
双螺母预紧滚珠丝杠副摩擦力矩与接触刚度波动关系研究
2018-06-23 02:54汪远远黄金宝周长光冯虎田南京理工大学机械工程学院南京210094
振动与冲击 2018年11期
汪远远, 祖 莉, 黄金宝, 周长光, 欧 屹, 冯虎田(南京理工大学 机械工程学院, 南京 210094)
滚珠丝杠副广泛应用于数控机床进给系统[1-3],进给系统是各种数控设备的核心组成部分[4-5]。滚珠丝杠副刚性对数控机床进给系统动态稳定、振动幅度有重要影响[6-7]。随着滚珠丝杠副速度和载荷的不断提高,其振动问题愈加突出,严重影响数控机床的定位精度,滚珠丝杠副刚度不足问题已成为数控机床向高速化、高精度发展的主要障碍[8]。
目前对滚珠丝杠副刚性的研究大多集中在滚珠丝杠副静刚度的建模上,采用理论计算分析静刚度的影响因素或使用有限元仿真对所建模型的正确性进行验证,而通过刚性试验验证静刚度数学模型正确性的研究却很少。Takafuji等[9]以双螺母滚珠丝杠副为研究对象,考虑了丝杠轴、螺母、丝杠螺纹的弹性变形,建立新型滚珠丝杠副静刚度数学模型,并将静刚度数学模型计算值与试验值比较分析。陈勇将等[10-11]分析滚珠丝杠副刚度影响因素,考虑接触角的变化及接触变形影响,建立联合载荷下滚珠丝杠副刚度数学模型,并通过试验验证理论模型的可靠性。胡建忠等[12]考虑滚珠、螺母和丝杠滚道的几何参数,建立滚珠丝杠副接触角模型,发现预紧力对螺旋升角影响非常小, Wei等[13]以单螺母滚珠丝杠副为研究对象,在轴向载荷加载的过程中,接触角的变化很小,因此,在测量刚度的时候,螺旋升角和接触角对刚度的影响非常的小。另外目前在所有滚珠丝杠副的刚性试验研究过程中,仅仅只是针对滚珠丝杠副某一位置处检测其静刚度,并未考虑滚珠丝杠副不同位置处刚度值波动的情况。如果滚珠丝杠副在其有效行程内的刚度波动范围过大,那么必将对整个数控机床进给系统的动态稳定以及定位精度产生严重影响。因此,在研究滚珠丝杠副刚度时,必须考虑其不同位置处的刚度波动情况。
