
一种MBR约束下的高分光学影像直角建筑物提取与标绘方法
2018-05-04 07:01李百寿李灵芝
测绘通报 2018年4期
李百寿,李灵芝,张 强
(1. 桂林理工大学测绘地理信息学院,广西 桂林 541004; 2. 广西空间信息与测绘重点实验室,广西 桂林 541004)
随着遥感技术的快速发展,光学遥感影像的分辨率不断提高,采用多层次目标识别[1],栅格与矢量处理结合[2],利用影像颜色、形状、纹理、空间关系等图像特征,进行建筑物的自动识别和标绘一直是国内外研究的热点问题[3]。其中如何充分利用建筑物的几何特征[4]进行建筑物角点检测[5-6]、边缘线检测[7-8]、建筑物轮廓构建[9-10]及主方向求取[11],成为了研究中的重点。
张正通过分层次目标过程模型描述建筑物轮廓,并通过角点检测方法自动标绘出目标矢量形状,建筑物标绘精度达到91.2%[1],可用于多类城区建筑物的自动标绘。还可以通过机器学习,建筑物轮廓构建采用两个反向神经网络分别用来生成初始化建筑物轮廓和删除无用轮廓信息,根据感知器内栅格排列的情况训练神经网络,确定出建筑物轮廓描述的规则,实现建筑物聚集区域的标绘[9]。
利用图像边缘检测技术获取建筑物的边缘轮廓信息,然后通过对边缘轮廓进行筛选、优化及填充等操作提取出了完整的建筑物边界[2]。孙金彦结合SVM多类分割算法和数学形态学方法粗略得到建筑物的候选斑块,通过高斯边缘模板匹配的矢量化方法细化建筑物轮廓信息。矢量化结果平均准确度为89%、完整度为98%、几何形状相似性为87%、整体质量为85%[2]。吕凤华基于模式识别和场景分析思想,通过HOG识别建筑物中心部分,再由纹理光谱融合特征剔除干扰地物,这种多层次特征结合的方法可细化建筑物的边缘信息,其中建筑物正确检出率96%以上,错检率为12%[12]。
基于细化的建筑物标绘方法精度较高,但较费时,需要利用种子区域生长、hough直线检测技术,不能直接提取图形的线宽等信息[13-14]。例如QI Min等提出了一种从单一的遥感影像中自动提取建筑物的直线轮廓信息。首先提出一种获取初始种子点区域生长的方法,随后以Canny边缘图辅助区域生长策略选择分离阈值去除非建筑物部分,最后屋顶被细化后并配用直线拟合的算法来获得直线边界,将直线轮廓通过边界跟踪提取[15]。程效军提出一种综合多种数据提取建筑物轮廓,通过建筑物同名角点将机载雷达点云与航空影像进行配准,根据融合影像对建筑物轮廓进行精确提取[16]。多源遥感数据的综合运用虽然可以进行精细化提取,但是需同时获取高分影像数据和机载雷达点云数据,不仅增加了数据获取难度且花费成本较高。
