
基于图像处理的前方行驶车辆速度测量方法
2018-04-09 07:19陈荣保王乾隆
传感器与微系统 2018年4期
陈荣保, 赵 聃, 王乾隆
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
0 引 言
现有速度检测技术包括雷达、红外、超声和地感线圈等方法。微波雷达探测技术和地感线圈检测技术由于不断发展得到了广泛的应用,然而微波雷达探测设备的价格昂贵,并在使用的过程中要求高;尽管地感线圈检测可以解决这些问题,但其安装和维护非常困难,平均寿命较短[1]。近年来,由于视频处理技术的发展和成熟,视频测量方法得到了越来越多的关注,与非视频测速相比视频测速最大优点是可记录并保留车辆的图像,提供直接的证据来处理违章。然而传统的视频测速大多基于固定的摄像机进行,通过对特定的区域进行监视,获得通过该区域的车辆行驶速度,测速范围具有局限性。另外在车辆的行驶过程中,难以根据车辆的速度关系建立与前方行驶车辆的动态安全距离,为安全行驶带来隐患。
本文提出了一种车载视频的前方行驶车辆速度测量,对同一车道的前方行驶目标车辆进行检测,在此基础上,采用连续图像帧进行距离检测,通过图像帧时间间隔计算车辆的行驶速度。
1 车底阴影与路面交线提取
1.1 改进Hough变换车道线提取
在干扰车辆多、阴影多和车道线模糊等复杂的道路环境下,传统的Hough变换鲁棒性并不理想[2]。为了尽可能地减少道路两旁建筑物、护栏、树木和外车道车辆等干扰,本文采用约束极角θ的取值范围来限制检测空间的范围及确定感兴趣区域。在图像坐标系中,O0-uv坐标系是建立的以像素为单位的直接坐标系,本文建立以物理长度为单位的坐标系O1-xy,将位于图像平面的中心处的相机光轴与图像平面的交点O1定义为该坐标系的原点,且x轴与u轴平行,y轴与v轴平行。一般情况下,在一幅图像中左、右车道线应该分布在图像的左下半部分和右下半部分[3],假设测速车辆所在车道的左车道线极角为θl;右车道线的极角为θr,则Hough变换目标点的约束区域如下
(1)
Hough变换极角约束示意如图1所示。
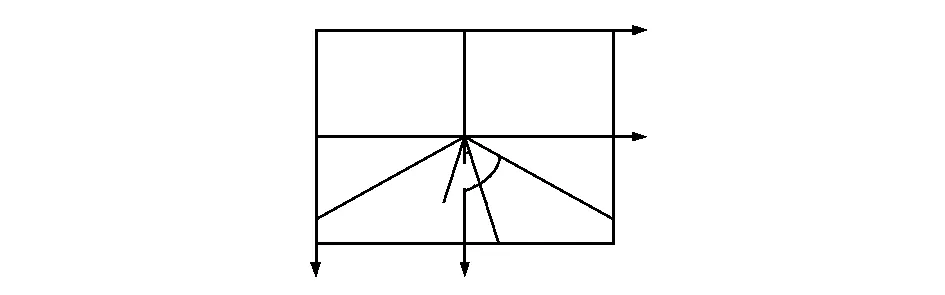
图1 Hough变换极角约束区域
通过以上约束条件,可以大量减少计算,并排除了很多干扰。车道线提取结果如图2所示,可见采用改进的Hough变换能精准提取当前所在车道的车道线,排除了其他干扰。
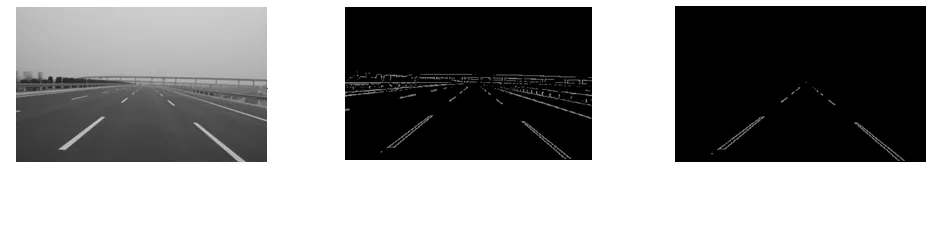
图2 车道线提取结果
1.2 阴影线检测与提取
阴影是车辆的一个显著特征,无论在何种照明条件下,车底道路区域非常黑暗且无亮度[4],文献[5]给出了这种现象的数学解释。本文利用该特性完成了车辆检测。
如图3所示。原始图像经过预处理后,将图像阈值分割可以得到车底阴影,如图3(b)所示,车辆底部阴影与路面的交线提取是车辆检测的关键步骤。在二值化图像中车辆底部阴影与路面的交线显示为一条线段,依次从上到下,从左到右遍历二值化图像的每个像素点,可知交线两侧的像素值会发生从1到0的突变。由此可根据式(2)获得该交线,检测结果如图3(c)所示

