
基于多体制的空天飞行器在轨相对导航系统架构研究
2018-05-23 00:45,,,,
计算机测量与控制 2018年5期
,, ,,
(中国运载火箭技术研究院研究发展中心,北京 100076)
0 引言
随着空间技术的迅猛发展,航天器的在轨服务、编队飞行等任务已越来越引起世界各航天大国的重视,具有广泛的市场应用前景。同时伴随着人类探索、开发和利用外层空间的工作地深入,对航天技术也提出了更高的要求。诸如故障航天器的在轨捕获与维修、空间垃圾清除、航天器高精度快速对接等内容已成为航天技术发展需要面对和解决的课题。据统计,目前在轨废弃卫星的数量接近两千多颗。2009年2月,欧盟航天局(ESA)报告指出[1],截止2008年底,地球静止轨道内直径超过一米的已经探明的障碍物数量有约1 186个,处于失控状态的有805个。欧洲航天局(ESA)预测,以当前形势发展下去,到21世纪30年代前后,在轨碰撞概率将高达3.7%,即卫星总数的1/25将有可能发生碰撞行为[2]。 因此,以卫星维护维修、寿命保证和轨道垃圾清除以及航天器高精度快速对接技术为核心的在轨服务技术成为了各国学者研究的热点和难点。 构建空间在轨服务系统,开展在轨服务以及相关技术的研究具有重大意义,而在轨相对导航是解决上述问题必需的关键技术之一。
1 相对导航技术的发展现状
美国新一代天地往返飞行器X-37B已开展了多次在轨试验,包括在轨维护、在轨抓捕、在轨逼近等任务,这一系列任务的完成离不开相对导航技术的支撑,通过相对导航来获取飞行器间的相对位置、姿态等状态信息。目前在轨相对导航技术主要分为两类,一类是针对合作目标的相对导航测量技术,一类是针对非合作目标的相对导航方式,主要应用技术如下。
1.1 相对差分卫星导航技术(RGNSS)
相对差分卫星导航是指追踪航天器利用带有RGNSS功能的接收机获取目标航天器GNSS的原始测量数据信息,采用相对定位技术测量追踪航天器与目标航天器之间的相对位置和速度的信息。RGNSS导航方式根据原始测量信息的不同可分为伪距差分和载波相位差分,利用伪距差分和载波相位差分信息建立描述原始测量信息差分与相对状态关系的观测方程[3]。
伪距差分,保证了相对测量的稳定性,但伪距测量自身的噪声较大;采用载波相位差分技术可获得高精度的测量结果,测量噪声较小。因此,空间远距离(10 km外)下的相对导航因对精度要求较低,可选伪距差分方式,近距离下的在轨任务优选载波相位差分方式来进行相对导航,以保证获得较高的导航精度。
1.2 视觉相对导航技术
根据参与相对导航相机的数量可分为单目视觉的测量方案和立体视觉测量方案。单目视觉测量方式采用单个相机对目标进行成像,立体视觉采用多个相机测量目标上的特征点。利用目标航天器上特征点信息,建立测量相机与目标航天器间相对位姿与图像信息的关系方程,通过求解该方程解算出追踪航天器与目标航天器间的相对位置、相对速度、相对姿态等信息。
基于视觉的相对导航技术一般应用于近距离工况合作目标的导航测量,在目标抓捕、逼近、对接的最后时段使用。
1.3 激光雷达成像相对导航技术
激光雷达成像技术具有抗干扰能力强、受光照条件影响小、测量精度高的特点,常应用于对非合作目标的相对导航测量。如美国航天飞机上采用的LDRI(Laser Dynamic Range Imager)系统,加拿大OPtech公司和MD Robotics公司的激光成像雷达系统LAPS(LIDAR-based Autonomous Planetary Landing System)、Neptec公司研制的Tridar敏感器,国内有中国科学院上海技术物理研究所研制的激光三维成像仪等等。
激光成像技术测量原理就是利用激光雷达获取非合作目标上的三维点云数据,通过对点云数据的处理来获取追踪航天器与目标航天器间的相对位置、相对姿态测量信息。
1.4 组合相对导航技术
除了上述几种单一的相对导航技术外,工程上还常常采用两种及以上相对导航技术的组合导航,来提高系统的可靠性、任务适应能力及导航测量精度。如卫星导航技术与激光成像导航技术的组合,惯性导航与激光成像导航技术的组合等等。
2 空天飞行器相对导航系统设计
2.1 总体思路
本文提出的相对导航系统可适用于对合作目标、非合作目标及半合作目标飞行器的逼近、捕获任务需求,以高精度惯性测量信息为基础,通过采用配备双目视觉测量相机的激光立体视觉测量系统(Tridar),实现对目标的重构和相对位姿确定,同时利用与飞行器上GNSS接收机一体化设计的RGNSS模块实现对合作目标的相对定位功能。具体导航模式思路如下:
1)针对非合作目标:激光立体视觉测量为主份模式,双目视觉测量为备份模式,可获取非合作目标测量信息;
2)针对合作目标:RGNSS作为主份模式,地面引导为备份模式,用于获取合作目标测量信息;
3)针对半合作目标:采用“Tridar+RGNSS”相对导航模式。
2.2 系统方案设计
2.2.1 硬件架构设计
空天飞行器相对导航系统从硬件架构上所配置的敏感器主要有三类,包括RGNSS、激光立体视觉测量系统(兼顾双目相机测量功能)和高精度惯性测量组合,系统架构如图1所示。

