试论新型精密滚动摩擦传动凸轮系统在无人机上应用的可行性
2018-05-31 07:21崔芹芹
时代汽车 2018年1期
崔芹芹
沧州巨擎汽车配件有限公司 河北省沧州市 062461
1 对于无人机的认识
(1)无人机,简称UAV(Unmanned Aerial Vehicle),指不载有操作人员、利用空气动力起飞、可以自主飞行或遥控驾驶、可以一次使用也可以回收使用的、携有致命或非致命有效负载的飞行器。
(2)无人机的组成:无人机一般由飞机平台系统、有效载荷系统(信息采集系统)和地面控制系统三大部分组成。飞机平台系统和有效载荷系统组成了整个飞行器,根据负载能力和实现任务的不同,一个平台可以搭载多套有效载荷系统,实现复杂功能。
(3)无人机家族体系庞大,当前无人机市场以固定翼和旋翼无人机为主。
(4)一种无人机光电载荷,由20X变焦可见光电视,宽/窄现场可切换长波前视红外和重频5Hz的脉冲激光测距机构成,紧凑安装在25μrad稳定精度的两轴四框架稳定上,该光电载荷下传到地面站的图像清晰,目标定位数据可信,定位精度满足技术要求。
2 认为无人机有3个方面可以改进
2.1 对于20X变焦可见光CCD电视
作为主要的测量定位用光电传感器,20X变焦可见光CCD电视除满足连续变焦过程中成像清晰,视轴不跳动和焦面重复性好等常规要求外,还要保持足够高的焦距输出精度、制约变焦过程中重心的变化,以及做好与激光接受共光路的设计。
由于20X变焦可见光电视的稳定精度取决于两轴四框架控制的稳定平台,而两轴四框架的传动控制采用了导槽、导轮和凸轮传递,对传递凸轮的制造精度要求高,振动和噪声要求严格。
2.2 对于无人机动力系统
尽管无人机的动力系统经常配备有:活塞发动机、涡轴发动机、涡桨发动机、涡喷发动机、涡扇发动机、微型电动机/内燃机/喷气发动机。值得特别指出的是,由于历史原因,目前多数无人机采用活塞发动机,虽然活塞发动机只适用于低速小型无人机,局限性较大;而推力变化范围大、耗油率低、高空性能好的涡扇发动机在无人机动力装置将占有重要地位。