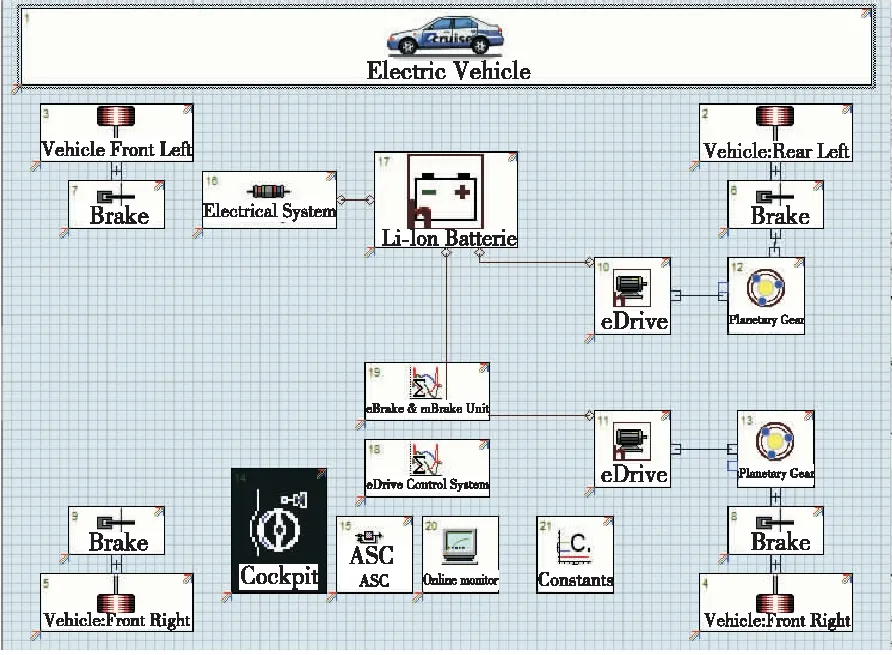
图5 仿真车辆模块搭建
3.2 动力性理论计算结果
牵引力与转矩的计算公式为
而转速与车速的计算公式为:
车辆在行驶过程中以变加速行驶,理论计算是以最大加速度匀加速行驶,加速度计算公式如下:
基于汽车恒功率区工作,根据公式得到汽车的最高车速ua=67.05 km/h。
最大爬坡度计算依据汽车行驶过程中的最大转矩和忽略空气阻力计算得最大爬坡度为19%。根据公式得汽车的理论最大加速度为2.03 m/s2。
3.3 动力性仿真结果
仿真结果如图6、图7所示。
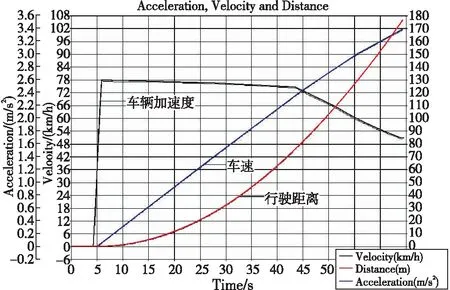
图6 匹配车辆动力性仿真结果
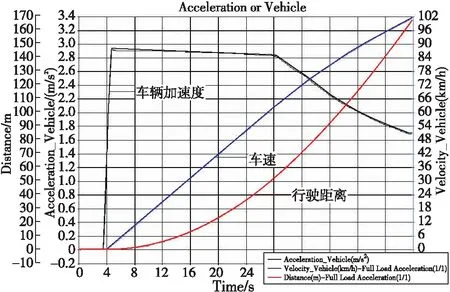
图7 BYD-K9动力性仿真结果
由仿真结果可知,起步加速阶段电机以最大转矩输出,完成起步加速后在恒转矩区工作,如图所示匹配车辆行驶过程中的最大加速度为2.59 m/s2,BYD-K9行驶过程中的最大加速度为2.96 m/s2。
车辆的最大爬坡度指车辆在行驶过程中以原地起步(半坡停车起步)或者以较低车速上坡时汽车在良好路面上的最大爬坡度。根据图8和图9得出匹配车辆及BYD-K9的最大爬坡度如表4所示。
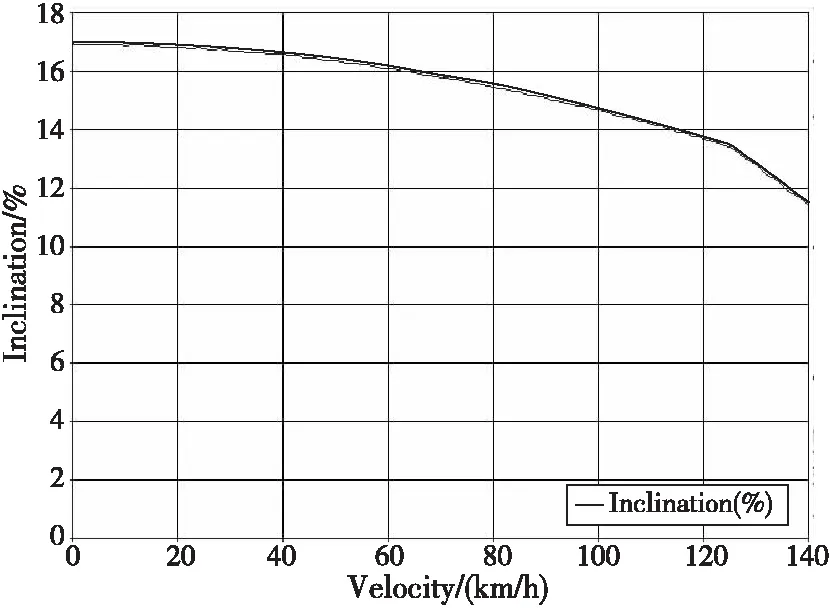
图8 匹配车辆的最大爬坡度
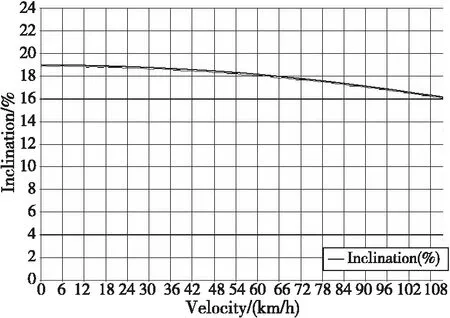
图9 BYD-K9的最大爬坡度
表4 车辆的最大爬坡度
3.4 经济性仿真结果
本文基于理论匹配后的车辆模型与高新区运营的BYD-K9在构建的循环工况下进行仿真验证,目的在于说明匹配优化后的电动车电能消耗明显小于BYD-K9纯电动城市客车,在动力性方面虽比BYD-K9纯电动公交车动力性稍差,但满足高新区行驶要求。