目前,境内外同一厂家不同规格、不同厂家同一规格的滚珠丝杠副螺母外形尺寸(螺母外径、法兰孔径、法兰孔距等)均不相同,因此在刚性测量过程中必须加工不同的工装,这就导致了大量资源浪费。另外,滚珠丝杠副刚性的一次测量只能测得一个位置的刚度值,如果要获得有效行程内的刚度波动情况,就必须进行多次测量,每次测量都要拆卸工装、调整传感器等一系列工作,这无疑大大增加了工作量。而滚珠丝杠副摩擦力矩的一次测量就可得到有效行程内摩擦力矩连续波动情况,更换丝杠时只需松开尾座、选择相应的连杆即可。由于滚珠丝杠副摩擦力矩测量是空载扭矩,在整个测量行程中,螺旋升角和接触角是基本没有什么变化,同时在刚性测量中,轴向载荷的加载对螺旋升角和接触角的影响非常小,可得双螺母预紧滚珠丝杠副摩擦力矩与刚度波动之间的关系,利用简单、易测的摩擦力矩变化趋势来表征滚珠丝杠副的刚度波动情况,评价滚珠丝杠副在有效行程内的动态稳定特性,本文首先对双螺母预紧滚珠丝杠副的滚珠进行动力学分析,建立预紧力与接触刚度的关系式,结合滚珠丝杠副预紧力与摩擦力矩平衡方程,建立关于摩擦力矩的接触刚度数学模型,最终通过试验验证理论分析的正确性。
1 双螺母预紧滚珠丝杠副接触刚度分析
双螺母预紧滚珠丝杠副仅受预紧力作用时,预紧力对称地施加在两螺母上,且同一滚道上所有滚珠受力情况相同[14]。为了便于分析,在两螺母上各取一个滚珠,建立滚珠丝杠副刚度模型,如图1所示。O,O′分别为两滚珠的球心,(X,Y,Z)为固定坐标系,Z轴与丝杠轴线所在的方向一致,A,C点为滚珠与螺母的接触点,B,D点为滚珠与丝杠的接触点,A′,B′,C′,D′分别为点A,B,C,D在YOZ平面上的投影。在O,O′处建立Frenet坐标系(tnb),t轴方向与螺旋线在O,O′点处的切线方向重合,n轴方向与丝杠在O,O′点径向方向重合。α表示滚珠与丝杠、螺母的接触角,β表示滚珠丝杠副的螺旋角。由图1中丝杠轴线方向受力平衡关系可得
(1)
式中:Q为接触点处滚珠受到的法向力;Fp为丝杠螺母的预紧力;i为滚珠丝杠副滚珠圈数;Z1为每圈滚珠中有效承载滚珠数;α为接触角;β为螺旋角。
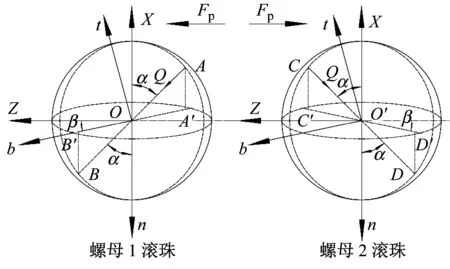
图1 双螺母预紧滚珠丝杠副在预紧力作用下的受力分析Fig.1 Mechanical analysis under preload of the double- nut preloaded ball screw mechanism
滚珠与丝杠滚道、螺母滚道间的法向接触变形,如图2所示。δs、δn分别为螺母1滚珠与丝杠滚道、滚珠与螺母滚道间的法向接触变形量。
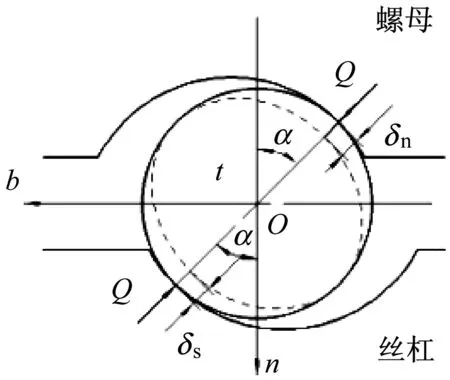
