一种新型的桥梁主动防船撞监测预警系统
2018-04-10 05:57刘畅周曙张彩云
价值工程 2018年11期
刘畅 周曙 张彩云


摘要:本文介绍一种桥梁主动防船撞监测预警系统,包括视频监控装置、激光测高装置、报警装置以及主控机、集控中心。系统利用船舶的实时数据与软件算法相结合,预警灵敏度更高,弥补了传统的基于船舶交通管理系统和被动预防船舶撞击设施在功能及效率上的局限性,实现了全监控的自动化,减少了人的工作量并保证了事故预警的可靠性。实用性更强,探测距离更远,应急反应时间更长。
Abstract: This paper introduces a bridge active anti-ship collision monitoring and warning system, which includes video monitoring device, laser altimeter, alarm device, main control unit and centralized control center. The system combines ship real-time data with software algorithm, the warning sensitivity is higher, and it makes up for the limitation of traditional function and efficiency based on ship traffic management system and passive prevention of ship collision facilities, realizes the automatic monitoring, reduces the workload and ensures the reliability of accident warning. The utility model has the advantages of stronger practicability, longer detection distance and longer emergency response time.
关键词:预警系统;视频监控;激光测高;主控机;算法
Key words: warning system;video monitoring;laser altimeter;main control unit;algorithm
中图分类号:TN954 文献标识码:A 文章编号:1006-4311(2018)11-0187-03
0 引言
目前通航水域的桥梁主动防撞技术和方法研究仍处于空白或起步阶段[1],尚无适用的设计规范或标准。国内外现有的桥梁防船舶撞击技术主要是基于被动防船撞系统和船舶交通管理系统(VTS)进行工作的。
被动防船撞系统主要是通过提高桥梁的抗力和增加缓冲装置的方式来保证桥梁在发生船撞事件后具有足够的抗力而不发生倒塌事故[2,3]。这种方式从一定程度上降低了船撞桥事故对桥梁的损伤,但不能避免事故的发生,且导致桥梁修建费用过高,很不经济合理。船舶交通管理系统(VTS)的信息交换方法[4]主要采用高频无线电话、传真、VHF(Very High Frequency)通信等,系统信息交换流程重复繁琐,工作效率极低。同时大量船舶驾驶人员询问信息的电话咨询会影响到值班人员的正常工作,从而会造成交通安全问题。
随着计算机视觉、人工智能的发展,智能化的视频监控系统逐渐普及,广泛应用于人力监管范围外的领域。基于计算机视觉的桥梁防撞主动预警系统应运而生,采用可见光与红外光结合的复合探测、计算机视觉处理、电子信息技术等,实时获取处理现场视频数据,在复杂的内河航道背景下,监测船舶航行状况,以主动预警的方式提前提醒船员及时辅助船舶航行,保证船舶正常通航,减小船撞桥事故发生的概率,避免事故所导致的巨额财产损失甚至生命损失。
1 桥梁主动防船撞监测预警系统设计