图1 空天飞行器相对导航系统架构
2.2.1.1 RGNSS导航设备
RGNSS相对导航功能可以通过追踪飞行器上的GNSS功能一体化设计实现。追踪飞行器上的GNSS接收机接收目标飞行器的GNSS原始测量数据,经过差分解算计算出两个飞行器间的相对位置和相对速度。该方案具备GPS单星座的绝对定位和相对定位功能(位置差分、伪距差分和载波相位差分)、BD+GPS联合的绝对定位功能和相对定位功能(位置差分)、BD单星座模式下绝对定位和相对定位功能(位置差分、伪距差分和载波相位差分)。
接收机依据使用的原始观测量不同可以分为伪距差分和载波相位差分,可将接收机的相对定位功能分为选择共视卫星功能、伪距差分定位功能、整周模糊度初始化功能、载波相位差分定位功能。
1)选择共视卫星功能:根据接收到视频卫星的原始观测量,GNSS接收机采集比对同一时刻数据,选取同时接收到的相同卫星,保留其观测量并剔除无法共视的原始观测量,完成共视卫星的选择。如果当前时刻共视卫星小于5颗,则无法完成相对定位功能。
2)伪距差分定位功能:依据共视卫星选择功能保留的原始观测量,选取仰角最高的卫星作为主星,采用伪码观测量进行双差处理得到双差伪码观测量,依据最小二乘原理构建双差观测方程并进行伪距差分相对定位解算。
3)整周模糊度初始化功能:在GNSS接收机能进行伪距差分定位功能的前提下,与双差伪距观测值同时构建双差载波相位观测值,将初始的双差整周模糊度作为未知参数,通过多个历元迭代的方式建立双差观测方程;采用最小二乘方式得到双差模糊度的浮点解以及协方差矩阵,通过LAMBDA方法获得双差整周模糊度方程的值;满足检验条件的双差整周模糊度作为可用的双差载波相位观值,进行载波相位差分相对定位。
4)载波相位差分定位功能:利用原始载波相位观测值构建双差载波相位观测值,并利用已经初始化的载波相位双差观测值,构建双差观测方程,未知数即为GNSS接收机与视频卫星的相对位置,通过最小二乘的方式进行迭代获得最终的相对位置解,其解算步骤同伪距差分定位功能。
2.2.1.2 激光立体视觉测量设备
兼具双目相机设计的非合作目标激光立体视觉测量设备(Tridar)可以实现中远距离目标的搜索测距、近距离与超近距离目标的位姿测量以及近距离对目标飞行器的三维形貌重构。通过双目相机将测得的目标飞行器图像信息利用图像处理算法产生区域图像,再利用附加图像处理算法从目标区域图像中产生目标姿态信息,实现追踪飞行器与目标飞行器间的相对姿态测量。
2.2.2 软件方案
1)立体视觉与运动模型信息融合。
设计扩展卡尔曼滤波器(EKF)实现立体视觉与运动模型的信息融合,首先建立基于立体视觉系统的测量模型,然后根据相对位置模型和相对姿态模型融合为一个状态方程,从而使得该滤波器在估计追踪飞行器与目标飞行器间相对姿态的同时能够给出相对位置,具体逻辑如图2所示。
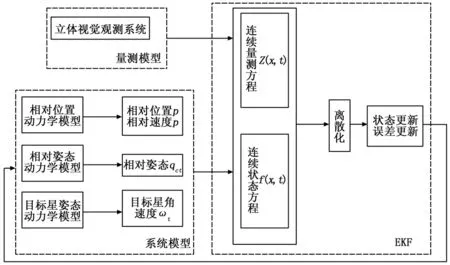
图2 立体视觉与运动模型融合算法示意
2)基于状态观测器的相对位置估计。
针对追踪飞行器与目标飞行器相对位置模型的线性特性,采用线性状态观测器进行相对位置估计。假设激光立体视觉测量设备已经采集到目标飞行器表面的特征点图像若干,从中选择三个特征点s1、s2、s3,计算特征点在目标飞行器坐标系下的三维坐标。特征点与追踪飞行器本体系oc-xcyczc的空间关系如图3所示。