(2)
此时的图像中仍存在大量的干扰,为了去除图像中的孤立点,尽可能排除虚假线段,在图像Y轴方向上设置阈值,且每一行均有其阈值范围。若车辆阴影线长度length=xend-xstart过短,则不在该阈值范围内,该阴影线即为虚假车辆阴影线,应去除。根据小孔成像的原理,设阴影线的长度阈值为
(3)
式中W为阴影线的实际长度;H为摄像机相对于路面的高度;y为阴影线在图像中的纵坐标。
当图像中的阴影线满足式(4)时,则该阴影线为疑似阴影线,则保留;若不满足,则为虚假阴影线,将其删除
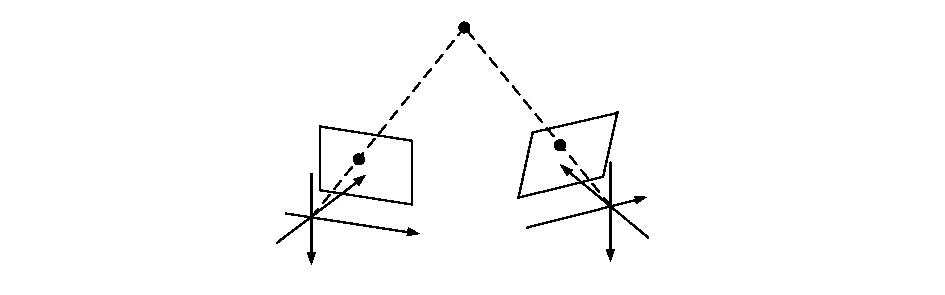
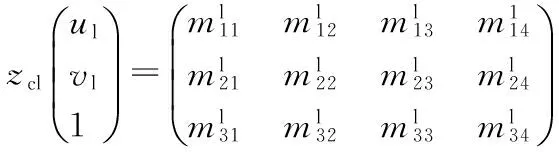
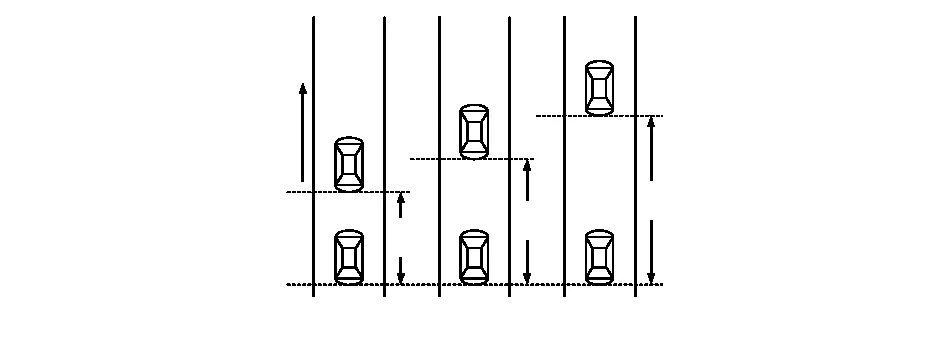
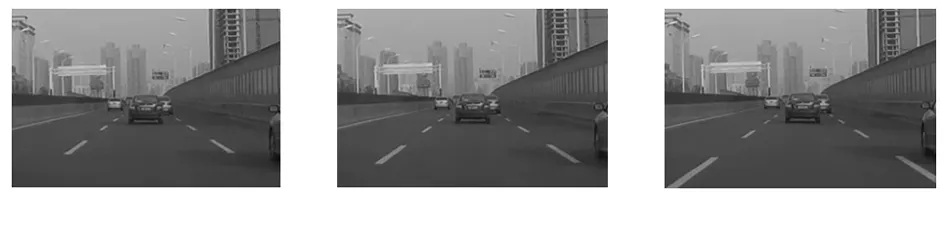
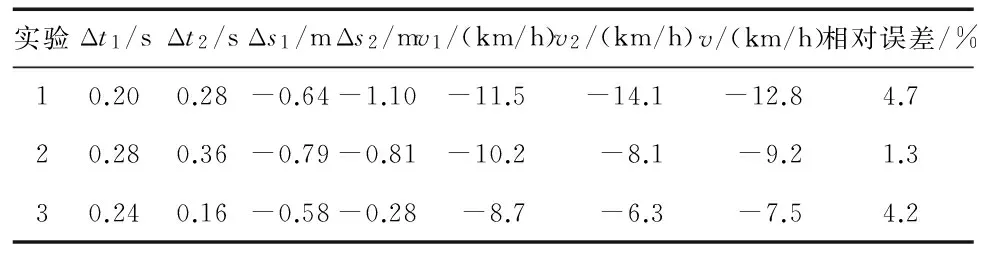
0.8wy (4) 去除图像中的孤立点干扰的车底阴影线检测结果如图3(d)所示,通过改进的Hough变换对车辆当前所在车道的车道线进行提取,可以去除相邻车道其他车辆和道路两旁建筑物等无关区域的干扰,仅保留同车道内前方车辆的车底阴影,如图3(e)所示,提取最下方一条阴影线即为最终检测到的车底阴影与路面的交线。根据先验知识(车辆的宽高比设为5∶3)生成疑似车辆位置,如图3(f)所示。 图3 车底阴影检测 生成的车辆疑似位置仍可能为图像中灰度值很低的非车辆物体干扰。因此需要验证,滤除虚假车辆,提高前方车辆检测的准确率。本文选取归一化转动惯量(normalized moment of inertia,NMI)特性来验证假设区域。 假设目标区域为图像平面中的M×N个像素点,每个像素点的灰度值为f(x,y),图像NMI公式为[6] (5) 式中 (cx,cy)为图像的质心;J(cx,cy)为图像绕质心的转动惯量;m为灰度图像的质量。对于某一帧图像,计算出疑似车辆位置即矩形框区域的NMI特征值,并与前一帧图像中相应区域的NMI特征值进行比较,如果变化率小于某一正实数ε,则可验证该区域内存在车辆,即 (6) 空间点的三维重建基本模型如图4所示。对于空间中任意一点P,如果仅用一个摄像机Cl观察,则空间点P在摄像机Cl图像平面上的投影点为Pl,由于直线OlPl上任意一点在摄像机Cl图像平面的投影点均为Pl,无法得出P点的深度信息。但在双目立体视觉系统中,使用摄像机Cl和摄像机Cr同时对空间点P进行观察,即可确定P点分别在左右2个摄像机图像平面上的投影点Pl,Pr,直线OlPl和OrPr的交点即为P点在空间中的具体位置,从而可以获得测速车辆与目标点之间的距离。 图4 空间点三维重建模型 (7) (8) 消去zcl,zcr,可得关于X,Y,Z的4个线性方程 (9) 式(9)几何意义表示过OlPl和OrPr的直线。由于空间点P为OlPl和OrPr的直线交点,则P点坐标满足式(9)。通过求解可以得到点P的世界坐标系坐标(X,Y,Z)。而对于3个变量(X,Y,Z)来说,仅需要3个独立的线性方程便能求解。