
轮毂电机驱动电动汽车的悬架定位参数优化分析
2018-05-14 15:33肖文文张缓缓轩飞虎
中国测试 2018年9期
肖文文 张缓缓 轩飞虎

摘要:针对轮毂电机驱动电动汽车由非簧载质量大而引起的平顺性问题,通过增加车轮的质量进行仿真实验验证非簧质量增大确实会影响轮毂电机驱动电动汽车的平顺性。为改善轮毂电机驱动电动汽车的平顺性,通过多体动力学仿真软件ADAMS/Car建立某汽车的整车模型并对其进行平顺性仿真分析,建立的整车模型仿真实验主要由前后车轮、前后悬架、转向系统以及四柱实验台等组成。通过选取适当悬架的硬点坐标作为优化变量,以影响悬架的前束角、主销内倾角、外倾角、主销后倾角等定位参数变化范围作为优化目标。通过仿真实验可以看出,优化后的外倾角、前束角等影响悬架的定位角参数的变化优于优化前,从而使得悬架的综合性能达到最佳。结果表明,优化之后的悬架硬点坐标可以有效地改善轮毂电机驱动电动汽车的平顺性。
关键词:电动汽车;轮毂电机;平顺性;定位参数;仿真分析
中图分类号:U1463.33 文献标志码:A 文章编号:1674-5124(2018)09-0148-05
0引言
轮毂电机驱动纯电动汽车在目前具有较好的发展前景,其具有可有效实现汽车尾气零排放、能源利用多元化、高效化等优点,且其直接或间接地把电机安装在车轮上,使得机械传动装置减少,这将提高电动汽车能源的利用率、续航里程和提供乘客更大的空间。但由于轮毂电机安装在车轮上使得电动汽车的非簧载质量增加,势必影响到电动汽车的平顺性。平顺性主要是保持汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定的界限之内。本文尝试通过优化悬架的定位参数,改善轮毂电机驱动纯电动汽车的平顺性。首先利用ADAMS/Car建立整车汽车模型对其进行平顺性仿真分析,通过改变车轮的质量分析悬架的底盘加速度的变化、悬架动挠度的变化以及车轮动载荷的变化来评价是否会对轮毂电机驱动纯电动汽车的平顺性产生恶化。然后利用ADAMS/INSIGHT对所建立的悬架进行定位参数的优化,将优化之后的悬架重新装配到整车模型中,对比分析优化的悬架是否可以有效地改善轮毂电机驱动纯电动汽车的平顺性。
1整车模型
