
全垫升气垫船登滩运动特性分析
2018-05-03 09:01沈剑毅汤宇嘉
船舶 2018年1期
沈剑毅 高 嵩 汤宇嘉
(1. 中国船舶及海洋工程设计研究院 上海200011;2.上海海迅机电工程有限公司 上海200011)
引 言
全垫升气垫船是一种贴近水面滑行的水上高速运载工具,具有许多优良特性,如:航速快、水下物理场小、两栖性好、适应性强等,在军事、救援、破冰、扫雷等领域具有明显优势,尤其适于用于两栖输送工具使用[1-2],因而得到世界各国的高度重视。全垫升气垫船的工作原理是利用大功率风扇向船体底部快速压入大量空气,使船体底部与水面之间形成动力气垫,使船体全部脱离水面,同时使用柔性围裙围在船底封闭气垫以增加船体飞高、冲滩和越障的能力。
气垫船在冲滩过程中先后经历近岸航行阶段、登滩阶段以及岸滩航行阶段,在不同阶段其运动特性存在较大差别,尤其在登滩过程中,气垫船部分位于水介质上,部分位于陆地介质之上,船的运动状态复杂且变化剧烈,虽然时间较短,但对气垫船登滩运动特性有很大影响。
本文以某型全垫升气垫船登滩实测数据为研究对象,对该型船登滩过程中的运动航速、姿态、加速度和压力等运动参数的变化特性进行深入分析,获得全垫升气垫船登滩过程的运动特性,不仅可用来指导气垫船驾驶员的登滩操作,而且对于完善气垫船的理论体系和改进气垫船的性能具有一定的指导意义。
1 登滩运动测试参数及测试方法
气垫船的运动特性不仅与气动力、水动力和导管桨推力直接相关,还与风机-气道-围裙构成的垫升系统密切相关[3],目前国内对气垫船运动特性,尤其针对登滩这种跨越水陆界面的复杂运动,缺乏准确的理论预报手段,因而有必要通过实船运动参数测试,积累重要的实船运动原始数据,从而分析气垫船在登滩时运动参数的变化规律与内在联系,以便掌握其运动规律和操纵特性。
全垫升气垫船登滩运动测试的主要参数包括航迹、航速、航向角、纵摇、横摇、加速度等运动参数,侧风门状态、桨距角、舵角等操纵面参数,以及风向、风速、浪高、气温和气压等环境参数。此外,考虑气垫压力和气囊压力对气垫船运动特性具有的重要影响,还对气囊和气垫内的压力进行测试。上述各参数的测试和采集主要通过多种传感器来实现,并已考虑被测参数的特性及精度要求。
1.1 数据测量设备选型
在本次运动测试中,气垫船的位置、速度、航向等信息由GPS获取。由于测试在海上进行,距离陆地基站距离较远,因而GPS需要本地基站才能输出航向角, 故采用双天线阵列。测试装置选择麦哲伦802高精度GPS,它是一种新型的集高精度定位、定向为一体的双频GPS设备,能够满足现代导航系统需要,在高磁性的环境下也能提供快速和准确的测量数据,是理想的航迹测量设备。GPS通过RS232接入中心控制网关BS909N,采集分析软件依据坐标和航向角,实时计算航行轨迹。
纵横摇测试通过机械式垂直陀螺实现,与电子陀螺相比,其角度更趋于稳定,抗干扰性能强,而且具有频响高等优点,垂直陀螺经过解调后的电压信号接到无线电压节点,通过中心网关联接入测试系统。加速度测量采用无线加速度计实现,由无线加速度传感器节点完成数据传输。