本文基于分层次目标提取的基本方法,提出一种最小外包矩形(MBR)约束下的高分光学影像直角建筑物标绘方法。先通过CART分类树结合面向对象的方法粗提取建筑物的轮廓信息,再通过构建角点方向决策器确定建筑物的角点及其顺序,最后连接各个角点自动标绘出光学影像中的建筑物。
1 MBR约束下的建筑物提取与标绘
1.1 建筑物提取与标绘方法流程
MBR约束下的建筑物提取和标绘技术流程如图1所示,详细步骤如下:
(1) 将高分辨率遥感影像通过面向对象的方法进行多尺度影像分割,根据影像特征将同质区域分割成多个子区域。
(2) 从分割后影像选取一定量有代表性的数据作为样本对象特征数据,导出其属性信息,通过SPSS分类模块中的CART分类方法,确定各属性的重要性。
(3) 选取重要性前三的属性进行训练,获取CART分类树分裂节点阈值,建立规则信息。
(4) 根据在SPSS中建立起的CART规则信息,在eCognition中重新建立软件能够读取的分类规则,提取出建筑物所在区域。
(5) 通过形态学变换修复提取的建筑物区域,首先利用数学形态学处理步骤(4)提取的建筑物区域,去除提取的建筑物的“毛刺”“空洞”等问题区域。并通过Candy算子进行建筑物轮廓粗提取。
(6) 根据步骤(5)提取的建筑物轮廓,计算最小面积的MBR,并确定建筑物的主导方向。
(7) 计算建筑物各边到MBR的一对直角边的距离,利用聚类的方法把所得到的距离值分成N类,每一类用其平均值D表示距离直线的距离,N表示建筑物的边数。
(8) 将N个距离值对应的MBR边平移D个单位以此来拟合建筑物边缘线;计算各个直线的交点,以此来表示建筑物的角点或者位于边界线上的点。
(9) 确定角点的行走方向,然后根据行走方向将各点按指定的顺序连接起来形成的直角多边形就是标绘的最终结果。
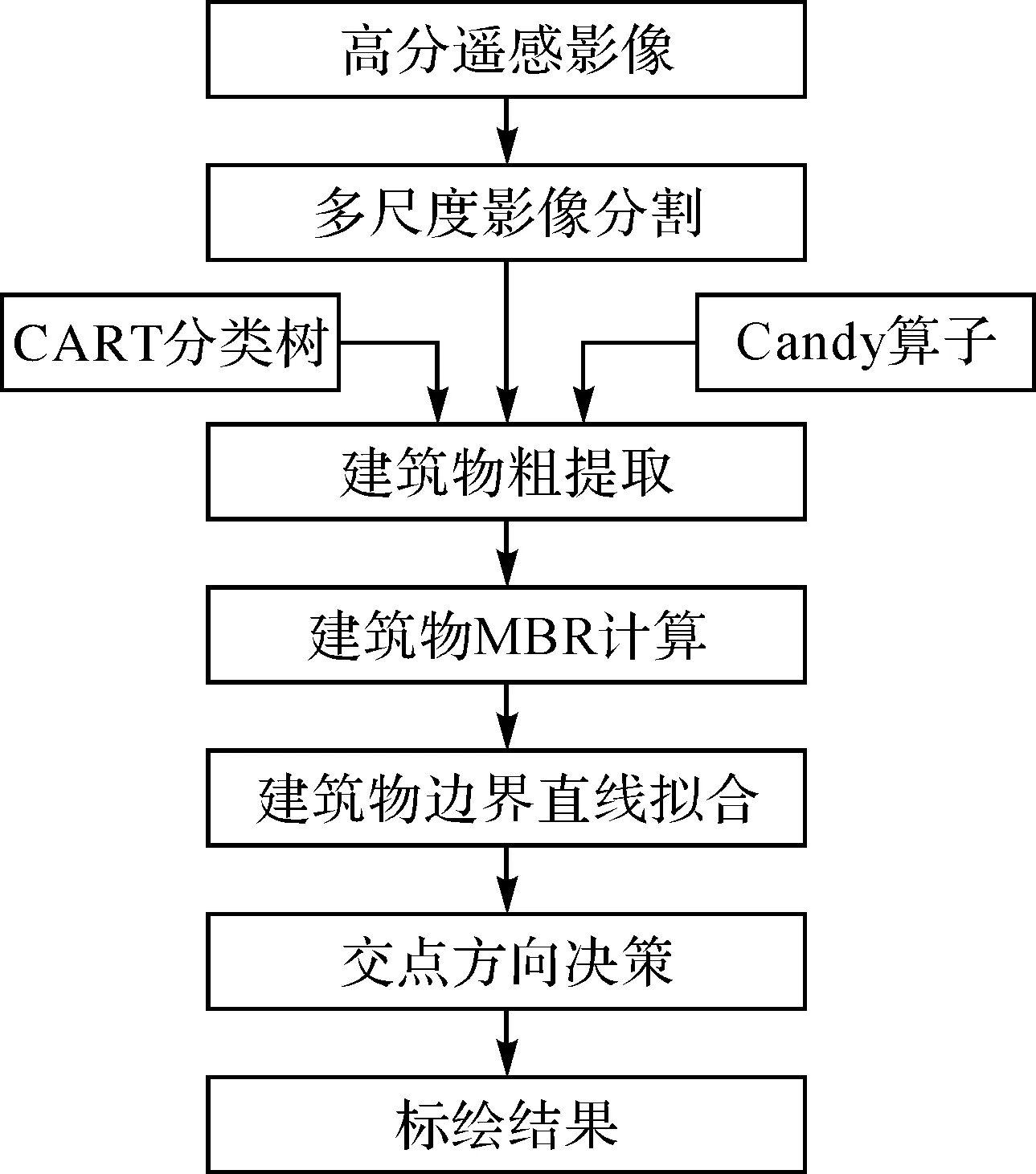
图1 建筑物提取与标绘技术流程
1.2 CART决策树结合多尺度分割提取建筑物区
1.2.1 CART决策树
CART决策树在遥感影像分类中得以有效地应用。其基本思想是根据一定的分类规则,把遥感影像数据一分为二的向下划分,最终得到属性不同的子类。
决策树中每一个子节点表示一个决策,不同的决策选择影响着叶节点表示的决策结果。CART算法采用的是二元递归分割的方法将样本集逐级划分形成二叉树。分割的评价策略为
(1)
式中,T为决策树的某个节点;m为类别集因变量数目;Ci为类别;pi为类i在T中的相对概率。当i在T中为倾斜时,gini(T)最小。当gini(T)=0时,所有样本属于同一类,当所有类在节点中表现为相同的概率时,gini(T)最大化。衡量出某个属性的GINI指数后,可以得到ginisplit(T)数据
(2)
式(2)被称为GINI信息增益,在CART中,选择其中最小的信息增益作为结点划分决策树。训练数据集T中的属性F将T分成T1和T2,给定划分的GINI指标