根据轮毂电机驱动纯电动汽车的机构形式,在ADAMS/Car中建立前后悬架模型、车身模型、轮胎模型、转向器等。
假设所建立的各个模型的所有部件为刚体,零部件之间的连接都简化为铰链,不计内部摩擦,弹簧刚度和减震器阻尼均假设为线性的。
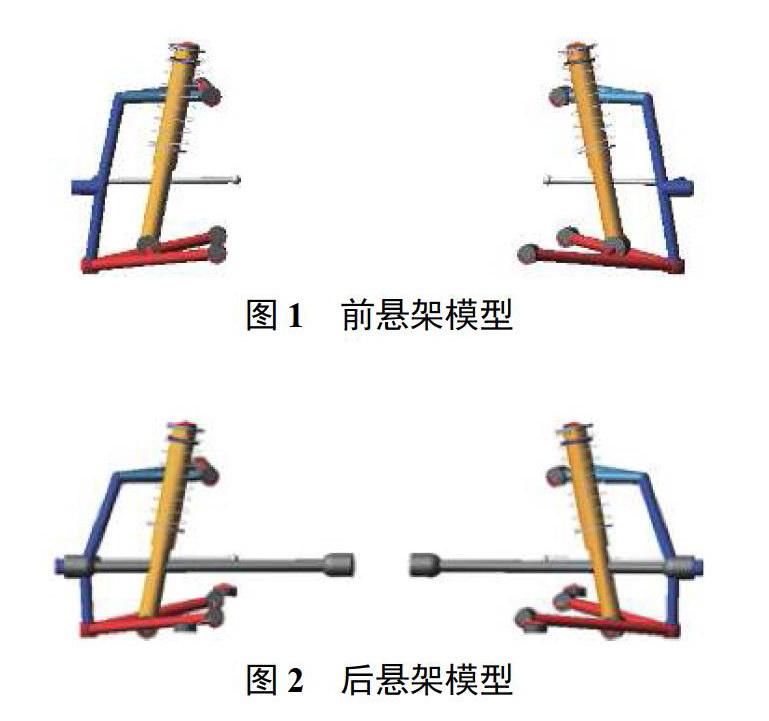
1.1前后悬架模型
根据实际情况,将双横臂悬架简化为由上横臂、下横臂、拉力杆、主销、转向拉杆和转向节等构件组成,如图1所示。其中双横臂悬架中的减震器使用螺旋弹簧来代替,且需要给螺旋弹簧设置刚度系数和阻尼系数,把减震器安装在汽车底盘和上横臂之间。转向节是固定在主销上,主销的连接方式是通过球副连接。上下横臂是通过旋转副连接在底盘上。拉力杆是直接固定在主销上的,其连接方式是通过固定副,且与转向拉杆连接,连接方式是通过球副。后悬架模型的建立同理,如图2所示。
1.2轮胎模型
在进行整车平顺性仿真时,轮胎是不可缺少的一部分。在ADAMS/Car中有两类轮胎模型,操縱型轮胎模型和耐久性轮胎模型。操纵型轮胎模型主要用于计算轮胎上的力和力矩,包括侧向力、径向力、回正力矩等,其评价的频率较低,只能在二维路面上进行分析。耐久性轮胎模型可以在不平路面上进行耐久性分析,评价频率高,充分地考虑了轮胎的包容性。根据仿真的需要,在进行平顺性仿真时,采用的是耐久性轮胎上的SWIFT(short wave-length intermediate frequency tire),该轮胎模型充分地考虑了分析截止和仿真时间的问题。
1.3转向系统模型
转向系统是汽车不可缺少的部分,本模型采用的是齿轮齿条式转向机构。汽车产生转向动作的过程:方向盘产生力矩或者是角度的输入,通过恒速度副传到转向传动轴荷转向电机;转向电机和车身通过转动副连接,转向梯形中的转向摇臂可以通过转动副进行相对转动。转动副和转动副之间通过耦合副传递方向盘的力矩或角度,如图3所示。
1.4整车模型的装配
本文采用的是FOUR-POST试验台如图4所示,对其进行平顺性仿真分析。车辆整车模型建好之后需要设定一定的整车参数。FOUR-POST试验台仿真整车平顺性模型,不需要设置转向系统传动比、制动力系统分配系数,只需要根据整车模型参数调整整车车身质心的质量和位置。