无人机发动机类型的选择不但与无人机要求的性能有关而且与当时的发动机技术水平、研制进度要求及用户的经济承受力等有关。但从无人机动力的装置选择情况来看,活塞式发动机适用于低谷、中低空的侦查、监视无人机及长航时无人机,飞机起飞质最较小一般为几百千克。所以目前仍得到广泛的采用。
凡是活塞式发动机都具有配气凸轮(轴),凸轮制造工艺复杂,要求精度高,在某种程度上,限制了活塞式发动机的使用性能和推广。
2.3 对于多旋翼无人机
多旋翼无人机有6种工作状态,分别为:垂直运动、俯仰运动、滚转运动、偏航运动、前后运动、侧向运动。
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。

图1 四旋翼飞行器的结构形式
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
通过对多旋翼无人机的研究,认为四个旋翼电机是处于各自独立的工作状态,问题是旋翼电机在旋翼上是固定的位置,旋桨全部处在同一举升水平上。电机四角对称中心的设计限制住了6个输出状态,改进旋桨将达到对于中心在增倍旋转的同时可以伸缩运动,采用这样的结构将使4个输入力控制6个飞行状态,变得更加灵活。
3 发明专利推介
3.1 本发明人获得专利
《新型精密滚动摩擦传动凸轮传动系统》,获得时间:2016年8月10日,专利号:ZL201620150868.4。
由于典型的凸轮传动,冲程量一般不可以调解,传动使用噪音大,振动大,传动磨损大,为了解决以上问题,本发明人对凸轮传动系统进行研究与开发,目的是要改进原有曲柄曲拐式凸轮传动为本项目内嵌偏心齿轮轴、外配内齿圈加滚动轴承的全新的传动方式。
3.2 核心技术及创新点
本设计为内外双层凸轮,往复行程可以从0~e1+e2,自由精确调节,调节范围大,精度高。(以精密齿轮制造精度可以达到±0.01mm)。