(3)
对于离散值属性,在算法中递归的选择该属性产生最小GINI指标的子集作为它的分裂子集。
1.2.2 融合CART决策树和多尺度分割方法提取建筑物区
根据影像的特征,对影像进行多尺度分割将不同质区域分割成多个子区。从分割后的遥感影像子区选择一定量的、有代表性的数据作为样本。从eCognition中导出样本数据属性信息。利用SPSS分类模块中的CART分类方法检测各个属性的重要性。根据选取重要性排在前三的属性,获取CART分类树分裂节点的阈值。利用SPSS中CART功能,选择相应的属性进行训练,就可以直接获取阈值。根据阈值做出CART分类树的示意图如图2所示。

图2 CART规则树建立
根据在SPSS中建立起的CART规则信息,在eCognition中重新建立软件能够读取的分类规则,进行建筑物区域的粗提取。
1.3 建筑物的自动化提取与形状标绘
1.3.1 建筑物MBR计算
在Matlab平台,首先使用Candy算子对粗提取建筑物区域进行轮廓提取。然后将建筑物轮廓信息转化成轮廓点集,通过轮廓点集运算,计算建筑物的MBR,详细的计算步骤如下:
(1) 输入轮廓点集Ei(xi,yi),并计算轮廓的形心Center(p,q),形心的x坐标为
形心的y坐标为
Center(p,q)、Ei(xi,yi)连线与x轴的夹角为a1。
(2) 找出Ei(xi,yi)中xi和yi的最小和最大值minx,miny,maxx,maxy,以(minx,miny),(maxx,maxy),(minx,maxy),(maxx,miny)作为外接矩形的4个顶点确定一个矩形。计算矩形面积A1,将A1赋给min(Area),顶点坐标赋给
Rect=(minx,miny,maxx,maxy)

(4)
(4) 调用步骤(2),计算旋转β后的外接矩形的面积Ai,判断(Ai)≤min(Area)是否成立;若成立,则min(Area)=Ai,同时将获得的矩形4个顶点坐标顺时针旋转β,更新
Rect=(minx′,miny′,maxx′,maxy′)
(5) 重复步骤(4),直至程序结束,最后的矩形顶点坐标集即构成最小外包矩形。
1.3.2 轮廓分段拟合与优化
提取建筑物的粗轮廓往往呈不规则的波浪形边界,然而实际中建筑物边界为规则直线。将不规则的轮廓转成规则直线最基本常用的方法为直线拟合。设一组坐标点Ni(xi,yi)∈E(i=1,2,…,M)之间的线性关系为:y=ax+b,通过最小二乘估计参数
(5)
建筑物边界线由多个直线段组成,因此需要对建筑物粗轮廓进行分段。分段的方法为将轮廓坐标投影到该轮廓的主方向或副主方向上。
