电梯顶部空间测试仪的研究
2018-05-15 11:32张安国嵇守航
中国特种设备安全 2018年4期
张安国 嵇守航
(大连市特种设备检测研究院 大连 116013)
1 前言
电梯顶部空间用于保护电梯轿厢顶部人员以及电梯顶部的各种机械,所以电梯顶部的安全空间必须达到国家标准,满足电梯安全技术规范TSG T7001(以下简称规则)的要求。轿厢顶部的安全空间是指对重完全压缩对重缓冲器时,轿厢顶部的相关安全尺寸需要满足规则附件A中3.2项的尺寸。很多建筑是完全参照标准楼层来设计,不过在后期的建造过程中,由于楼房建造偏差和后期对建筑进行修饰的需要,开发商订购超高的轿厢,导致电梯顶部的安全尺寸比国家规定的尺寸小,这样就必须采取有效的方法增加轿顶安全空间,这样直接导致对重的缓冲距离必须限制在一个很小的安全范围内。由于新的钢丝绳伸长相对较快,使得轿厢撞弓在撞击上极限开关前,对重已经压到缓冲器上,这样的设计无法符合国家标准和规则的要求。电梯维保单位有时会利用裁剪曳引钢丝绳长度的方法增加对重缓冲距离,这种做法会使对重缓冲距离保持在较大值,但是电梯顶部安全空间会受到影响而变小。电梯检验人员通常会测量对重缓冲距离来判断上极限开关是否会在对重撞击对重缓冲器前起作用,而忽视了对重缓冲距离对电梯顶部安全空间的影响。由此可见,电梯顶部空间是十分重要又极容易被忽视的关键点。
关于顶部空间的测量,规则中给出一个测量方法,但是此计算方法并不明确。作者通过查阅相关文献,得出计算方法为测量轿厢在上端站平层位置时的相应数据,对于蓄能型对重缓冲器,将测量结果减去缓冲器可压缩行程90%与对重缓冲距离的和;对于耗能性对重缓冲器,将测量结果减去缓冲器可压缩行程与对重缓冲距离的和,然后根据计算结果确认是否满足要求。[1]
在对电梯顶部空间进行测量时,需要至少两名专业人员配合,且有一名人员需要经过开层门上轿顶等一系列烦琐且存在一定安全隐患的操作步骤进入电梯井道。测量时操作人员处于顶部的较小密闭空间内,由于电梯自身故障等原因困人事故时有发生。除此之外,电梯井道内设备、部件等排列错综复杂,在狭小空间内操作人员稍有疏忽便会受到伤害。因此,需要研究一种新的检测方法,在提高检测效率的同时保障检验人员的自身安全,这样也可以让检验人员更加便捷、准确地测出轿顶空间的尺寸,以确保电梯的安全运行。
本文提出的测量方法可实现人机分离操作,人员只需在井道外便可进行测量,保证了相关人员的安全。并利用编程软件直接得出计算处理后的数据实现了便捷操作,免去了烦琐复杂的计算。目前国内对于顶部空间测量主要方法还是人工测量和计算,安全性和便捷性都较难保证。
2 系统设计
2.1 激光测距的原理
激光测距因为其自身的特点,有着很多无与伦比的优势:方向精确、抗干扰能力强、量程远、大气传输性好、测量速度快、测量精度高、隐蔽性好、对雨雾有一定的穿透力。
激光测距主要有两种方法:脉冲测距和连续波相位测距。本文设计的系统则使用脉冲测距来实现电梯顶部空间各尺寸的测量。
激光脉冲测距利用光的直射性,对所测物体发射一条光脉冲,测量到物体所用时间,算出目标距离。将发射端和物体之间的距离设为D,往返所需时间为t,而光的速度为c,(c≈3×108m/s,忽略光速c在空气中受到的影响)。根据物理学公式,式(1)成立:

使用激光脉冲测距,检测时长按照物体所接收到的脉冲数目进行分析。具体原理如图1所示。
设定激光振荡频率为f,在一段时间t内有N个时钟脉冲进入计数器,可得:

在式(2)中,L=c/2f,L越小,则代表精度越高。[2]
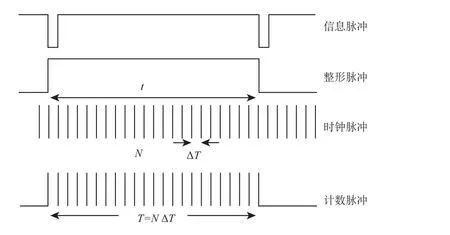
图1 激光脉冲测距原理波形图
2.2 ARM11开发板简介
本课题研究的测试仪选用的是飞凌公司生产的OK6410开发板(见图2),它是基于SAMSUNG S3C6410主处理器。该开发板运用的是“核心板与开发板”相结合的结构,而核心板和底板之间则采用品质优异的进口连接器,引脚个数为320个,这样也方便使用者可以对开发板进行二次开发,对其进行多形式的扩展,应用更广泛。
OK6410的软件支持多种系统,并开放源代码,使用者可以根据自己需要对其进行更改。而且,开发板也可连接与之相配套的WIFI模块、蓝牙模块等。