本凸轮传动系统可以从偏心距为0到2倍偏心齿轮轴的行程调节量,做到无极精密调节,并且实现了凸轮传动的连续的匀速滚动摩擦。从该技术的结构特点可以看出,本发明和传统的凸轮传动比较,有较大的传动原理上的突破,内外偏心齿轮传动的凸轮完全可以应用在更高速旋转的机械装置上采用。
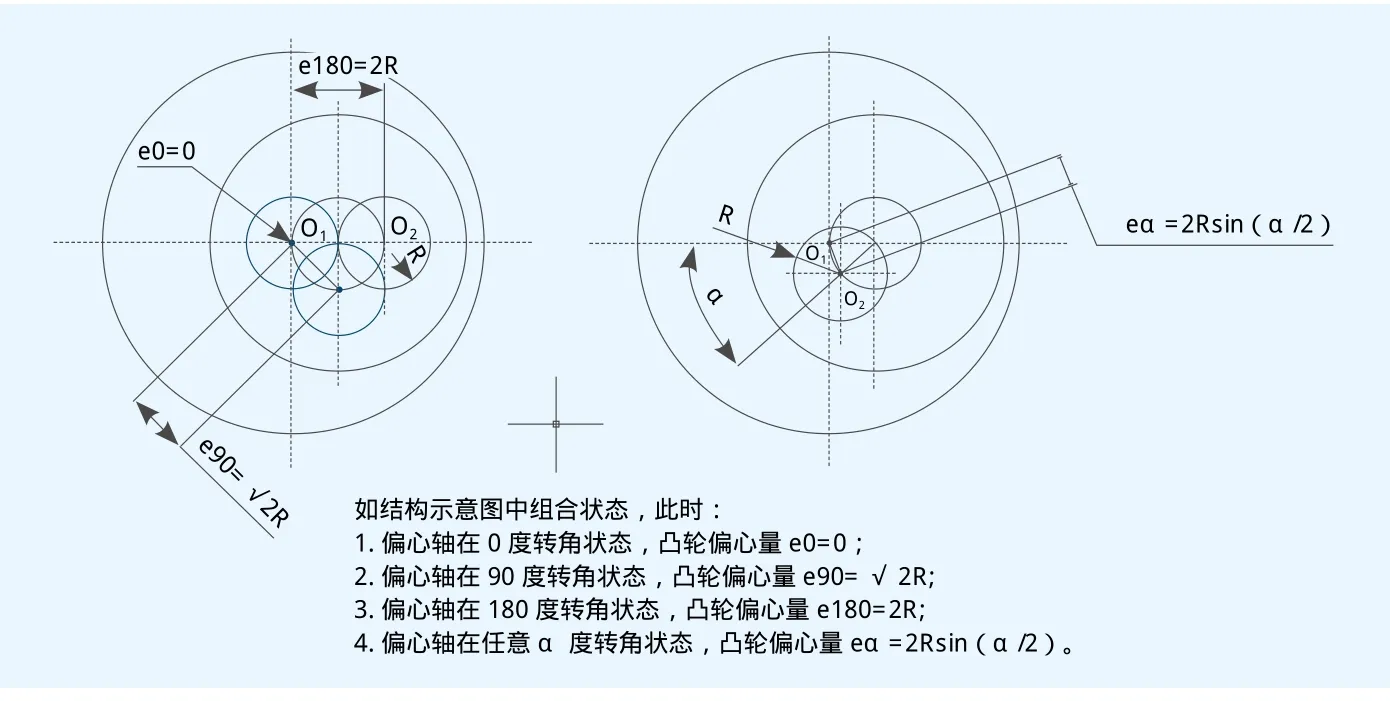
图2 内外凸轮组合求各转角状态下凸轮的偏心量调节示意图

3.3 凸轮专利的原理简介
本设计为内外双层凸轮,往复行程可以从0~e1+e2,自由精确调节,调节范围大,精度高。(以精密齿数制造精度可以达到±0.01mm)(偏心量调解 见图2《偏心量调节示意图》)。
该凸轮传动系统的主要原理为偏心外齿轮轴嵌入内齿圈,齿圈外圆镶嵌滚动轴承。偏心外齿轮轴嵌入内齿圈的初装角度,即决定了外齿圈的偏心量(外齿圈和滚动轴承为一体)。因此当偏心轴转动时外齿圈也同样绕着偏心轴转动,这样外齿圈就形成了一个可以滚动摩擦的传动凸轮。由于外凸轮为圆形,并且可以镶有滚动轴承;升降传动轴外嵌轴承,这样在相对传递中可以实现始终接触不脱离无冲击的滚动摩擦。
3.4 本专利发明的优点
(1)传动环节简单、为Ⅰ级传递、功率损失小、机械效率高。(2)传动系统各环节的在润滑和滚动摩擦状态下工作,传动噪声小。(3)节能、减噪、符合国家“节能减排”要求。(4)可以满足较高频率的试验要求。(5)调节往复行程方便、快捷,提高工作效率。(6)往复的行程可以达到精确调解。(7)体积小、重量轻。(8)具有在机械行业广泛推广价值。
4 认为本发明针对上述3方面的不足可以进行改善:
(1)无人机稳定平台的控制,由内外框架的两套控制子系统实现,均使用PWM控制直流电动机驱动,也就是说由回转运动要转变成导轮、导槽与凸轮的直线运动。CCD电视控制要求实测焦距输出精度在优于2%的条件下,凸轮传动误差精度为0.61°,如果采用《新型精密滚动摩擦传动凸轮传动系统》专利,可以实现凸轮的超精密加工(因为该凸轮为圆形);可以在一次凸轮设计制造中,获得N个调整角度和行程量。