传递函数的能控和能观测标准型实现方法
2018-04-12 03:06王春侠
电气电子教学学报 2018年1期
王春侠
(陕西理工大学 电气工程学院, 陕西 汉中 723001)
0 引言
单输入单输出线性定常连续n阶系统微分方程的一般形式为
(1)
相应的传递函数为
(2)
由式(1)或者式(2)建立如下式(3)的状态空间表达式,称为系统的实现问题。
(3)
为了分析和设计方便,通常规定状态空间表达式有能控标准型(标准Ⅰ型和标准Ⅱ型)、能观测标准型(标准Ⅰ型和标准Ⅱ型)和约当标准型这三类标准型式。
许多教科书介绍了能控标准Ⅰ型和Ⅱ型、能观测标准型Ⅰ型和Ⅱ型等四种实现,但大部分教科书对于这四种实现的状态变量如何选取未做出比较全面、简洁的解释,这给读者理解与学习这四种实现带来了一定的困难[1-5]。
本文给出由传递函数或者高阶微分方程建立能控标准型和能观测标准型的两种方法,即基于微分方程的时域法和基于梅森公式的状态结构图法。下面以三阶系统为例,详细介绍这两种方法,其结论可以推广到n阶系统。
三阶系统微分方程的一般形式为
(4)
相应的传递函数为
(5)
其中
β2=b2-a2b3
β1=b1-a1b3
β0=b0-a0b3
1 时域法
1.1 能控标准Ⅰ型实现
对式(5),引入中间变量q,令
(6)
式(5)变形为
(7)
式(6)进行拉氏反变换得
(8)
对式(8),选择状态变量
x1=q
(9)
(10)
(11)
由式(9)~(11)、式(8)和式(7),得能控标准Ⅰ型为
y=β0β1β2X+b3u
(12)
1.2 能观测标准Ⅰ型实现
对式(4),选择状态变量
x1=y-k3u
(13)
(14)
(15)
由式(13)~(15),得
(16)
(17)
并令
(18)
由式(16)~(18)和式(13),得能观测标准Ⅰ型为
y=100X+k3u
(19)
其中
k3=b3
k2=b2-a2k3
k1=b1-a1k3-a2k3
k0=b0-a0k3-a1k2-a2k1
1.3 能控标准Ⅱ型实现
对式(8),选择状态变量
x3=q
(20)
(21)
(22)
由式(20)~(22)和式(8),得
(23)
(24)
(25)
由式(23)~(25)和式(7),得能控标准Ⅱ型为
y=k2k1k0X+b3u
(26)
其中
k2=β2
k1=β1-a2k2
k0=β0-a1k2-a2k1
1.4 能观测标准Ⅱ型实现
对式(5),引入中间变量z,令
(27)
式(5)变形为
y=b3u+z
(28)
式(27)进行拉氏反变换得
(29)
对式(29),选择状态变量
x3=z
(30)
(31)
(32)
由式(30)~(32)和式(29),得
(33)
(34)
(35)
由式(33)~(35)和式(28),得能观测标准Ⅱ型为
y=001X+b3u
(36)
由式(12)、式(19)、式(26)和 式(36)可见,标准Ⅰ型的系统矩阵是底伴随矩阵,标准Ⅱ型的系统矩阵是右伴随矩阵。能控标准Ⅰ型与能观测标准Ⅱ型对偶,能观测标准Ⅰ型与能控标准Ⅱ型对偶。
2 基于梅森公式的状态结构图法
控制工程中,根据线性定常系统的信号流图,可以用梅森公式
(37)
求出传递函数。
式(37)中,P是从自变量到因变量的传递函数;Δ=1-ΣLa+ΣLbLc-ΣLdLeLf+…是特征式,其中ΣLa为所有单回路增益之和,ΣLbLc为所有两两互不接触回路的回路增益的乘积之和,ΣLdLeLf为所有三三互不接触回路的回路增益的乘积之和,以此类推;j是从自变量到因变量的前向通道的条数;pk是从自变量到因变量的第k条前向通道增益;Δk是第k条前向通道的余因子式,它等于特征式△中除去与第k条前向通道接触的回路增益项(包括回路增益的乘积项)以后的余项式。
反过来,根据梅森公式的拓扑结构,可以画出相应的信号流图来表示传递函数。状态结构图可以看成是某些节点被选作状态变量时的信号流图。
基于梅森公式列写系统的状态空间表达式的主要步骤是:①根据传递函数构造信号流图。构造原则是,首先根据传递函数的分母来构造反馈回路,再根据传递函数的分子来构造前向通道。②选择那些输入支路传输增益为s-1的节点变量作为状态变量(这时的信号流图即系统的状态结构图)。③根据得到的状态结构图,列写系统的状态空间表达式。