本文介绍的桥梁主动防船撞监测预警系统框架如图1所示,系统包括视频监控装置、激光测高装置、报警装置以及主控机、集控中心,所述视频监控装置、激光测高装置、报警装置分别与主控机电连接,主控机与集控中心电连接,其中视频监控设备用于完成对通航船只的偏航监测;激光测高装置用于完成对通航船只的高度监测;主控机用于完成对通航船只运行状态的存储和处理;集控中心监测预警机制判断是否向船舶发布预警信息或其他信息,实现对船舶通航的远程监控。本文给出的桥梁主动防船撞监测预警系统,其视频监控装置包含有可见光成像系统、红外热成像系统和激光补光成像系统,以采用多光谱联合检测,根据不同可见程度及环境情况选择不同的成像模式。视频监控装置还包括安装于通航口两侧桥梁的辅助摄像机,以录制船舶通航过程。激光测高裝置包括激光光束机,其激光束中心高度与通航孔允许最高净空高度相同,以采用激光反射原理实现对通航船只的高度监测。报警装置包括LED显示屏、高音喇叭、照明灯、透雾灯及/或预警灯。通航船只的运行状态包括船舶检测、虚拟航道标定、船舶与桥梁相对位置、船舶与航道相对位置、预测船舶航线以及通航船只的偏航监测。
2 桥梁主动防船撞监测预警算法
2.1 桥梁主动防船撞监测预警算法流程
如图2所示,本文提出一种新型的桥梁主动防船撞监测预警算法,具体流程实施如下:
①安装于桥梁通航口的红外摄像仪将监控水域的视频信息传输至主控机内的监测预警软件,该软件通过船舶检测算法探测监控水域是否有船舶通行[5]。若检测到有船舶通行,则转到步骤②和步骤⑤;否则继续执行步骤①。
②当软件判断在监控水域有船舶通行,开启激光测高模块,主控机根据激光测高模块探测的高度数据判断目标船只是否超高。若检测到目标船只超高,则转到步骤③;否则转到步骤④。
③当检测到目标船只超高时,主控机启动与其连接的报警装置,LED显示屏显示“超高”,高音喇叭响,照明灯、透雾灯、预警灯亮。同时主控机记录当前时间、截取该船只现场照片、船只状态(超高)并存储至数据库。主控机发送船只超高信号至集控中心。集控中心计算机控制预警信息发布模块广播预警信息。
④当检测到目标船只未超高时,主控机控制激光测高模块进入休眠状态。同时主控机记录当前时间、截取该船只现场照片、船只状态(未超高)并存储至数据库。
⑤当监控水域检测到有船舶通行,系统软件通过虚拟航道标定算法、测定船舶与桥梁相对位置算法、测定船舶与航道相对位置算法、预测船舶航线算法,判定目标船只是否有偏航(撞击桥墩)的风险。若判定目标船只无偏航风险,则继续执行步骤⑤,同时主控机记录当前时间、截取该船只现场照片、船只状态(未偏航)并存储至数据库。待该船舶离开监测区域后,返回步骤①。否则转到步骤⑥。
⑥若判定目标船只有偏航风险,主控机启动与其连接的报警装置,LED显示屏显示“偏航”,高音喇叭响,照明灯、透雾灯、预警灯亮。同时主控机记录当前时间、截取该船只现场照片、船只状态(偏航)并存储至数据库。主控机发送船只偏航信号至集控中心。集控中心计算机控制预警信息发布模块广播预警信息。
当船只通过通航口时辅助摄像机启动并录制船只通航过程,进行存档处理,便于事故鉴定预评价。本实例中船舶运行的状态信息(超高/不超高,偏航/不偏航),LED显示屏显示信息,高音喇叭、照明灯、透雾灯、预警灯状态,均显示于桥梁主动防船撞监测预警系统软件界面。本实施例中,所述集控中心计算机可通过网络访问主控机的监测预警系统,随时对船舶通航状况进行远程监控。
2.2 基于张正友棋盘格标定法的虚拟航道绘制算法
张正友标定算法该方法介于传统标定与自标定之间,标定过程操作简便且精确度高。具体算法步骤:本地调用25幅从不同方向拍摄标定板的图像,检测标定板上各个角点,通过现实标定板角点与图像平面中角点的关系计算摄像机的内参数、畸变系数,并优化求精;本地调用与摄像机光心距离为H1的水面放置的参考板(即标定板)的图像,计算摄像机外参数。
2.3 前景检测算法
在该前景检测算法实施之前首先进行图像预处理,限定检测范围并缩短处理时间,滤除图像中由内河航道天气、光线等自然干扰产生的噪声。