图3 特征点在两个坐标系间的转换关系
3)基于M-估计的滤波抗差。
由于本文所采用的测量传感器是立体视觉系统,空间中光线等因素的影响都可导致光学系统成像存在较大粗差,粗差的存在必将对估计结果产生较大的影响,降低近距离导航的精度。为提高定位导航的精度和可靠性,本方案中采用稳健M估计的方法来对抗观测过程的粗差[4]。
2.3 系统仿真
2.3.1 相对导航和Kalman滤波器设计
相对导航模块利用惯组和Tridar进行信息融合,从而获得追踪飞行器与目标飞行器的相对位置和相对速度信息。本文利用Kalman滤波方法对惯组输出的视加速度信息和Tridar输出的位置信息进行融合。相对导航Kalman滤波的状态变量设为:
(1)

根据式式可以得到Kalman滤波离散化的状态方程:
Xk+1=Φk+1,kXk+Bkuk+Gkωk
(2)
其中:Φk+1,k为状态转移矩阵,Gk为系统噪声输入矩阵,uk为控制输入(即控制力产生的ax、ay、az),Bk为控制输入矩阵,ωk为推力偏斜产生的机动加速度偏差,视为高斯白噪声。
根据Tridar测量信息,可以得到Kalman滤波离散化的观测方程:
(3)
其中:zk为观测向量,Hk为观测矩阵,vk为观测噪声。
控制输入uk的周期为160 ms(惯组输出周期),Tridar输出信息得到的观测向量zk的周期为1 s。因此,当平台接收到Tridar信息时,相对导航滤波算法如下:
(4)

当平台未接收到导引头信息时,相对导航滤波算法如下:
(5)
2.3.2 仿真条件
1)三轴姿态控制门限为0.5°,x、y、z三方向位置控制门限为0.1 m;
2)Trdiar相对位置测量精度取为0.05 m;
3)仿真初始位置为(-10,0,0)m,接近至(-1,0,0)m位置后进行位置保持,仿真时间为6 000 s,仿真周期为160 ms;
4)相对导航模块采用惯组和Tridar信息融合的组合导航方案,获取追踪飞行器相对目标飞行器的位置和速度信息。信息融合方法采用Kalman滤波方法,将惯组输出的视加速度信息和Tridar输出的相对位置信息进行融合,惯组数据更新周期为160 ms,Tridar数据更新周期为1 s;
5)仿真中未考虑空间环境干扰力矩,及机械臂、发动机羽流等其它干扰;
6)仿真中各项参数均为标称值,未考虑各种偏差影响。
2.3.3 仿真结果
目标飞行器基于该方案的在轨道坐标系下位置误差、速度、姿态角误差和姿态角速度仿真曲线见图4~图15。