图2 OK6410开发板
2.3 整体设计思想
整个系统由放置于轿顶的下位机和井道外的上位机构成。下位机负责井道顶部的各部位数据的采集、存储、传输以及最终的打印测试报告。上位机负责与下位机的通讯,向下位机发送测量和打印指令,以及对采集到的数据进行处理。下位机则采用SAMSUNGS3C6410作为主处理芯片的ARM1l开发板、蓝牙模块和激光测距模块为开发的基础。上位机采用自带蓝牙模块的Android智能手机。系统的整个工作过程是:首先,在轿顶固定激光测距传感器,以便由激光测距传感器采集如图3所示四个部位的数据信息。图中H1代表轿厢导轨的进一步制导行程(轿厢在上端站平层时);H2代表井道顶的最低部件与曳引绳附件、导靴或滚轮、部件的最高部分或垂直滑动门的横梁之间的间距;H3代表井道顶的最低部件与轿顶设备的最高部件之间的间距(不包括钢丝绳附件、导靴等);H4代表轿顶可以站人的最高面积的水平面与位于轿厢投影部分井道顶最低部件的水平面之间的自由垂直距离。传感器固定完成后将轿厢开至顶层端站平层位置,上位机通过蓝牙与下位机取得连接。然后,上位机向下位机发送测量开始命令,激光测距模块可直接输出数字信号,经RS232串口以10位二进制编码的形式存储于开发板自带的256Mb NAND FLASH中[3]。接着,上位机发送数据传输命令,下位机通过蓝牙模块将数据发送。上位机按照设定的程序对接收到的数据进行处理、判断。最终,上位机向下位机发送打印命令,得到测量报告,测量完成。

图3 电梯顶部空间示意图
2.4 下位机设计
下位机是由四套激光测距模块、ARM11开发板、电源模块组成的系统,承担现场顶部空间测量过程中的数据的实时收集,根据内部编程的设计,将数据打成数据包,利用蓝牙模块传送到上位机,上位机发送打印指令由打印模块负责打印测量报告。下位机框图如图4所示。

图4 下位机框图
2.5 各模块选择
1)激光测距模块选用RealWave公司生产的RWRFA-5传感器,各项参数见表1。其测量范围为0.05~5m,满足常见电梯顶部空间的测量要求。测量精度和分辨率均为1mm,符合规则中规定的测量数据精度。其次,传感器可以发射640nm红色可见激光,便于测量过程中对需要测量部位的定位。该传感器支持RS232串口输出数据,可实现与ARM11开发板便捷的连接。

表1 RWRFA-5传感器的参数表
2)蓝牙模块采用BLE-CC41-A蓝牙模块,专为智能无线数据传输而打造。本模块支持UART接口,可与ARM11开发板实现无缝对接,具有成本低、体积小、功耗低、收发灵敏性高等优点。蓝牙4.0版本可以实现100m以上超长距离数据传输,即使在电梯井道的复杂环境中受多种因素干扰,亦可满足本系统的数据传输要求。
3)打印机模块选用EH48-B热敏式点阵打印模块。该模块采用DC 5V供电,打印速率可达60mm/s,打头寿命约为50km,可通过TTL串口与ARM11开发板连接,从而实现高速、便捷、持久输出测试结果。[4]
2.6 上位机软件设计
本课题利用C语言编写应用于智能手机Android系统下的显示、计算软件,实现对下位机发送测量、打印等相关指令,显示测量结果的功能,程序框图如图5所示。

图5 C语言程序框图
3 系统技术性能及指标
1)系统测量范围0.05m至5m。
2)测量精度±1mm。
3)智能手机遥控距离≤20m,数据接收距离≤100m。
4)综合测量误差≤1%。
4 仪器的使用及测量结果
使用仪器时,检验人员先进入轿顶,对实际情况进行初步判断,将四个传感器通过传感器固定夹垂直安装在轿顶H1、H2、H3与H4处,然后检验人员离开轿顶,通过上位机发送指令,进行测量和数据打印等操作。
本仪器对多个品牌的不同额定速度的电梯顶部空间进行测量(部分测量结果见表2),同时按照规则中要求的测量方法进行测量和计算,比较两者的计算结果,差距在2mm以内,结果较为满意。在本仪器系统的技术性能和指标范围内,适用于各类电梯顶部空间的测量。在无机房电梯的使用上效果明显,原因是无机房电梯顶部空间相对小,检验人员测量不方便、危险性较大,而使用仪器进行远程测量,可以很好地克服这些缺点。

表2 仪器多次测量结果与人工测量结果比较
5 结论
本测试仪具有安全性好、测量便捷,且不受空间以及电梯种类限制等特点。真正意义上实现机房与井道之间的遥控测量,避免了困人事故的发生,降低操作人员的风险性。但是在使用仪器时,检验人员能否正确选择传感器安装位置,对测量结果的准确性有一定的影响。在今后的使用和仪器开发时,可以优化、更新数据通讯方式,这样可以使得整个仪器有着更好的实时性,以及更精确的结果;硬件系统设计,主要采用模块化设计,硬件整体有些冗余的部分,系统整体的可靠性和稳定性还有待于提高。
参考文献
[1]常寅飞.一台曳引驱动电梯顶部空间检验结果的判定[J].中国科技纵横,2013 (17):139-140.
[2]吴应明.便携式脉冲激光测距仪的研制[D].西安:西安电子科技大学,2009.
[3]王红亮,符多,铎广威,等.基于ARM的数据采集存储系统设计[J].火力与指挥控制,2014,39(01):120-121.
[4]陈子龙,张红雨,李俊斌.蓝牙4.0无线传感网数据采集及以太网传输设计[J].电声技术,2013,37(10):74-77.
猜你喜欢
舰船电子工程(2020年5期)2020-07-09
中国特种设备安全(2019年8期)2019-10-14
中国特种设备安全(2019年4期)2019-05-20
中国特种设备安全(2019年2期)2019-04-22
综合智慧能源(2019年1期)2019-01-29
科技与创新(2018年1期)2018-12-23
中国特种设备安全(2018年10期)2018-12-18
电子制作(2017年22期)2017-02-02
北京纪事(2016年5期)2016-05-07
物联网技术(2015年11期)2015-11-26