
一种新型擦窗机底座的应用研究
2018-05-18 12:33李玉杰谢丹蕾孔园春
建筑机械化 2018年4期
李玉杰,谢丹蕾,李 沿,孔园春
(1.中国建筑科学研究院有限公司 建筑机械化研究分院,河北 廊坊 065000;2.廊坊凯博建设机械科技有限公司,河北 廊坊 065001)
擦窗机作为一种常设高空作业载人设备,对其安全性和可靠性要求非常高,各个部件都必须具有足够的强度和承载力,特别是擦窗机的底座,承载着整个擦窗机的重量及其载荷,其结构复杂,臂长30m以上的擦窗机,底座的外形尺寸达到了3.5m×3.5m~4m×4m,在满足承载力的要求下,组装运输方便也是设计的重要参数要求之一。基于这些设计需求,我们提出了一种新的底座组装连接方式,通过计算以及实际工程应用表明,该底座具有可推广性。
1 擦窗机整体结构
擦窗机主要由臂头、伸缩吊臂、立柱、卷扬机构、底座等组成,如图1所示。擦窗机工作时,放置在建筑物楼顶,主要通过臂头、伸缩吊臂、回转机构来使吊船接近建筑物的外立面,完成建筑物外立面的清洗、保养以及维护工作。

图1 擦窗机主要结构示意图
2 底座的结构形式
图2是两种底座连接方式的结构示意图,本文所研究的底座主梁和侧梁连接方式是销接,以往的连接方式是螺栓连接。销接工作可靠,拆卸方便;螺栓连接虽然能精确固定被连结件的位置和承受一定的横向力,但是加工精度要求高。
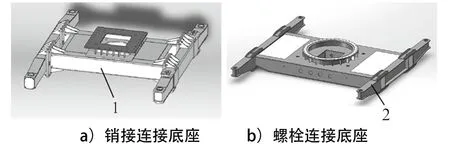
图2 底座结构示意图
该底座4m×4m的尺寸可分解为主梁2m×3.5m和侧梁0.3m×4m的外形尺寸,这样的安装连接方式便于运输。
3 底座危险工况的确定
擦窗机的底座要承受所有部件的重量及其工作载荷,这些载荷可简化为回转以上的力P1(旋转部件载荷)和回转以下的力P2,绕着旋转部件重心的前后弯矩差M,这些表现在底座上的力是4个轮压,如图3所示,轮压计算公式如下。
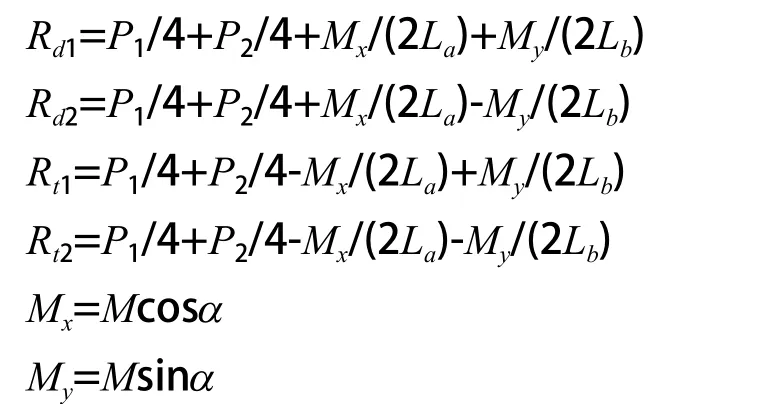
式中α——吊臂与底座中心线的夹角,与主回转转动的角度有关;
P1——回转以上部件的重量;
P2——回转以下部件的重量;
Mx、My——旋转部分载荷向旋转中心转化的力矩在x、y方向的分力矩;
La、Lb——分别是底座的轨距和轮距。

图3 轮压计算示意图
P1,P2是设备所有部件的自重以及所有载荷,是常量,M是绕着旋转部件重心的前后力矩差,与回转以上部分的重心有关系,重心不变,相对也是常量。显然,当a=45°时,轮压最大,即底座受力最大,此工况为底座最危险工况。经计算,可得各轮压如下:Rt1=33.8kN,Rt2=92.5kN,Rd1=92.5kN,Rd2=161.3kN,可见,最大轮压Rd2=161.3kN。
4 底座侧梁的计算
侧梁最危险截面是侧梁与主梁销接处,侧梁受力示意和截面如图4所示。

图4 侧梁受力示意和截面图
图4中,F等于最大轮压Rd2,即F=161.3kN;L=0.65m。
截面的抗弯模量W1=1010667mm3;则

侧梁的材料是Q235B,根据GB19154-2017要求,安全系数n=1.5。则:

满足强度要求。
5 整体结构计算
擦窗机的底座承载着整个擦窗机的重量及其载荷,其结构复杂,传统计算方法在整体应力和变形及其局部应力计算都受到了一定的限制。用有限元方法对擦窗机底座进行辅助设计,既提高了工作效率又可使计算精度大大提高。
在有限元计算中,模型的简化至关重要。底座是箱形结构,为了保证计算结果的可靠性,底座金属结构采用板壳单元进行模拟,立轴及其驱动轮轴都用梁单位模拟,由上述可知底座最危险的工况为吊臂夹角为45°时的工况,为了模拟吊臂45°方向对底座受力的影响,模型还包括了伸缩吊臂和立柱,两者都用梁单元模拟。
由计算结果可知,底座最大应力为113MPa,满足强度要求。最大应力出现在侧臂与主臂连接销子附近上盖板与腹板的连接处,说明两立轴的距离决定着附近侧臂盖板和腹板连接处应力的大小;最大位移为1.8mm,在底座的跨中位置,满足GB19154-2017挠度不大于1/200的要求,满足刚度要求。因此该底座在额定载荷下,能保证安全工作。
6 结 语
该底座在车间组装过程中拆卸方便,已经应用在多个工程项目中,擦窗机在运行过程中,底座受力平稳,工作可靠。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
一重技术(2021年5期)2022-01-18
数学小灵通(1-2年级)(2020年9期)2020-10-27
石油和化工设备(2020年5期)2020-06-09
当代贵州(2019年41期)2019-12-13
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
大陆桥视野·下(2017年8期)2017-09-19
中国共青团(2015年7期)2015-12-17
制造业自动化(2014年9期)2014-12-19