无线加速度传感器节点内置MEMS电容三轴或单轴加速度传感器芯片,能够响应缓变的低频加速度。共选取4个三轴加速度传感器和1只单轴加速度传感器,安放在气垫船不同位置,分别测量首部、尾部及重心处加速度。
气垫船的操纵面参数包括桨距角、舵角和侧风门,均需通过传动机构来实施操纵[4],需专门研发相应的测量方法,选择合适的传感器进行采集,并设计专门的安装结构。选用拉绳传感器对操纵面参数进行测量,通过拉绳传感器的位移变化换算操纵面所对应的角度变化。
环境参数包括风速、风向、浪高、浪向、气温以及气压等。风速与风向通过无线风速、风向传感器节点实现,浪高测量使用浪高仪。环境气压由高精度手持气压温度表测得并记录。
各参数测量所用传感器及接入方式见下页表1。
围裙囊压和气垫内压力的测量选用两种类型的压力传感器:薄片压力传感器和微型压力传感器,根据测量位置的特点分别布置。薄片传感器厚度<5 mm,可以直接粘贴在测试表面进行检测,对流场影响较小,同时具有高频动态响应,抗振能力强,可用于气垫内压力测试。微型压力传感器安装方便,可靠性强,可用于测量大囊内压力。围裙囊压和垫压的测量共使用34个压力传感器,分别布置于围裙大囊和船底气垫内。船底气垫内共布置16个,全部为耐腐蚀的膜片压力传感器。考虑到不破坏气垫船底板,安装采取胶粘方式,且未进行任何打磨。围裙大囊内分别布置18个螺纹压力传感器,固定方式主要采取螺栓连接。数据采集系统的采样频率范围为20 Hz。输出数据中包括时间序列,用以保证采集数据的同步性。

表1 测试设备及接入方式
1.2 时间同步测试方法研究
数据的时间同步性对气垫船运动数据采集具有重大意义,运动参数只有满足同步性要求,才能体现气垫船的运动响应特性及航行特性,因而需进行时间同步设计。传感器节点信号传输时间不同步的主要原因有:
(1)节点内部定时晶振固有的频率偏差和时间累计误差;
(2)节点接受时间时产生的时延误差。
通过开发不使用浮点运算、占用内存小的时间同步技术,解决了上述2项时间不同步问题。
对于授时产生的时延误差,其消除方法为:在主节点同步之前,先发送前导码和同步字符,给同步信号命令包打上时间标志t0,接收节点收到前导码和同步字符时,记下本地时间t1,在开始处理接收到的数据包时,记下时间t2,根据发送位数n和发送每比特需要的时间t,可以估算出前导码和同步字符的发送时间为nt,接收节点的时钟调整为t0+nt+(t2-t1),从而消除授时的时延误差。
对于晶振的固有偏差和时间累计产生的误差,在计算时间同步时,直接采用具有较高时间分辨率的计时器所测数值。在测试过程中,每60 s同步授时一次,硬件计时器的差值刚好等于软件修正晶振的值,此时的晶振修正后偏差可达2.5×10-7MHz。随后,每隔60 s同步校正一次,可达到时钟同步精度0.1 ms。该算法巧妙利用硬件电路特性,对晶振的偏差估计不使用复杂的浮点运算,减小了同步的开销。
2 气垫船登滩过程描述
气垫船登滩测试在南海某海域进行。测试当天天气晴朗,海况等级为1~2级,未见明显浪高。登滩位置为沙地,气垫船登滩时状态为满载排水量。