对于超定方程来说,考虑到实际应用中噪声数据的存在,利用最小二乘法可以求解出P点的坐标(X,Y,Z),从而求得测速车辆与目标点P之间的距离。 本文车速检测方案仅考虑单车道,车辆行驶方向与摄像机拍摄方向相同,在行驶过程中采用2个摄像机对前方车辆进行图像采集,其采集频率为25帧/s,即每40 ms采集1帧图像。图像采集卡采集到第P帧图像所对应的时刻,记为tP,若选用第P~P+N帧图像进行速度检测,则两帧时间差为tP+N-tp。本文图像处理需要完成以下2个任务: 1)对车道线进行识别,完成当前测速车辆所在车道的车道线提取; 2)提取车底阴影与路面的交线,生成车辆疑似位置并进行NMI特征检测,确定待测车辆的参考点坐标。 本文按照车底阴影与路面交线中点位置进行速度检测,如图5所示。图中(a)~(c)分别为tP,tP+M和tP+N时刻同车道前后两车相对位置关系,利用速度检测模型可以计算出车辆在任意两帧之间的相对速度。 图5 速度检测法示意 具体步骤如下: 1)选取拍摄图像中第tP帧图像作为起始帧,tP+N帧图像作为结束帧,在两帧间选取第tP+M帧图像作为中间帧。 2)在每帧图像中,确定车辆车底阴影与路面交线的位置,并将车底阴影与路面交线中点作为车距参考点[8]。 3)采用上述三维重建测距算法分别计算tP,tP+M和tP+N时刻前后两车对应的距离sP,sP+M和sP+N,可得到tP~tP+M时刻与tP+M~tP+N时刻的速度v1,v2,将两者的平均值v作为前方车辆相对于测速车辆的速度,即 (10) 实验车辆在高速公路上进行测试,其中,后方测速车辆保持70 km/h,前方车辆保持60 km/h,不同时刻两车位置关系如图6所示。实验一截取视频第215帧图像至第227帧图像,其中第220帧图像为中间帧,可知Δt1=0.20 s,Δt2=0.28 s,分别测得相对位移Δs1=-0.64 m,Δs2=-1.10 m,相应可求出v1=-11.5 km/h,v2=-14.1 km/h,取两者的平均值v=-12.8 km/h,即测出的前方车辆行驶速度为57.2 km/h,相对误差为4.7 %。按照实验一的方法多次实验,得出的具体实验数据如表1所示,实验二、实验三中测出的前方车辆车速分别为60.8,62.5 km/h,相对误差分别为1.3 %,4.2 %。由此可知,本文方法能较为精确测得前方车辆的行驶速度,测速误差较小。 图6 不同时刻两车位置关系 表1 车辆测速实验数据 基于视频图像处理技术,在确定车辆位置后通过测量单位时间两车的距离变化获得前方车辆的相对速度。具有结构简单、速度测量结果精度较高等优点,相对误差保持在5 %以内,可以为行驶过程中动态安全距离的建立提供依据,具有广泛的应用空间。使用高分辨率、高速摄像机拍摄车辆图像有利于提高测速精度,但对系统性能有更高的要求,这将是后续工作研究的重点。 