图2 滚珠与丝杠滚道、螺母滚道间的接触变形Fig.2 Normal contact deformation between the ball and the screw or the nut
在预紧力Fp的作用下,滚珠与丝杠滚道、滚珠与螺母滚道间产生的法向接触变形可由赫兹接触理论得

(2)

在预紧力Fp作用下,单螺母相对丝杠的轴向变形为δFp,滚珠与丝杠、滚珠与螺母间法向接触变形分别为δs、δn,由图2几何关系得
(3)
联立式(1)~式(3)可得单螺母相对丝杠的轴向变形为
(4)
式中:
Yj=1.282[-0.154(sinφ)1/4+1.348(sinφ)1/2-
0.194sinφ]
cosφj=


(5)
滚珠丝杠副预紧力与摩擦力矩之间的关系式为[16]
(6)
式中:μ为摩擦因数;rm为丝杠半径;rb为滚珠半径;Mtest为实际检测的摩擦力矩。
联立式(5)、式(6)得:
(7)
式中:λ=2μ·sinα·(rm+rb·cosα)·(cosβ)2。
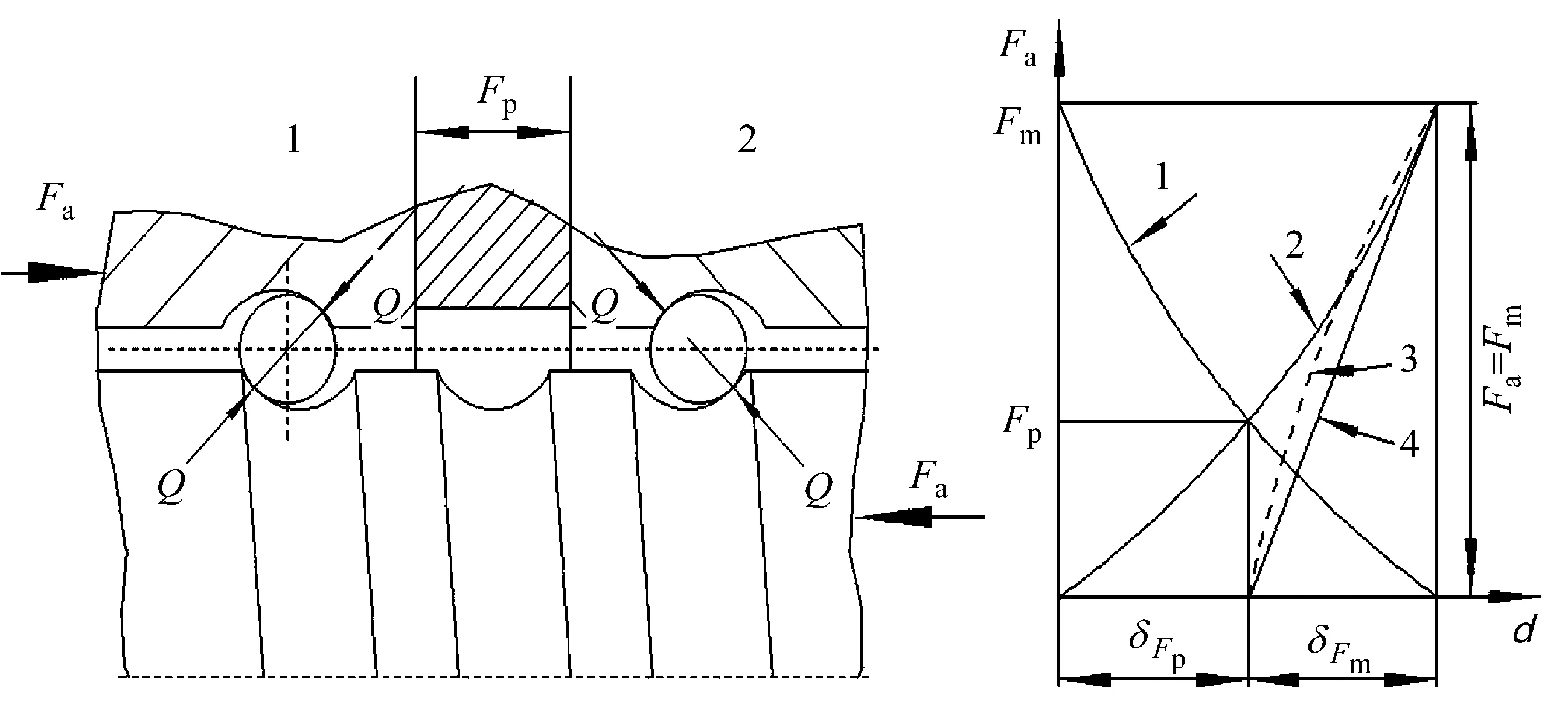
图3 双螺母预紧滚珠丝杠副在轴向负载下的轴向变形Fig.3 Axial deformation of the double-nut preloaded ball screw mechanism under the axial load
2 试验
本次试验选取境内外相同规格(境内厂家丝杠型号为DGD4010;境外厂家型号为R40-10k4-FDC)的双螺母预紧滚珠丝杠副各一根,具体参数,如表1所示。
2.1 滚珠丝杠副摩擦力矩测量原理
摩擦力矩测量原理,如图4所示。丝杠一端与伺服电机相连,另一端固定在尾座中心。螺母的圆周运动受到连杆①与悬臂②的约束,且工作台上设有支撑单元,支撑单元与丝杠滚道相接触,可以相对转动,没有顶死在丝杠滚道上,同时添加一定量润滑脂,作用只是当丝杠转动时,螺母和工作台可同时沿丝杠轴线方向往返运动,因此,可忽略其摩擦。滚珠与滚道间的摩擦力通过连杆传递给悬臂,悬臂下方的压力传感器③采集到的力值乘以力臂即为滚珠丝杠副摩擦力矩。试验前,使用100号润滑油[17]让丝杠跑合5 min,确保滚珠丝杠副充分润滑;试验过程中,丝杠以100 r/min的转速进行摩擦力矩测量。