传统直线拟合结果在确定建筑物角点时会出现很大偏差,拟合出的直线破坏了边界线之间的正交关系和平行关系。为了解决此偏差,需要对最小二乘拟合的结果进行优化。本文在MBR约束条件下调整拟合直线斜率,使直线与主方向平行或正交,然后根据最小二乘法求得直线方程截距。设优化后的直线方程为
y=a′x+b′
(6)
式中,α′=tanθ;b′=(∑yi-α′∑xi)/M。
1.3.3 交点方向决策器
拟合直线的交点并非全部位于建筑轮廓上,故先要设定一个半径为R的圆,判断圆域内是否有轮廓片段数据。如果没有,则不做决策,进入下一个交点;如果有轮廓片段,则根据圆形区域内轮廓片段的特征给该点的方向做出决策。最后将这些点按照顺序连接,即可成功标绘出建筑物。为此,本文设计了交点方向决策器。
交点方向决策器是一个以交点为圆心,半径为R的圆形区域,具有决策该点方向的功能。为了让决策器做出准确判断,首先定义出交点的方向关系。以建筑物主方向和副主方向为坐标轴,交点坐标Pt为坐标原点,建立局部坐标系如图3所示,新建立的坐标系把平面分成了4个区域,位于局部坐标原点上方的区域定义为第一区,位于局部坐标原点左边的区域为第二区,位于局部坐标原点下方的为第三区,位于局部坐标原点右方的区域为第四区。
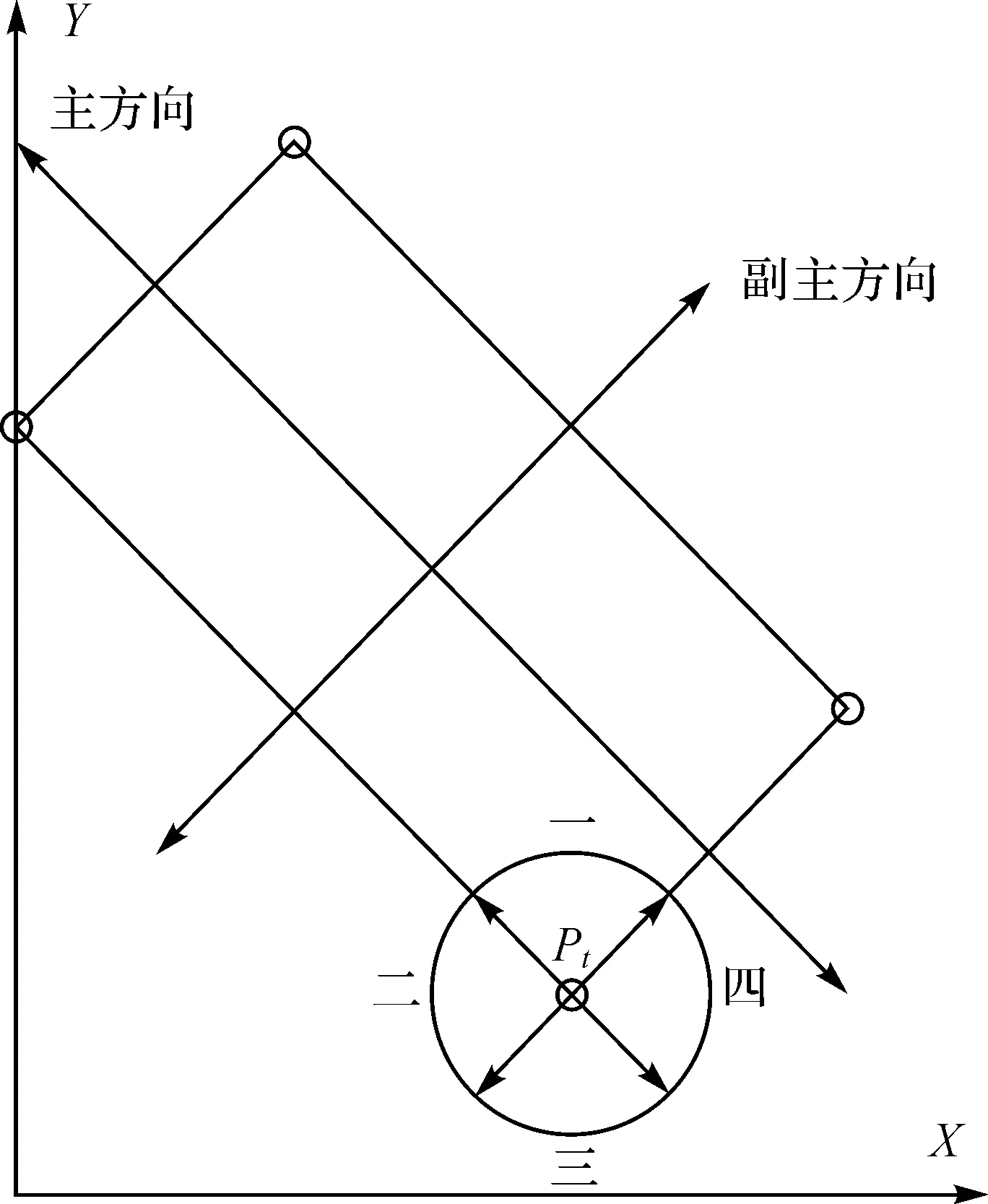
图3 局部坐标系
根据交点处轮廓的特征可以得出6种方向关系,如图4所示,因此一个决策器可以根据轮廓片段特征做出6种方向关系的决策。图4(a)表示第一区走向,(b)表示第四区走向,(c)表示第三区走向,(d)表示第二区走向,(e)表示主方向走向,(f)表示副主方向走向。
2 试验与结果分析
为了验证提出的基于MBR约束的光学影像直角建筑物标绘方法的有效性,本文进行了相关试验。试验1为从影像中截取了单一建筑物进行提取和标绘;试验2为对某一区域所有建筑物进行标绘;最后计算标绘后得到的建筑物的周长和面积,进行精度评价。
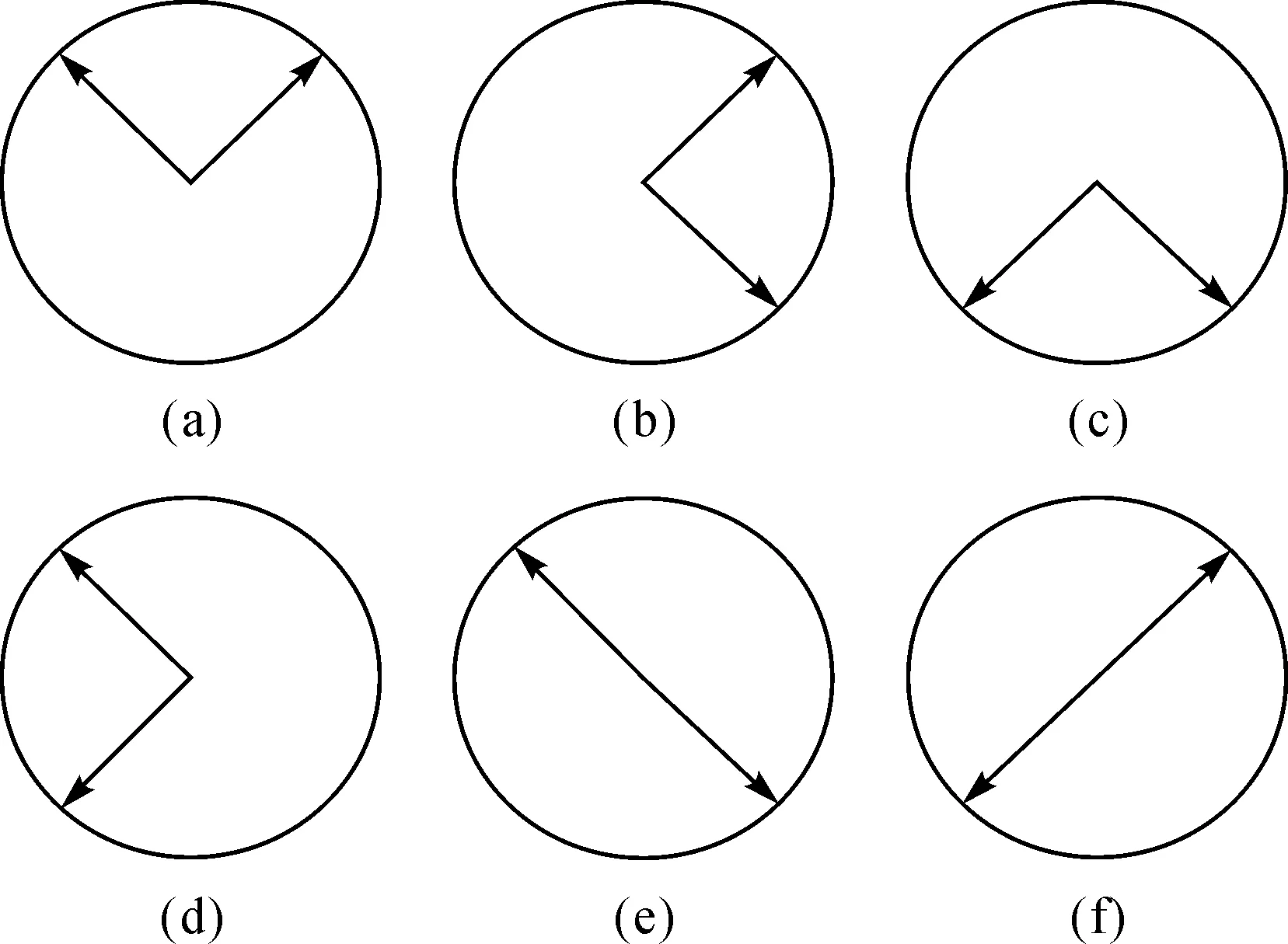
图4 决策器方向模式
2.1 试验1
本文所用研究数据为广西某地高分遥感影像截取的单一建筑物,影像大小为219×219像素,试验环境为Matlab2013a 语言编程环境,使用计算机处理器为Intel(R) Xeon(R)CPU E5645,处理速度为2.40 GHz,内存为4 GB。利用Matlab2013a编程平台计算该建筑物的MBR,如图5所示。
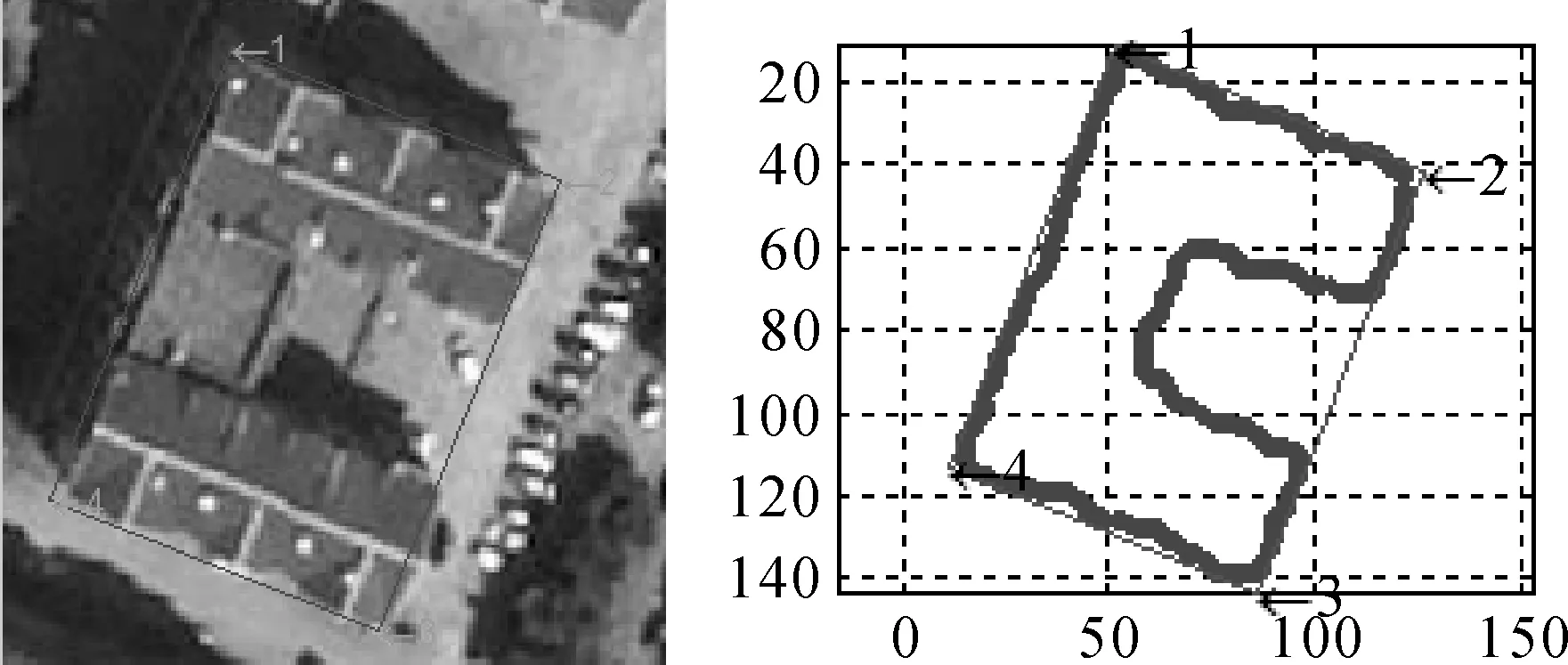
图5 原始影像及其最小MBR计算
该MBR由直线L12、L23、L34、L41组成,根据点到直线的距离公式,计算轮廓上的坐标点Ei(xi,yi)到直线L12、L23的距离,如图6所示。