图4 x方向误差 图5 y方向误差
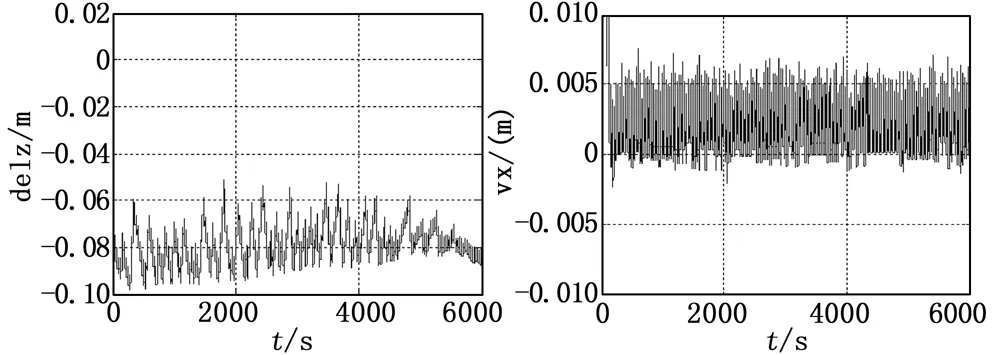
图6 z方向误差 图7 x方向速度

图8 y方向速度 图9 z方向速度

图10 俯仰角 图11 偏航角

图12 滚转角 图13 滚转角速度

图14 偏航角速度 图15 俯仰角速度
由仿真结果可见,目标飞行器三方向位置误差分别为0.098 m、0.095 m、0.096 m,速度分别为0.008 m/s、0.007 m/s、0.007 m/s,姿态角误差分别为0.42°、0.46°、0.49°,姿态角速度分别为0.040°/s、0.030°/s、0.044°/s。
仿真试验证明了基于多体制的空天飞行器在轨相对导航方案的可行性,可以满足逼近、绕飞、抓捕等在轨任务对相对导航系统的需求。
3.2.4 突破的关键技术
高精度的相对导航测量是实现空间高精度在轨操控的前提,设计一个适用于多目标测量高集成度的相对导航系统对于空间、重量约束较为苛刻的空天飞行器尤为重要。本文提出的相对导航方案既兼顾了合作目标的导航测量又具备对非合作目标的相对导航功能,实现了一套系统兼顾多目标特性,有效扩展了飞行器在轨操控的应用范围。体现的主要关键技术是:
1)通过采用基于多信息源融合的相对导航算法实现了无特征光源情况下的近距离高精度相对定位定姿;
2)为实现系统的小型化,本文提出的相对导航系统采用集成化设计理念,实现了RGNSS与常规GNSS一体化设计、双目测量系统与激光立体视觉测量系统的一体化设计,最终实现了针对合作目标和非合作目标测量的一体化设计,最大程度提高了系统集成度,可有效优化系统的重量、功耗指标。
4 结束语
在轨相对导航技术是实现空间目标交会对接、在轨服务等任务的关键技术之一。本文提出的基于多体制的空天飞行器在轨相对导航系统可以满足未来在轨操控任务的需求,在各类需执行空间操控任务的新型航天器在轨GNC系统方案设计中具有广阔的应用前景。
参考文献:
[1] Choc R,Jehn R. Classification of Geosynchronous Objects,Issue 11[R]. European Space Agency,European Space Operations Centre,Space Debris Office,2009.
[2] 梁 斌,杜晓东,李 成,等.空间机器人非合作航天器在轨服务研究进展[J]. 机器人,2012,34(2):242-256.
[3] 王 威,郗晓宁.GPS用于编队星座的姿态与相对位置确定[J].空间科学学报,2002,22(2):163-164.
[4] 于晓婷.基于立体视觉的非合作航天器近距离相对导航[D].南京:南京航空航天大学,2015.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
数学杂志(2022年5期)2022-12-02
地理空间信息(2022年10期)2022-10-31
湘潭大学自然科学学报(2022年2期)2022-07-28
导航定位学报(2021年5期)2021-10-13
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