参考文献: [1] Liang W,Junfang S.The speed detection algorithm based on video sequences[C]∥International Conference on Computer Science & Service System,IEEE,2012:217-220. [2] Yim Y U,Oh S Y.Three-feature based automatic lane detection algorithm(TFALDA)for autonomous driving[J].IEEE Transactions on Intelligent Transportation Systems,1999,4(4):219-225. [3] Chen R B,Hou W,Li Y,et al.Recognition of lanes on complex roads based on video image[J].Advanced Materials Research,2014,950(2):298-305. [4] Ibarra Arenado M,PéRez Oria J M,Torre-Ferrero C,et al.Monovision-based vehicle detection,distance and relative speed mea-surement in urban traffic[J].IET Intelligent Transport Systems,2014,8(8):655-664. [5] Mori H,Charkari N M.Shadow and rhythm as sign patterns of obstacle detection[C]∥Proceedings of IEEE International Symposium on Industrial Electronics,ISIE’93,Budapest,1993:271-277. [6] 甘明刚,陈 杰,王亚楠,等.基于Mean Shift算法和NMI特征的目标跟踪算法研究[J].自动化学报,2010,36(9):1332-1336. [7] 蔡寿祥.基于双目立体视觉的车辆测速系统[D].成都:电子科技大学,2013. [8] 孙 宁,张重德.一种提高视频车速检测精度的算法分析和实现[J].合肥工业大学学报:自然科学版, 2014(12):1462-1467.
1.3 疑似车辆验证
2 前方车辆速度测定
2.1 三维重建测距

2.2 前方车辆相对速度测量算法
3 实验结果
4 结束语
猜你喜欢
河北理科教学研究(2021年4期)2021-04-19
文萃报·周五版(2020年44期)2020-11-28
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
安徽科技学院学报(2019年1期)2019-04-26
小学生作文·小学中高年级适用(2018年7期)2018-08-11
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
小学生优秀作文(高年级)(2017年4期)2017-03-22
数学大王·中高年级(2016年4期)2016-05-14
中国铁道科学(2016年5期)2016-04-10