由图6可知,曲线的走势具有一定的稳定性,即可以利用距离将轮廓分段。本文根据聚类波峰波谷点实现轮廓分段。当某个点的二次差分值大于0,则该点表示波峰;当某个点的二次微分值小于0,则该点表示波谷。波峰波谷聚集情况如图7所示。
由图7(b)可知,波峰波谷聚集在4处,而且每一处的波峰波谷分布在同一个距离层次上,说明这4处的波峰波谷代表了4条平行于L12的直线;另外,共有波峰波谷聚集在4处,其中有2处分布在同一个距离层次上,说明这2处的轮廓出自同一条直线,因此表明组成建筑物的边界中有3条边平行于L23。
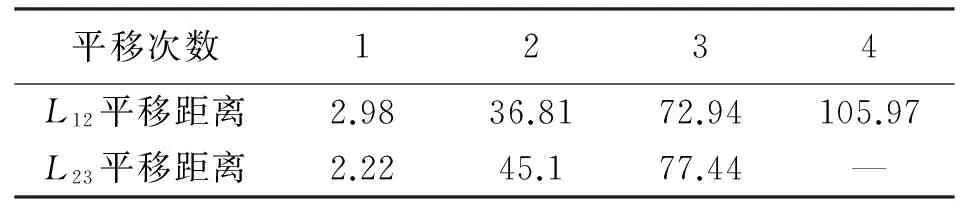
根据波峰波谷聚集的情况,以及在距离层次上的分布,计算出L12和L23平移的距离情况。最终的平移距离以每一个段中距离的平均值来表示,见表1。
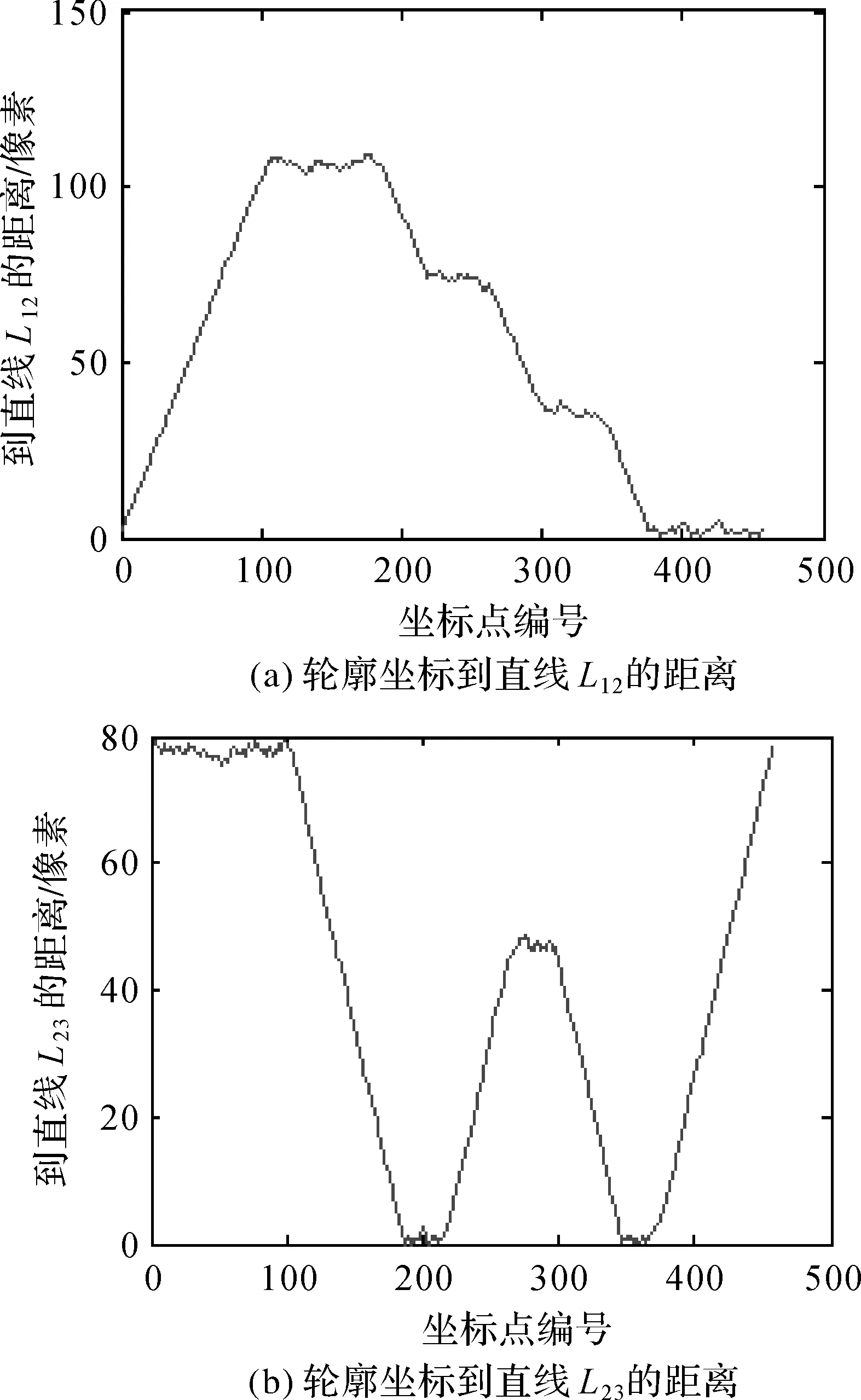
图6 轮廓坐标到MBR一对直角边的距离
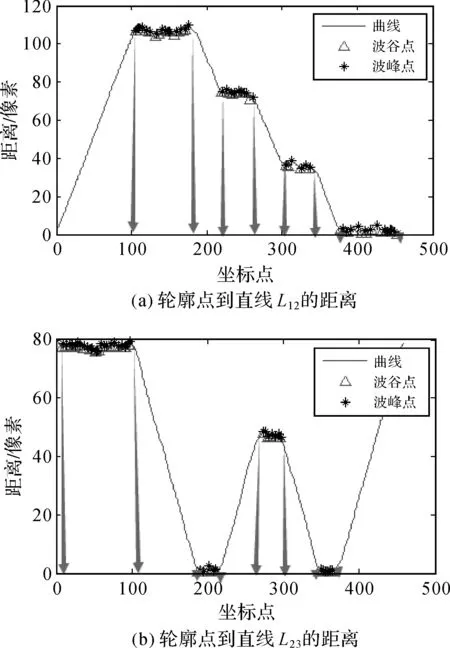
图7 根据波峰波谷的轮廓分段
上一个过程中共获得7条直线,分别代表着建筑物的7条边。而直线的交点则表示建筑物的角点或建筑物边上的点。7条直线彼此正交,产生了12个交点,交点的分布情况如图8所示。
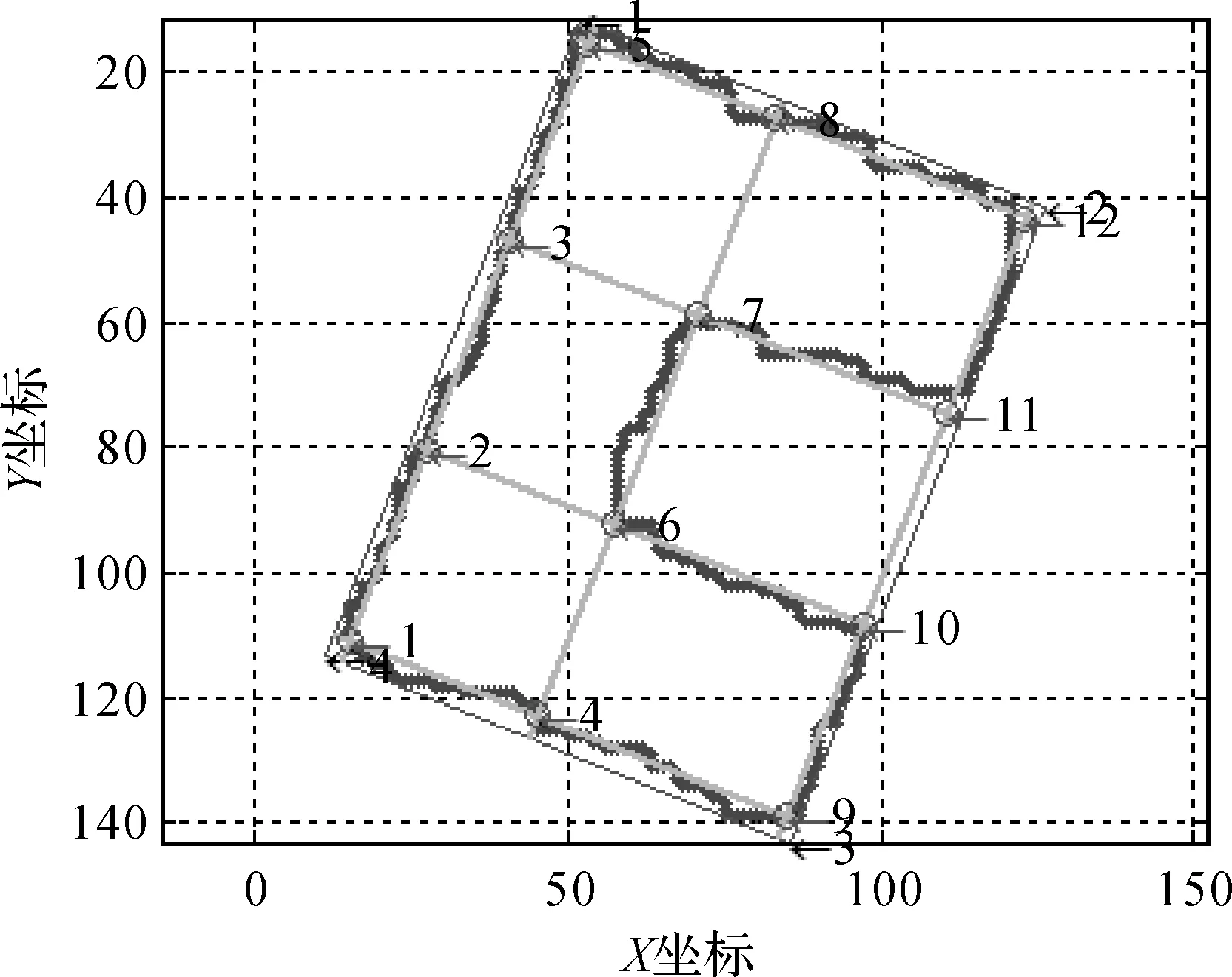
图8 MBR拟合直线的交点
计算轮廓片段的曲率圆心平均坐标,交点坐标曲率圆的结果如图9所示。
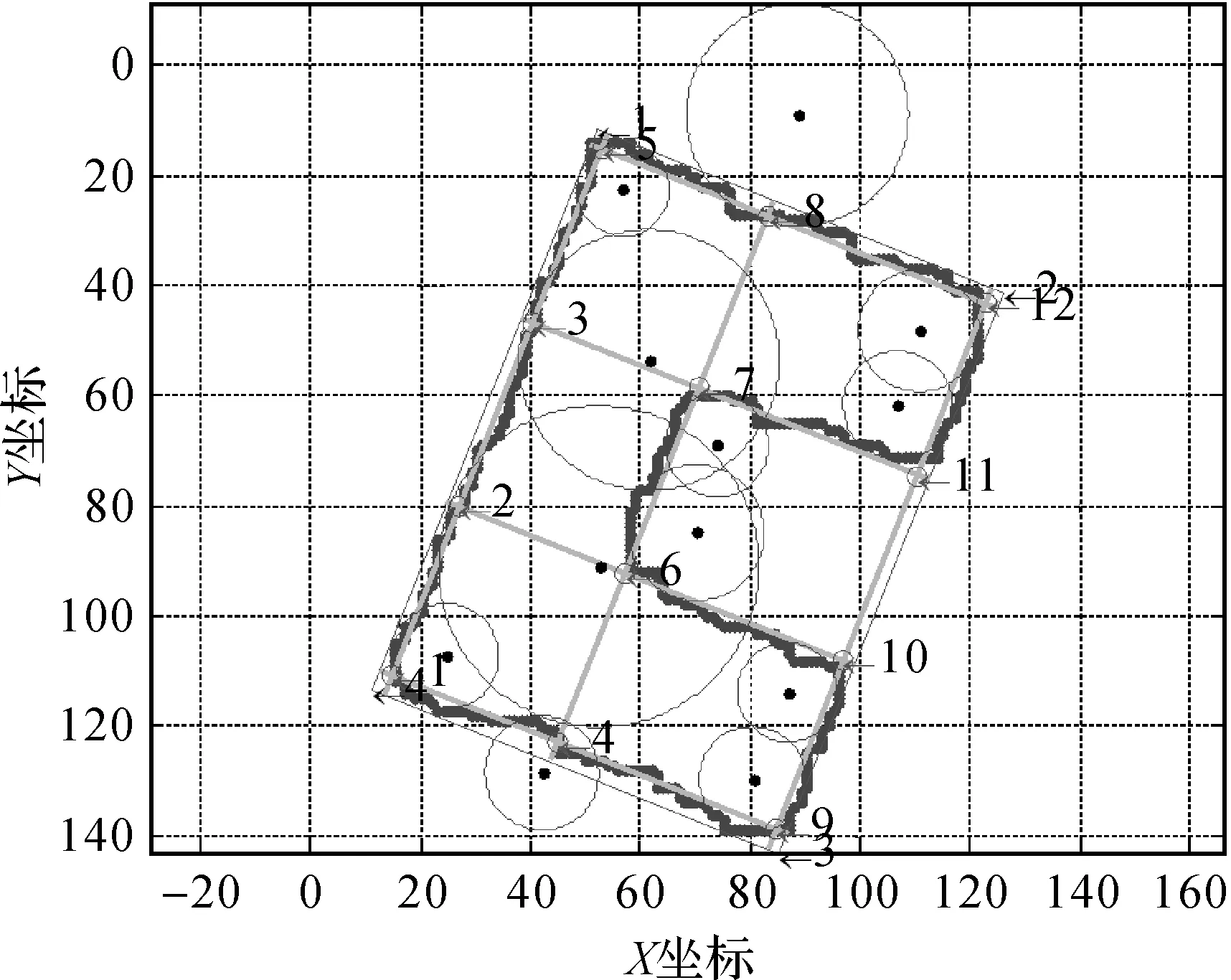
图9 轮廓片段曲率圆
从图9可以看到,非建筑物角点的交点,其区域内轮廓片段的平均曲率圆的圆心位于该交点局部坐标系的一对主方向轴上或在很小范围内波动。若位于副主方向轴上(或附近),则其行走方向为主方向走向;若位于主方向轴线上(或附近)则其行走方向为副主方向;若圆心落于该点相应的象限内则该点的行走方向为该象限的行走方向。根据各交点对应的平均曲率圆的圆心位置确定各交点的行走方向,如图10所示。
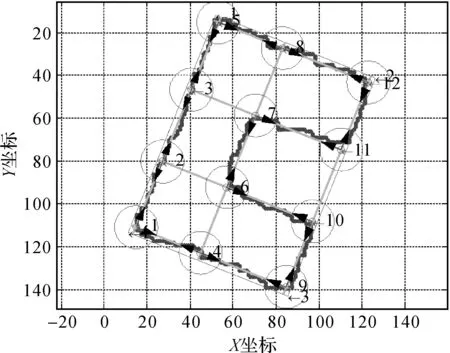
图10 交点行走方向确定
根据各角点的行走方向,把这些点依次连接起来形成一个封闭的正交多边形,这就是基于MBR标绘方法的建筑物标绘结果,如图11所示。

图11 基于MBR标绘结果
将标绘结果与人工标绘结果作对比,以人工获取的形状作为真实值,求出基于MBR标绘的结果精度(见表2)。将标绘结果的面积与周长作为评价指标,面积的相对误差为3.5%,周长的相对误差为4.6%。
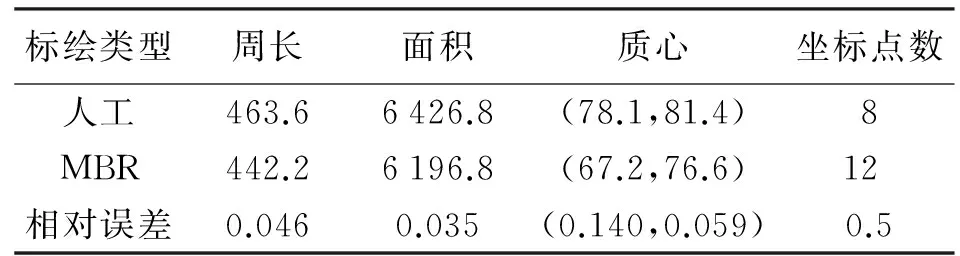
表2 基于最小MBR标绘的误差