气垫船的登滩运动具体可划分为三个阶段:近岸航行阶段、登滩阶段和陆上运动阶段。在近岸航行阶段,气垫船首先从海里穿过进入近岸区,该区域内水深小于气垫船的长度,浅水兴波阻力较大,傅汝德数为0.35时,可达水深的3倍,因而该阶段航行时阻力会增加,操作不当会引起航速迅速下降。当气垫船首部抵达岸滩瞬间开始进入登滩阶段,具体的登滩过程如图1所示。

图1 气垫船登滩过程
图1(a)为气垫船首部抵达岸滩瞬间,也为登滩的初始时刻。由于本次测试的登滩点处岸滩为倾斜角约5°、长度约为船长1/5的斜坡,因而登滩阶段又可划分为三个过程:首部爬坡过程、中间爬坡过程和尾部爬坡过程。首部爬坡过程是指气垫船首部开始离开水面进入岸滩,但尚未到达坡顶这一运动阶段,如图1(b)所示;中间爬坡过程是指气垫船首部已经达到坡顶进入岸滩航行,但其尾部尚未离开水面的过程,如图1(c)所示;尾部爬坡过程是指气垫船尾部脱离水面,但尚未至坡顶的一段过程,如图1(d)所示。当气垫船尾部离开坡顶后,进入陆上运动阶段。在此次测试过程中气垫船在岸滩航行一段时间后掉头重新返回海中。
3 气垫船登滩运动测试结果及分析
选取登滩点处为坐标原点,选取气垫船首部抵滩时间,即气垫船处于图1(a)的位置时为初始时刻,测试结果如图2 -图5所示。
图2为气垫船在测试过程中的航行轨迹,横坐标为气垫船在东西方向上的无因次移动距离,纵坐标为气垫船在南北方向上的无因次距离,无因次距离指气垫船移动的距离与其艇纵向长度的比值。
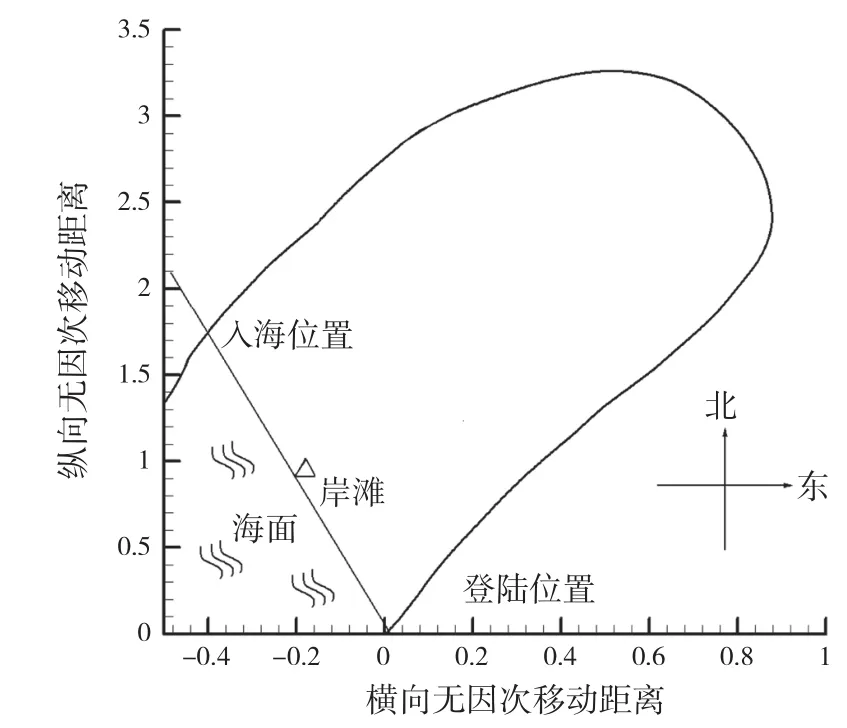
图2 气垫船登滩运动轨迹
由图2可见,气垫船在与岸滩近似垂直的角度登滩后,向陆地深处航行约4倍艇长距离后,掉头重新返回海中。
图3为气垫船登滩过程中螺距角的平均值及其对应的傅汝德数的变化过程,其中实线为气垫船登滩过程中平均螺距角随时间的变化,虚线为登滩过程中航行傅汝德数随时间的变化,图中横坐标为测试时间,初始时刻为登滩的瞬间,左边纵坐标为航行的傅汝德数,右边的纵坐标为气垫船的平均螺距角。

图3 气垫船登滩运动航速和平均螺距角
由图3可见,气垫船在近岸航行过程中通过变化螺距角调整登滩航速,航速随着螺距角减小不断下降。在登滩瞬间,傅汝德数约为0.2,并且螺距角基本不再变化。由于惯性及岸滩坡度的影响,航速继续下降。为确保登滩成功,在气垫船首部登上岸滩后开始增加螺距,最终航速稳定在傅汝德数0.18左右。登滩过程从首部抵达岸滩开始至尾部离开斜坡结束,持续15 s之后进入陆地运动过程。
图4为气垫船登滩过程纵横倾角的变化曲线。图中横坐标为航行时间,纵坐标为倾角,实线代表纵倾角的变化特性,虚线代表横倾角的变化特性。

图4 气垫船登滩运动倾角变化
由图4可见,在近岸航行阶段,气垫船的纵、横倾角并非稳定不变,而是呈现一定的波动,波动幅值约为0.5°,这是航速变化、浅水效应及近岸浪共同影响的结果。在登滩阶段,当气垫船处于首部爬坡过程中时,受到坡度和气垫船爬升高度的影响,纵倾角开始持续增加,并在首部抵达坡顶时达到约2.2°的最大值。当气垫船的首部离开斜坡进入平地的瞬间,首部泄流区增加,受此影响纵倾角会有所下降。测试显示本次登滩纵倾角下降约0.6°,之后稳定在1.7°左右,呈小幅波动状态,并持续整个中间爬坡过程。进入尾部爬坡过程后,随着气垫船尾部不断爬升,纵倾角开始迅速下降,并在尾部到达坡顶后稳定在0.4°左右。在气垫船登滩过程中,横倾角也小幅增加,最高时左倾达0.5°。这是由于气垫船登滩过程中并非完全垂向登滩,而是与斜坡有10°左右的角度差,导致重心位置偏左。