3.4.1循环工况图导入
利用仿真软件自带的循环工况表格格式Table editor对应的修改填入在构建西安市市区城市客车行驶工况(XATD-HBUS)时的数据,修改后的数据如图10所示[12]。
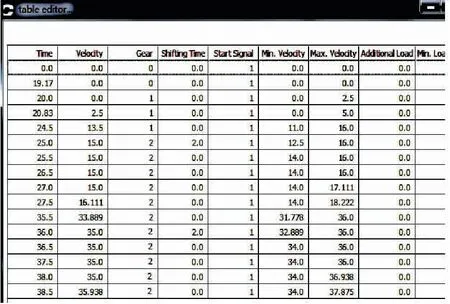
图10 循环工况导入数据
以下经济性仿真结果均在本文构建的循环工况下进行验证,匹配车辆及BYD-K9的能耗仿真结果如图11和图12所示。
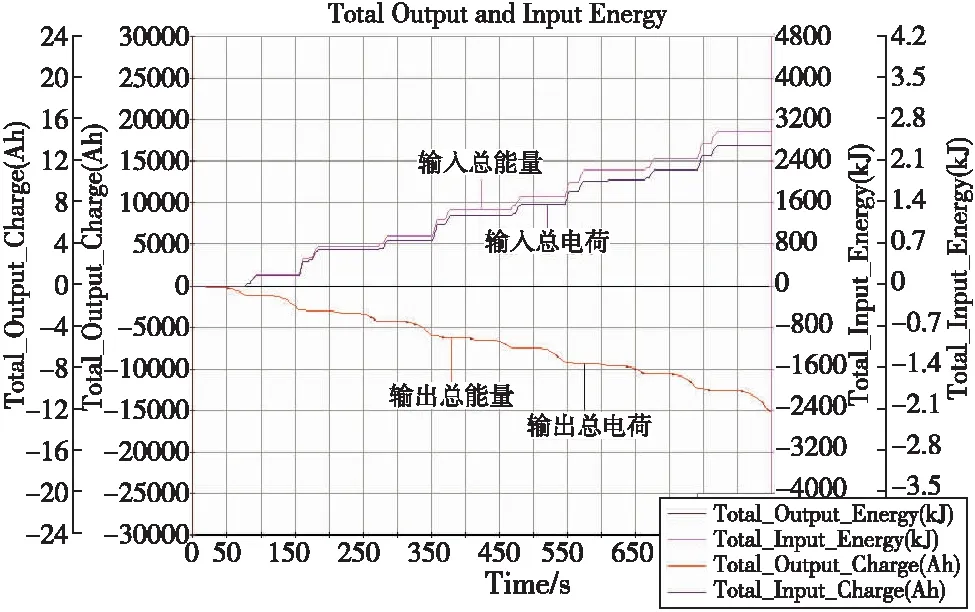
图11 匹配车辆循环工况能耗
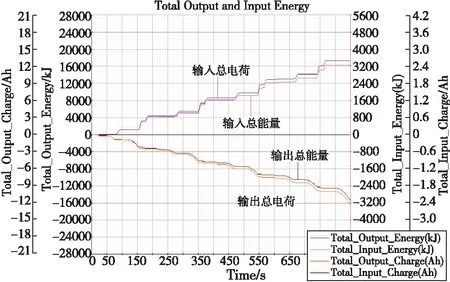
图12 BYD-K9循环工况能耗
3.4.2仿真结果对比分析
仿真结果对比分析如表5所示。
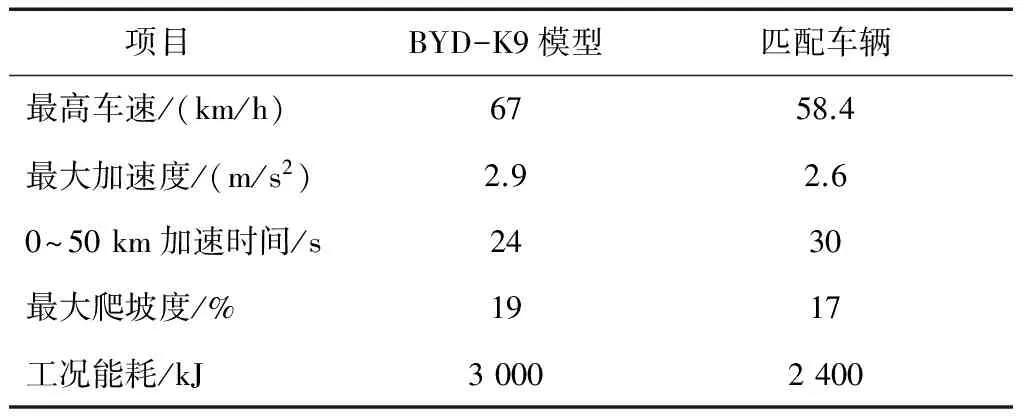
表5 仿真结果对比分析
4 结论
1)通过对西安市纯电动公交车的行驶数据采集,构建具有代表性的区域车辆循环行驶工况,并进行纯电动城市客车的驱动电机、动力电池组以及轮边减速器速比的动力系参数匹配。
2)利用AVL-CRUISE仿真软件,通过仿真结果的分析,匹配车辆的动力传动速比为定值,对于动力性有影响,但满足高新区行驶要求,电能消耗明显小于BYD-K9纯电动城市客车。
[1]吴其伟. 基于公交车循环工况的动力系统匹配研究[D]. 武汉:武汉理工大学,2007.
[2]张津涛. 电动汽车城市道路行驶工况自学习方法的研究[D].天津:天津大学,2008.
[3]杨阳. 基于西高新循环工况的纯电动城市客车动力系统匹配设计及仿真研究[D].西安:长安大学,2015.