对于角度可以为 0 min ~ α max ;对于冲程可以由 0 min ~2e max(e为内外凸轮偏心量)进行无极调节,这样凸轮误差可以精准到1个齿的分度圆的精密角度(现在精密超小模数齿轮的加工技术已经相当成熟),通过应用此凸轮传动系统后,两轴四框架稳定平台结构的设计与控制更为合理,完全可以超过要求的误差精度,具有实用的意义和推广价值。
(2)本发明专利《新型精密滚动摩擦传动凸轮传动系统》从结构原理和制造工艺要求可以看出,完全适用于无人机活塞式发动机的配器气凸轮(轴)系统的精密复杂的凸轮设计和制造。如果采用本专利设计,可以使得配气凸轮(轴)的凸轮制造和角度、冲程调节变得更加精密、方便、体积变得更小;另外对于发动机的曲轴(曲拐凸轮)设计和制造也有一定的参考作用。
(3)从旋翼无人机的四个旋翼传动原理可以看出:旋翼的速度、角度和旋翼的举升位置决定了无人机的6个自由度的飞行状态。这种状态的动力来自于四台独立的电动机驱动。电动机驱动旋转翼的速度、角度和旋翼的举升位置即实现了无人机的启动动力和操控状态的控制。
本专利发明人经过工作实践,对于原专利进行了延伸设计,设计了铣刀凸轮进给系统。
经过对于旋翼无人机6种工作状态的粗浅认识,认为该专利的延伸设计完全可以应用到旋翼电机传动和旋转翼的速度、角度、举升位置的控制。四个旋翼电机是处于各自独立的工作状态,旋翼电机在旋翼上是固定的位置,旋桨全部处在同一举升水平上。电机四角对称中心的设计限制住了6个输出状态,改进旋桨将达到对于中心在增倍旋转的同时可以伸缩运动,采用这样的结构将使4个输入力控制6个飞行状态,变得更加灵活。
该设计原理如下:在原无级精密凸轮传动的基础上,扩大了使用范围的设计,该设计的基本结构是:凸轮传动系统(1),偏心凸轮的外圆环改为小模数齿圈,件号19为第一级传动齿轮,件号11为第二级传动齿轮,第一级第二级传动齿轮由两根固定轴和轮轴与轴承固定板件号5装配在一起,轮轴固定板5由件号6(四块定位导向滑板)夹持在机架8的配合滑道中。