基于三帧差分法与混合高斯背景差分法的前景检测综合算法[6]:三帧差分法的算法:读取三帧相邻的预处理图像,即fk-2(x,y)、fk-1(x,y)、fk(x,y),对其进行差分运算,将差分图像D1(x,y)、D2(x,y)自适应二值化OTSU、形态学处理、逻辑与运算后,得到三帧差分法的处理结果。
混合高斯背景法算法:输入预处理的图像,根据混合高斯背景模型进行背景建模,对图像中每个像素建立K个高斯模型;背景选取,把每个像素的K个高斯分布从大到小排列,若分布越靠前,则该分布描述背景的可能性越大,反之则可能性越小,按阈值H选择前面B个分布为背景像素模型(阈值H一般取经验值0.75);混合高斯模型参数的更新和前景目标的提取,获取当前帧,使各个像素值分别与所述的K个高斯分布匹配,若当前帧像素值与前B个高斯分布的任意一个匹配,则为背景像素;反之则为前景像素;对运动前景进行二值化、形态学处理即得到GMM算法检测结果[7,8]。
3 桥梁主动防船撞监测预警系统具体实施方式
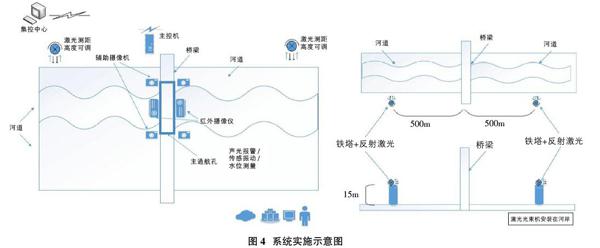
在本文所描述的桥梁主动防船撞监测预警系统的实施中,红外摄像仪安装在桥梁上,能根据不同可见程度及环境情况选择不同的成像模式;辅助摄像机安装于通航口两侧,记录船只通过通航口的过程并进行存档处理,便于事故鉴定与评价。激光测高装置安装于距通航口500m处航道两侧岸堤上,其激光束中心高度与通航孔允许最高净空高度相同;报警装置包括LED显示屏、高音喇叭、照明灯、透雾灯、预警灯,安装于桥梁上。主控机通过传输设备与视频监控设备、激光测高装置及报警装置相连。集控中心通过网络与主控机进行通讯。
4 创新性分析
本文提出的一种新型的桥梁主动防船撞监测预警系统,相较于现有的桥梁防撞技术,利用船舶的实时数据与软件算法相结合,预警灵敏度更高,弥补了传统基于船舶交通管理系统(VTS)和被动预防船舶撞击设施的在功能及效率上局限性;实现了全天24小时监控的自动化,减少了人的工作量并保证了事故预警的可靠性;防超高探测距离可随激光测距仪安装位置改变而改变,实用性更强,探测距离更远,应急反应时间更长;无需在船舶上安装任何装置,从而提高了普及性。
5 结语
本文提出新型的基于视频监控的桥梁主动防船撞监测预警系统设计及其实施方案,采用硬件测量与算法分析相结合的主动预警的方式,达到提前提醒船员及时采取措施,辅助船舶航行,从而保证船舶正常通航,减小船撞桥事故发生的概率,为我国现有的桥梁防船舶撞击技术领域提供了新思路,具有广阔的应用前景和重要的现实意义。
參考文献:
[1]李华文.关于防范船桥碰撞事故的思考[J].珠江水运,2011(24):73-74.
[2]沈自力.桥梁防船撞措施研究进展综述[J].交通科技,2015(3):73-76.
[3]夏飞.桥梁防撞系统的发展[J].中国水运:理论版,2008,6(1):70-71.
[4]戚群.成山头VTS中心雷达存在的问题和解决方案[C]//中国航海学会通信导航专业委员会2003学术年会论文集,2003.
[5]刘龙.基于海事监控平台的船舶目标检测与自主跟踪系统的研究[D].湖南师范大学,2014.
[6]徐卫星,王兰英,李秀娟.一种基于OpenCV实现的三帧差分运动目标检测算法研究[J].计算机与数字工程,2011,39(11):141-144.
[7]王丽娟.基于OpenCV与混合高斯建模的运动目标检测[J].电子测试,2009(9):86-90.
[8]张文,李榕,朱建武.基于混合高斯模型与三帧差分的目标检测算法[J].现代电子技术,2012,35(8):57-60.
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
成都信息工程大学学报(2019年4期)2019-11-04
阅读与作文(英语初中版)(2019年8期)2019-08-27
电子制作(2019年11期)2019-07-04
小学生学习指导(低年级)(2018年11期)2018-12-03
中国交通信息化(2017年12期)2017-06-06
现代防御技术(2016年1期)2016-06-01