同一个传递函数,可以对应多个不同的状态结构图,因此,所选择的状态变量及所列写的状态空间表达式也将各不相同。
(38)
2.1 反馈回路的构造
将式(38)的分母变形,即
1+a2s-1+a1s-2+a0s-3
=1+s-1[a2+s-1(a1+a0s-1)]
分别以a2,a1,a0为反馈增益,构成三个相互接触的负反馈回路。从内至外的回路增益依次是L1=-a2s-1,L2=-a1s-2,L3=-a0s-3。
Δ=1-L1-L2-L3
(39)
2.2 △k=1(k=1、2、3)时前向通道的构造
对式(38)的分子β2s-1+β1s-2+β0s-3,令
p1=β2s-1,p2=β1s-2,p3=β0s-3
(40)
对照式(37),则
Δ1=Δ2=Δ3=1
(41)
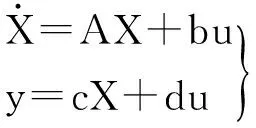
由式(39)~(41)可得式(5)的两个状态结构图,如图1和图2。按图1选择状态变量,可得能控标准Ⅰ型状态空间表达式,同式(12)。按图2选择状态变量,可得能观测标准Ⅱ型状态空间表达式,同式(36)。
2.3 △k≠1(k=1、2)时前向通道的构造
将式(38)的分子变形,即
β2s-1+β1s-2+β0s-3
=k2s-1·(1-L1-L2)+k1s-2·(1-L1)+k0s-3
其中,k2=β2,k1=β1-a2k2,k0=β0-a1k2-a2k1。令
p1=k2s-1,p2=k1s-2,p3=k0s-3
(42)
对照式(37),则

图1 能控标准Ⅰ型的状态结构图
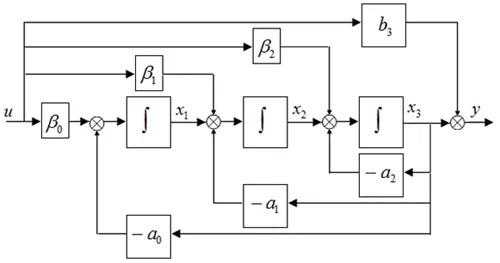
图2 能观测标准Ⅱ型的状态结构图
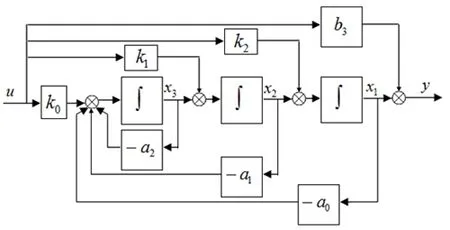
图3 能观测标准Ⅰ型的状态结构图
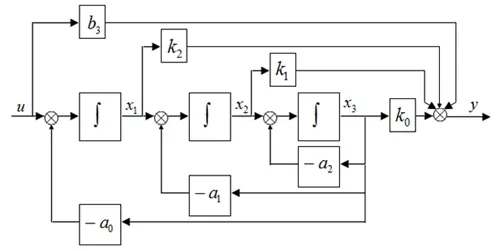
图4 能控标准Ⅱ型的状态结构图
Δ1=1-L1-L2,Δ2=1-L1,Δ3=1
(43)
由式(39)、式(42)、(43)可得式(5)的两个状态结构图,如图3和图4。按图3选择状态变量,可得能观测标准Ⅰ型状态空间表达式,同式(19)。按图4选择状态变量,可得能控标准Ⅱ型状态空间表达式,同式(26)。
由图1~4可看出,能控标准型和能观测标准型的状态结构图有以下特点:
(1)能控标准型的各状态变量同输入变量一起线性叠加构成输出变量,如图1和图4。能观测标准型的输入变量叠加到各状态变量的微分端和系统的输出端,如图2和图3。
(2)标准Ⅰ型的各状态变量均反馈到最左边状态变量的微分端,且最内环L1在最左边,如图1和图3。标准Ⅱ型的最右边的状态变量分别反馈到各状态变量的微分端,且最内环L1在最右边,如图2和图4。
可见,使用状态结构图法,状态变量的选择及状态空间表达式的列写会方便和直观得多,无需死记某些组合的关系式。
3 结语
时域法与状态结构图法的本质是相同的,但后者巧妙地利用传递函数的状态结构图不唯一这一性质,把四种实现型式统一成两种前向通道的选择,化繁为简,更易于掌握。
参考文献:
[1]周凤岐,周军,郭建国.现代控制理论基础[M].西安:西北工业大学出版社,2011年.
[2]贺良华.现代控制理论及应用[M].武汉:中国地质大学出版社,2013年.
[3]王子平.自动控制系统的状态空间方法[M].北京:国防工业出版社,1980年.
[4]王划一.现代控制理论基础[M].北京:国防工业出版社,2004年.
[5]曲延滨,王新生.现代控制理论基础[M].哈尔滨:哈尔滨工业大学出版社,2005年.
猜你喜欢
贵州大学学报(自然科学版)(2022年6期)2022-12-26
南宁师范大学学报(自然科学版)(2022年1期)2022-05-10
数字技术与应用(2021年2期)2021-04-22
电子世界(2021年22期)2021-02-28
湖南大学学报·自然科学版(2021年1期)2021-02-21
——如何培养学生的创新思维
数理化解题研究(2020年6期)2020-03-07
信阳师范学院学报(自然科学版)(2018年1期)2018-08-09
青年文学家(2017年35期)2017-12-26
课程教育研究·新教师教学(2015年9期)2017-09-26
中国校外教育(中旬)(2017年2期)2017-04-10