2整车平顺性仿真分析
2.1平顺性分析
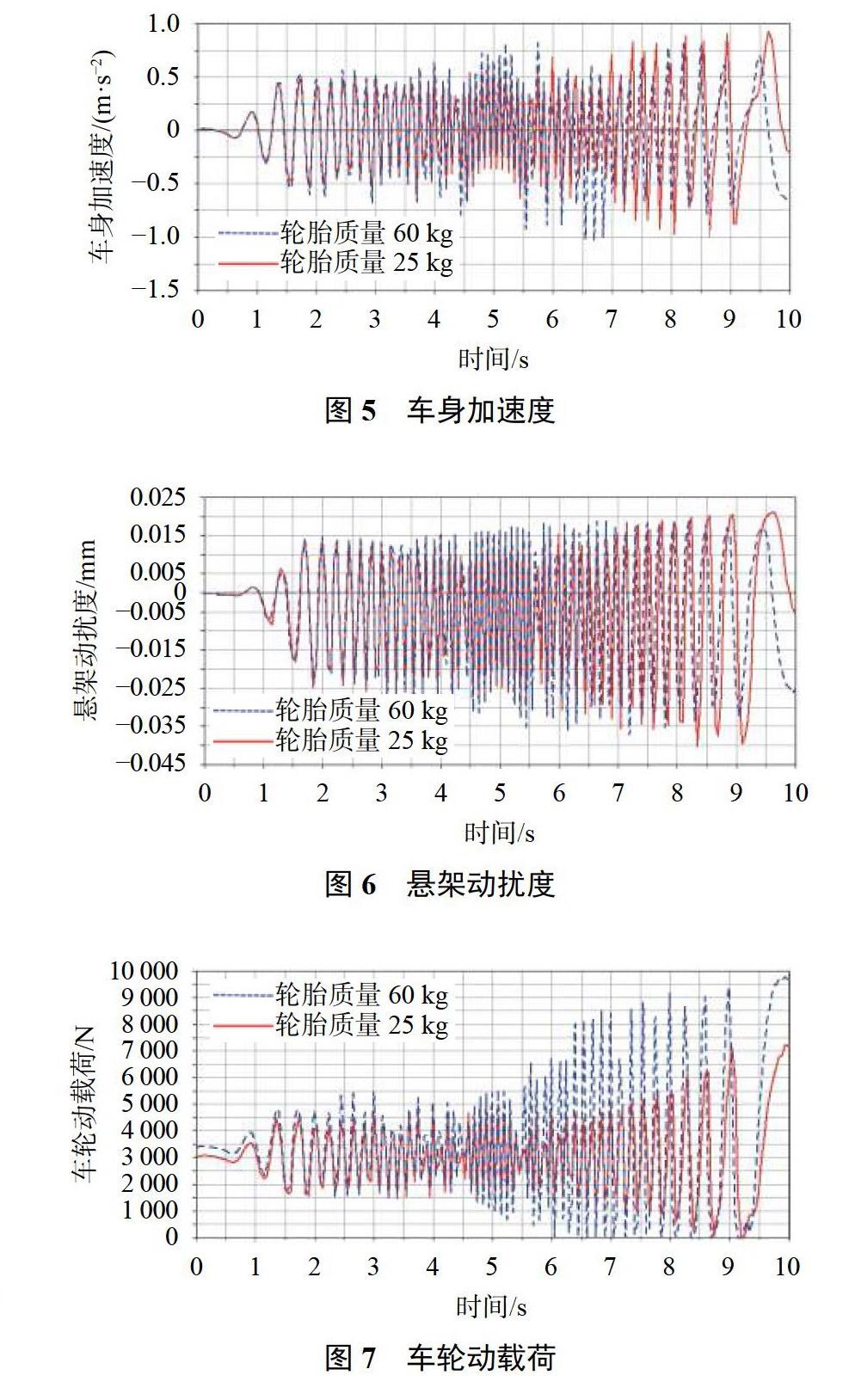
影响轮毂电机驱动电动汽车平顺性主要有悬架、轮胎、座椅、电机的质量和电机的振动。本文主要通过改变悬架的定位参数对前后悬架进行一定的优化,从而得出最佳的悬架定位参数,改善汽车的平顺性。研究汽车的平顺性离不开评价方法和评价指标,评价方法有主观评价方法和客观评价方法,本文采用的是客观评价方法。因本文重点是从悬架的角度来改善轮毂电机驱动电动汽车的平顺性,所以本文通过车身的垂向加速度、悬架动扰度、车轮的动载荷来表示轮毂电机电动汽车的平顺性。首先通过对25 kg和60kg的轮胎进行对比分析,表示增加35 kg的轮毂电机的质量对汽车平顺性的影响。设置仿真初始频率为20 Hz,仿真时间为10 s,仿真主要看车身的垂直加速度、悬架动扰度和车轮的动载荷。通过四柱台架对轮毂电机电动汽车进行平顺性仿真,结果如图5~图7所示。
可以看出增加轮胎的质量即增加非簧载质量,会恶化轮毂电机驱动电动汽车的平顺性。如图5所示,增加非簧载质量会增加车身的加速度。车身加速度增加得不太明显,但还是会从某种程度上对车身的平顺性造成一定的影响。同理可以看出悬架的动扰度变化也不是很明显,如图6所示。从图7可以看出增加非簧载质量对车轮的动载荷有着明显的影响,质量越大对车轮的动载荷影响也就越大,即增加非簧载质量恶化车轮动载荷。综上所述非簧载质量越大对轮毂电机驱动电动汽车的平顺性恶化就越严重。
2.2整车悬架分析
通过ADAMS/INSIGHT对前悬架优化分析,由于前后悬架都使用双横臂悬架,且左右悬架相互对称。所以本文主要研究前悬架的左悬架,同理可对前悬架的右悬架和后悬架的左右悬架进行256次迭代优化分析。在优化之前需要设置优化变量和优化目标,通过对悬架的初步分析找出对悬架的定位参数灵敏度较高的坐标点作为优化变量,优化变量如表1所示。对悬架进行平行车轮跳动试验,并且设置跳动的高度为上下各为50 mm,设置仿真类型为运动学仿真。优化目标为悬架定位参数,外倾角、主销后倾角、主销内倾角、前束角、前后轮距。
表2为各项指标的拟合值,各指标的R2都大于0.9,R2adj都是在1左右,表示悬架的定位参数的拟合效果较好。悬架定位参数的P都是为0,表示拟合中的有用项足够多。