其传动过程是:当偏心凸轮1在电机(四台电机分别带动一个凸轮轴)。电机的转速通过凸轮外齿圈(120齿;延伸设计图为驱动手轮13)传动给第一级齿轮(60齿),一级齿轮传递给二级齿轮(30齿),这样就实现了1:4的增速传动。
该系统由于固定一级二级齿轮轴的固定板5在传动中处于在机架上可以自由上下滑动状态(件号6),在导向滑板的控制下能够做到精密的上下直线运动。
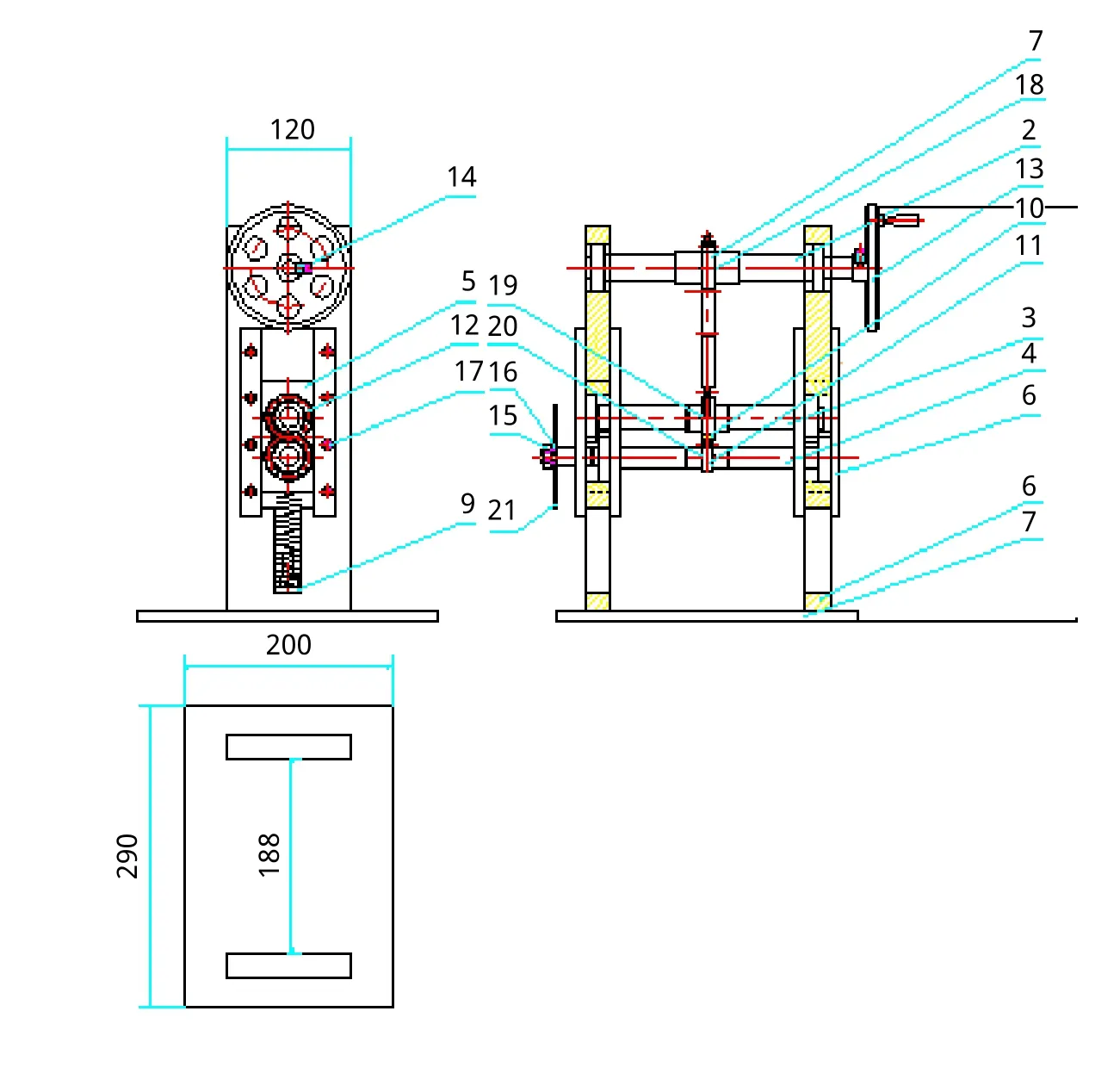
图3 铣刀凸轮进给系统传动原理演示器总装图
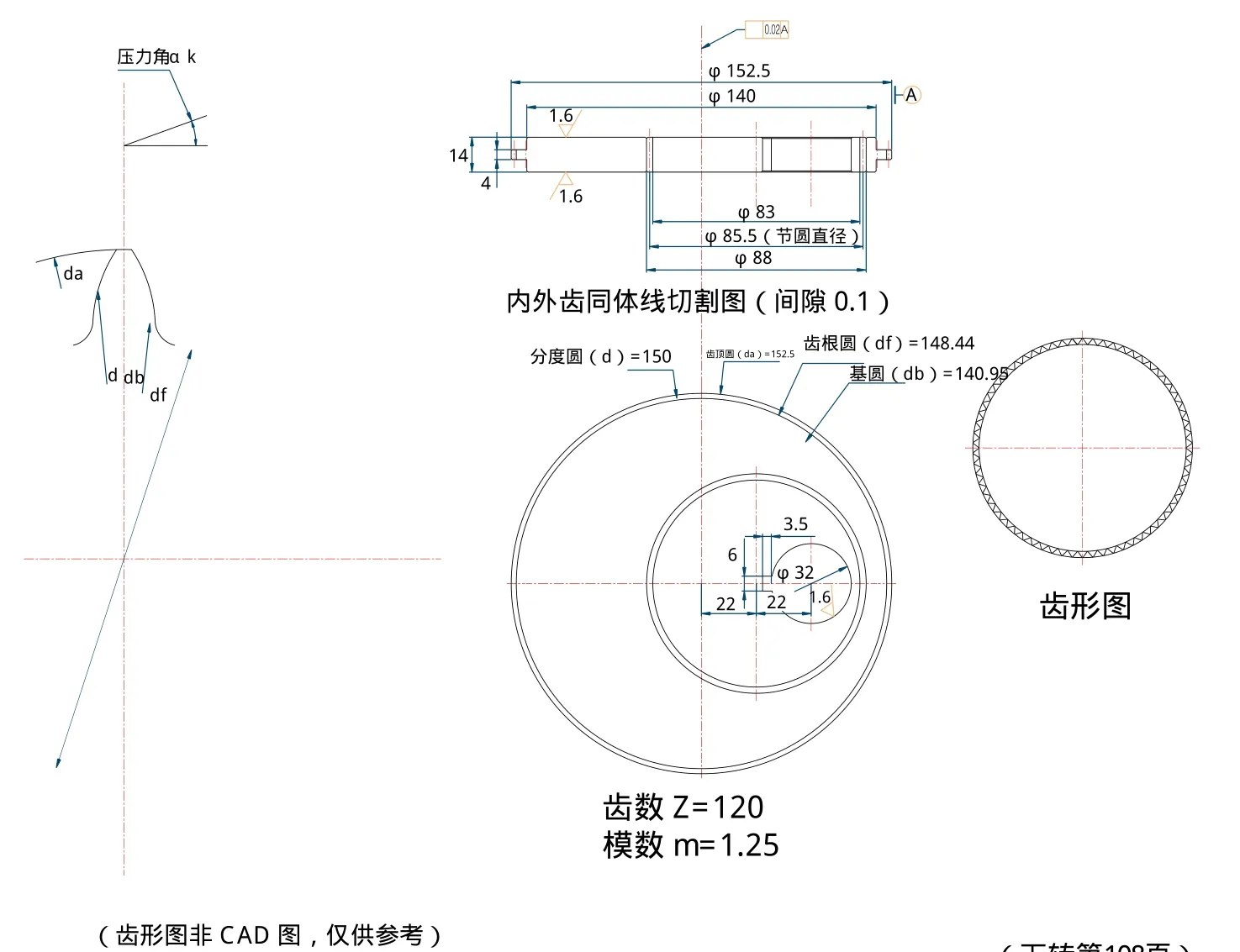
图4 齿形传动凸轮(铣刀进给系统)

图5 中间传动轴齿轮
为了使固定板5能够随着凸轮冲程的减少而上升,保证3个齿轮传动系的不脱离接触,在固定板下面设有支撑弹簧,件号9(弹簧座)。
在二级齿轮轴的一端设有螺旋翼(原设计为铣刀盘)。
专利的延伸设计使得凸轮和齿轮传动合理的结合在一起,实现了动力输出轴的转速增倍(本设计是1:4)
从该设计的结构图可以看出:旋翼电机经过凸轮齿轮1齿轮2实现了速度的倍增(4倍)和螺旋翼在旋翼端的举升位置可以由中心向外进行滑动,这样就实现了4个举升器对于中心的旋转位置是可以操控的。本发明人认为通过举升旋转翼4个相对位置的变化,有可能实现无人机的6个飞行状态的控制。附 铣刀凸轮进给系统(传动凸轮演示器)总装图、齿形传动凸轮、中间传动轴齿轮、铣刀进给传动轴齿轮和轴承支撑板。

图6 轴承支板
猜你喜欢
测井技术(2022年3期)2022-11-25
汽车实用技术(2022年7期)2022-04-20
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
汽车维修与保养(2020年11期)2020-06-09
绿色科技(2019年10期)2019-06-17
科技视界(2018年21期)2018-12-10
故事作文·高年级(2018年8期)2018-08-14
汽车实用技术(2018年14期)2018-08-09
快乐语文(2018年7期)2018-05-25