[4]JEONG N T, YANG S M, KIM K S, et al. Urban driving cycle for performance evaluation of electric vehicles[J]. International Journal of Automotive Technology, 2016,17(1):145.
[5]锁国涛. 武汉市公交车行驶工况及发动机循环工况的研究[D].武汉:武汉理工大学,2006.
[6]孟金. 西安市典型路段城市公交循环工况的研究[D].西安:长安大学,2014.
[7]马志雄, 李孟良, 张富兴. 主成分分析法在车辆实际行驶工况开发中的应用[J]. 武汉理工大学学报(信息与管理工程版), 2004, 26(4):32.
[8]李耀华,刘鹏,杨炜,等. 西安市纯电动城市客车行驶工况研究[J]. 中国科技论文, 2016, 11( 7):754.
[9]初亮. 混合动力总成的控制算法和参数匹配研究[D].长春:吉林大学,2013.
[10]吴秋德. 电动汽车动力系统匹配设计及性能仿真研究[D].长春:吉林大学,2011.
[11]吴其伟.基于公交车循环工况的动力系统匹配研究[D].武汉:武汉理工大学,2007.
[12]张红,郑泽亮,罗成,等.基于 CRUISE 的重型车动力性经济性仿真分析与优化[J].农业装备与车辆工程,2011(12):29.
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年4期)2022-03-07
防爆电机(2021年5期)2021-11-04
上海师范大学学报·自然科学版(2018年3期)2018-05-14
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
科技创新与应用(2016年36期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20
中国塑料(2014年12期)2014-10-17