2.2 试验2
试验2中选取一幅包含多个直角建筑的高分遥感影像,采用本文的技术方法进行建筑物标绘,并将标绘的结果与人工标绘结果作对比,如图12、图13 所示。
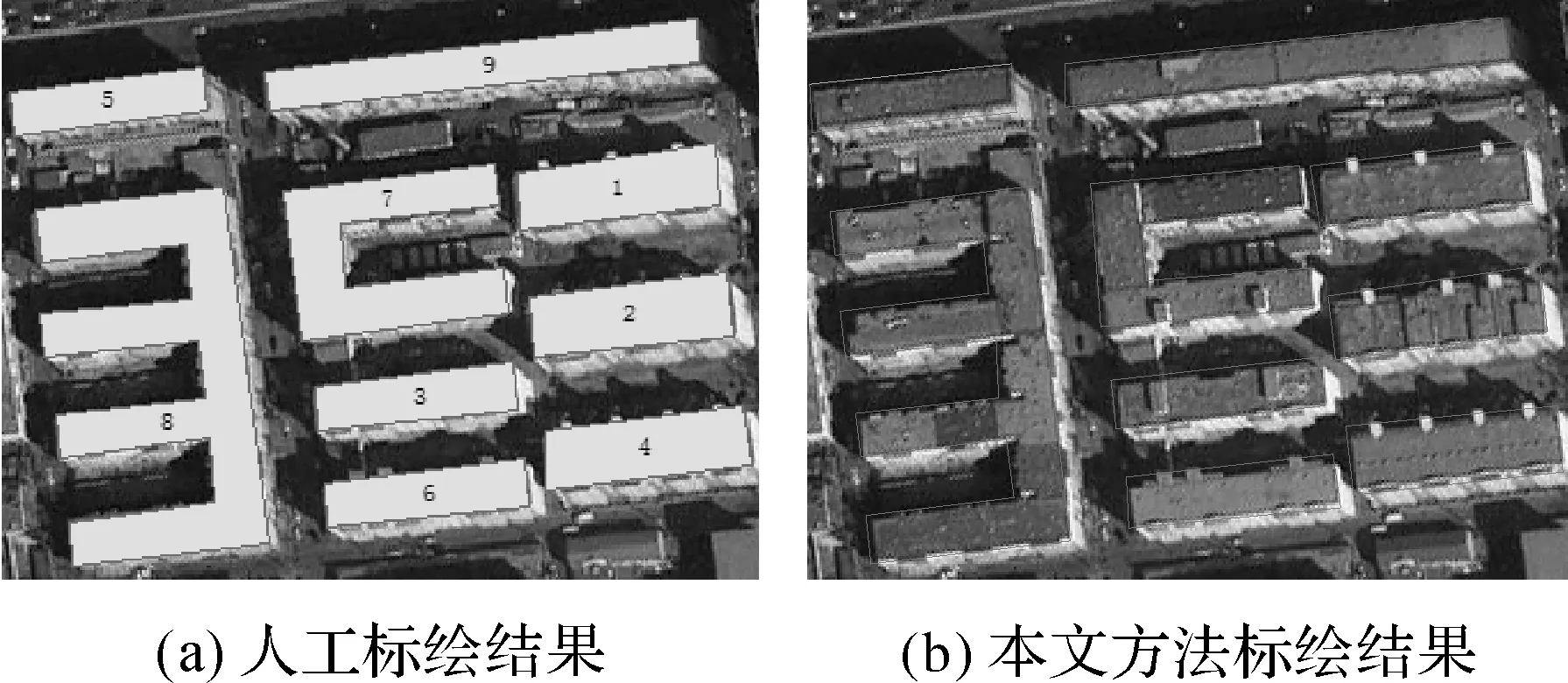
图12 直角建筑物自动标绘结果
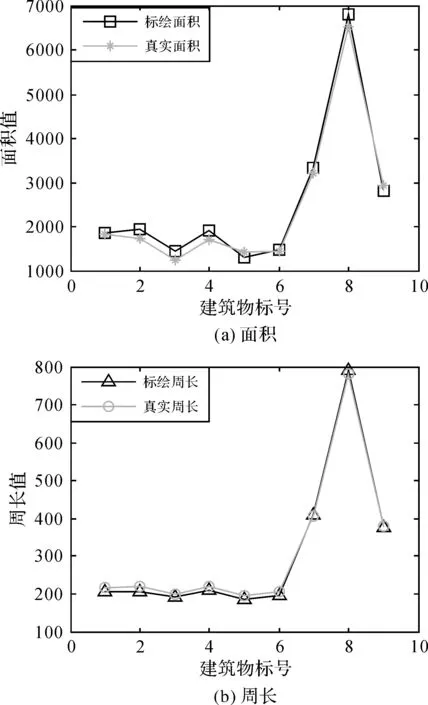
图13 本文方法标绘结果与人工标绘真实结果对比
从图13可以看出,选取的9个建筑物整体的标绘结果与实际值相差不多,其中面积自动标绘误差比周长的自动标绘误差稍大。然而面积自动标绘误差比周长的自动标绘误差稍大,引起这个现象的主要原因是因为原始高分辨率影像中一些非建筑物细节干扰信息很容易被误提取,从而引起粗轮廓提取精度降低。而周长的精度相对较高的原因是本文采取了MBR约束条件,保证了标绘过程中直线边界的几何特征与实际建筑物特征相符。最后统计全部9个建筑物自动标绘的面积和周长的平均误差,得出面积的平均精度为93.3%,周长的平均精度为96.1%。
3 结 语
本文基于建筑物的直角特征提出了一种高分辨率遥感影像中直角建筑物提取、标绘的新方法。主要针对直角建筑物进行标绘,并将MBR标绘方法用于实际建筑物提取与标绘中。本方法的流程中,CART分类树与多尺度分割结果包含误差,通过对建筑物轮廓分段拟合优化,可以有效去除粗提取建筑物结果中的边缘“毛刺”,并由建筑物轮廓线特征提取出建筑物角点,利用角点决策器确定各个角点的行走方向,通过对建筑物角点的精细化提取,成功标绘出建筑物信息,提高了高分遥感影像中建筑物提取的精度。
试验结果表明,本文所述标绘方法仅采用高分光学数据而无需激光雷达数据,研究的方法复杂程度低,建筑物提取速度快,易于实现。建筑物提取过程中影像质量、干扰地类等影响因素较多,目前光学影像中建筑物提取模型存在扰动性,边缘易产生错分和漏分现象,通过几何约束条件可以有效减少提取误差。因此,如何通过几何约束更加快速有效地提取并标绘出不同形状的建筑物,提高算法的稳健性为后续工作的研究方向。
参考文献:
[1] 张正,王宏琦,宁忠磊,等.高分辨率遥感图像中城区建筑物自动测绘方法研究[J].国外电子测量技术,2010,29(6):49-53.
[2] 孙金彦,黄祚继,周绍光,等.高分辨率遥感影像中建筑物轮廓信息矢量化[J].遥感学报,2017,21(3):396-405.
[3] BIOUCASDIAS J M,PLAZA A,CAMPSVALLS G,et al.Hyperspectral Remote Sensing Data Analysis and Future Challenges[J].IEEE Geoscience and Remote Sensing Magazine,2013,1(2): 6-36.