图5为气垫船登滩过程气垫压心和重心纵向相对位置的变化曲线。图中横坐标为时间,纵坐标为压心位置与重心位置之间的纵向相对距离。

图5 气垫船登滩运动气垫压心变化
由图5可见,在登滩阶段,当气垫船首部开始爬坡时,压心与重心间距离开始增加,即压心开始向前移动。这主要由于气垫船首部爬坡过程中,斜坡封闭了首部围裙泄流区,导致前气室压力增加,压心位置前移并在首部抵达坡顶时,与重心距离达到最大值约0.055倍艇长。当气垫船的首部离开斜坡进入平地的瞬间,首部泄流区增加,受此影响,压心位置向后移动约0.005倍艇长。进入尾部爬坡过程后,尾部泄流区面积减小,尾部气室压力开始增加,压心位置因而进一步后移。
比较图4和图5可见,压心位置变化趋势与纵倾角变化趋势基本一致,这说明纵倾角的变化主要是由压心位置移动造成。本次测试参数变化趋势与相关气垫船仿真和测试结果基本吻合[5-7],说明测试结果真实可信。
4 结 论
本文选取某型气垫船登滩过程为研究对象,通过自主研制的测试系统对气垫船登滩爬坡过程的运动特性进行测试,获得气垫船登滩过程中的位置、航速、螺距角、纵倾角、横倾角以及压心位置等特性参数的同步结果。结果表明,气垫船在登滩爬坡过程中,纵倾角和压心位置会产生较大波动,且两者变化趋势基本一致。通过本文的测试与分析,不仅积累了重要的实艇登滩过程运动数据,掌握实艇登滩过程的运动规律,也提高了该项气垫船使用的技术保障能力。
[参考文献]
[1]恽良. 气垫船原理与设计[M]. 北京:国防工业出版社,1990.
[2]王洪修. 适应新时期军事斗争需要加速军用气垫船发展[C]. 航海技术现状与发展趋势论文集(2001),广州,2001:117-119.
[3]马涛,邬成杰. 气垫船总体性能与围裙气垫系统流体动力设计[M]. 北京:国防工业出版社,2012.
[4]张根泉. 浅谈高密度气垫船的空气舵设计及其气动力性能[J]. 船舶,2003(6):37-38.
[5]卢军,黄国梁. 全垫升气垫船4自由度操纵性[J]. 上海交通大学学报,2007(2):216-220.
[6]冀楠. 全垫升气垫船运动特性研究[D]. 哈尔滨:哈尔滨工程大学博士学位论文,2014.
[7]付明玉,张洪雨,施小成,等. 气垫船操纵性能理论分析[J]. 中国造船,2006(3):14-20.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
当代陕西(2021年13期)2021-08-06
北京汽车(2021年3期)2021-07-17
汽车维修与保养(2021年8期)2021-02-16
科学大众·小诺贝尔(2021年10期)2021-01-22
当代工人(2020年1期)2020-05-11
电子制作(2019年22期)2020-01-14
电子制作(2019年9期)2019-05-30
时代英语·高一(2019年1期)2019-03-13
速读·中旬(2015年10期)2015-10-21