由图8中可以看出外倾角的变化范围从-1.25°~1°优化为-1.75°~0.25°,外倾角优化效果较好。由图9可以看出,主销后倾角优化前后的变化范围,从5.300°~5.575°优化为5.400°~5.525°,主销后倾角在优化之后有增大的趋势,主销后倾角增大了0.15°左右,但还是在可控的悬架定位参数范围内。由图10可以看出,主销内倾角的变化范围从8.75°~11.4°优化为9°~11.4°。主销内倾角的变化范围在0.15。左右,对悬架的定位参数影响不大。由图11可以看出前束角优化前后的变化范围,从-0.5°~3.5°优化为-1.5°~2.25°,前束角优化的效果比较好。图12同理可得出轮距在优化前后的变化,优化后轮距有一定的增加,对悬架的稳定性有一定影响。
3整车平顺性仿真优化分析
把优化之后的悬架重新装配在整车模型中,再一次对整车进行平顺性仿真分析,仿真是把非簧载的质量调整为35kg即轮胎的质量为60kg,通过对比,分析优化后的悬架对整车平顺性的影响。
从图13~图14中可以看出优化之后的悬架对车身加速和整车悬架动扰度影响不是非常好。由图15可以看出优化之后的悬架对整车平顺性有着改善的效果,优化之后的悬架对车轮动载荷的优化效果最好。
4结束语
1)利用ADAMS/Car通过增加整车非簧载量即轮胎的质量进行平顺性仿真,从仿真结果中可以看出随着非簧载质量的增加,整车的平顺性恶化越来越严重,每增加20kg的非簧载质量,平顺性恶化25%左右。
2)通過对悬架坐标点的位置进行优化,优化之后的悬架可以对整车的平顺性进行优化,优化效率达到50%左右。这对轮毂电机驱动电动汽车具有重大的意义。
3)优化结果表明此优化方法对悬架的外倾角、主销后倾角和前束角的优化效果比较好,而对主销内倾角和轮距影响不大。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年15期)2016-06-30
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10
计算机应用文摘·触控(2014年4期)2014-02-22