[4] 张祖勋,张剑清,胡翔云.基于物方空间几何约束最小二乘匹配的建筑物半自动提取方法[J].武汉大学学报(信息科学版),2001,26(4):290-295.
[5] CUI S,YAN Q,REINARTZ P,et al.Complex Building Description and Extraction Based on Hough Transforma-tion and Cycle Detection[J].Remote Sensing Letters,2011,3(2): 151-159.
[6] TURKER M,KOC-SAN D.Building Extraction from High-resolution Optical Spaceborne Images Using the Integration of Support Vector Machine (SVM) Classific-ation,Hough Transformation and Perceptual Grouping[J].Applied Earth Observation and Geoinformation,2015,34(2):58-69.
[7] WANG J,YANG X,QIN X,et al.An Efficient Approach for Automatic Rectangular Building Extraction from Very High Resolution Optical Satellite Imagery[J].IEEE Geoscience and Remote Sensing Letters,2015,12(3): 487-491.
[8] FAZAN A J,DAL A P.Rectilinear Building Roof Contour Extraction Based on Snakes and Dynamic Programming[J].International Journal of Applied Earth Observation and Geoinformation,2013,25(8):1-10.
[9] CHENG B,LIU Q,LI X,et al.Local Perception-based Intelligent Building Outline Aggregation Approach with Back Propagation Neural Network[J].Neural Processing Letters,2015,41(2): 273-292.
[10] CHAUDHURI D,KUSHWAHA N K,SAMAL A,et al.Automatic Building Detection from High-resolution Satellite Images Based on Morphology and Internal Gray Variance[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2016,9(5): 1767-1779.
[11] 程亮,龚健雅.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法[J].测绘学报,2008,37(3):391-393,399.
[12] 吕凤华,舒宁,龚龑,等.利用多特征进行航空影像建筑物提取[J].武汉大学学报(信息科学版),2017,42(5):656-660.
[13] 吴秀芸,李艳,周华.基于角点检测的建筑物轮廓矢量化方法[J].遥感信息,2011,17(5):95-99.
[14] HUANG X,ZHANG L.Morphological Building/Shadow Index for Building Extraction from High-resolution Imagery over Urban Areas[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2012,5(1): 161-172.
[15] QI Min,JIA Jiankui.Automatic Extraction of the Building Rectilinear Rooftops Based on Region over Growing[J].Journal of Computers,2014,9(10):2365-2370.
[16] 程效军,程小龙,胡敏捷,等.融合航空影像和LIDAR点云的建筑物探测及轮廓提取[J].中国激光,2016,43(5):253-261.
猜你喜欢
计算机仿真(2021年8期)2021-11-17
装备制造技术(2020年1期)2020-12-25
计算机系统应用(2020年1期)2020-01-15
制造技术与机床(2019年11期)2019-12-04
电子技术与软件工程(2019年9期)2019-07-12
学生导报·东方少年(2019年7期)2019-06-11
电子技术与软件工程(2018年10期)2018-07-16
数学学习与研究(2017年11期)2017-06-20
中国交通信息化(2017年4期)2017-06-06
青年时代(2017年3期)2017-02-17