表1 滚珠丝杠副参数表Tab.1 The ball screws parameters
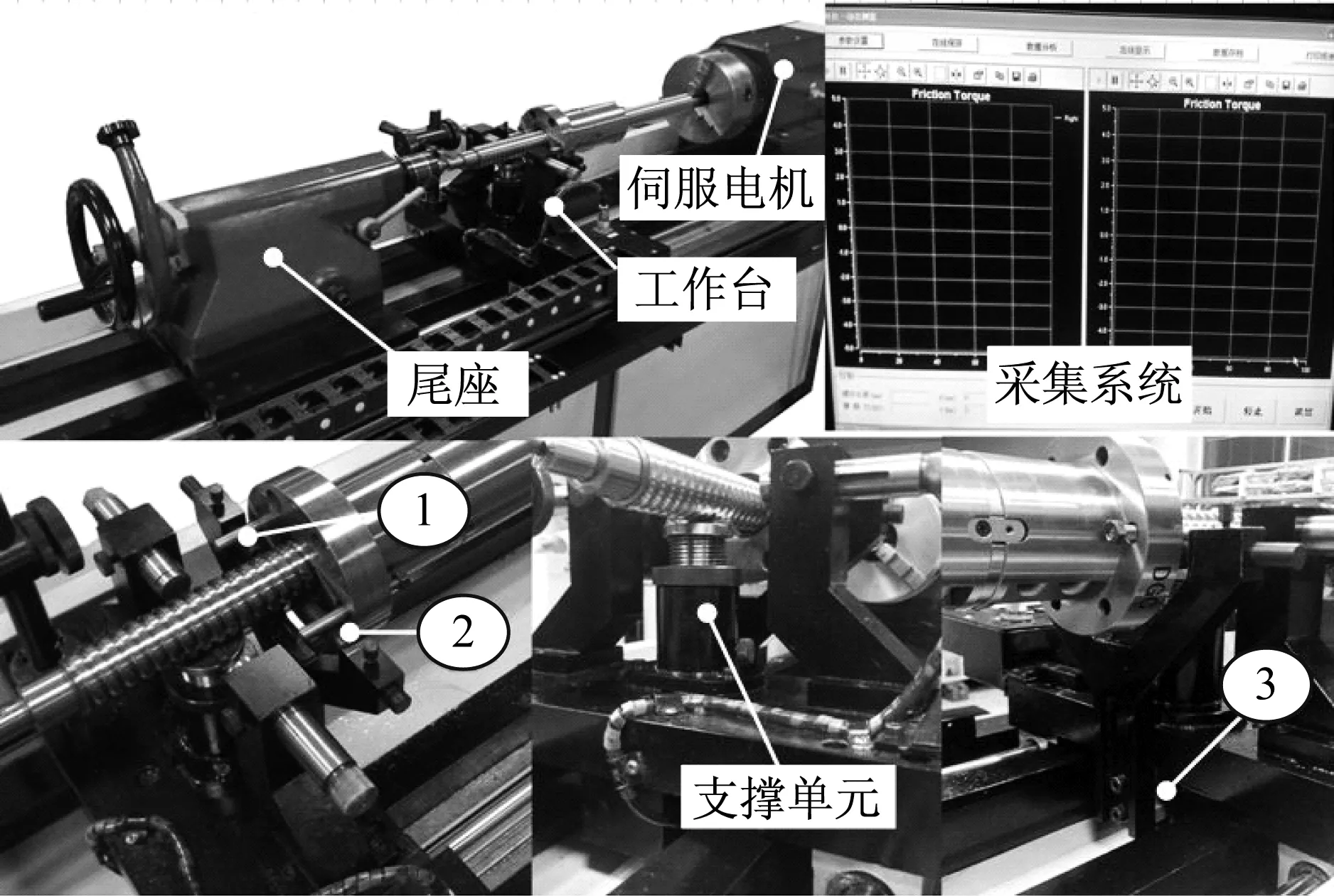
1-连杆; 2-悬臂; 3-压力传感器图4 摩擦力矩测量原理Fig.4 The measuring principle of friction torque
2.2 滚珠丝杠副静刚度测量原理
目前滚珠丝杠副静刚度测量有很多不足之处,如测量过程中丝杠发生旋转,位移传感器与丝杠轴线间距离不固定,每次测量中丝杠被测长度不确定,传感器不方便调节等[18]。针对上述滚珠丝杠副静刚度测量不足之处,为了减小间接测量带来的误差,对滚珠丝杠副静刚度测量系统进行优化,如图5所示。该测量系统主要由移动横梁、压力传感器、丝杠防转装置、刚度测量装置组成。

图5 滚珠丝杠副静刚度测量系统Fig.5 The static stiffness measuring system of the ball screws
针对滚珠丝杠副静刚度测量过程中丝杠发生旋转的现象,本文设计了丝杠防转装置结构,如图6所示。上压盘1与连杆4通过螺钉连接,连杆4与下压盘2中对应的孔相配合,丝杠5与下压盘2之间通过平键6连接,钢球3起到轴向负载Fa的传递作用。因此,当移动横梁缓慢加载时,通过连杆4与平键6的作用,可以防止丝杠发生旋转。

1-上压盘; 2-下压盘; 3-钢球; 4-连杆; 5-丝杠; 6-平键图6 滚珠丝杠副防转装置Fig.6 The anti-rotation device of the ball screws
针对目前滚珠丝杠副测量过程中,位移传感器与丝杠轴线间距离不固定,每次测量中丝杠被测长度不确定,传感器调节不方便等问题,根据滚珠丝杠副刚性测量原理,设计新型刚度测量装置,测量装置,如图7所示。该装置主要由弹性锥套2、丝杠测量基准3、螺母测量装置4、螺母固定装置6、传感器夹具7组成。接触式位移传感器8通过传感器夹具7垂直固定,位移传感器数量为3,120°均匀分布,且3个传感器分布在以丝杠轴线为中心的同一分度圆上,确保每个传感器距离丝杠轴线距离相等。弹性锥套2把丝杠测量基准3固定于丝杠上,确保位移传感器沿丝杠轴线方向不产生位移。螺母测量装置4通过连接件5固定于螺母上,丝杠螺母通过螺钉与螺母固定装置6连接,使螺母测量装置4固定不动。丝杠测量基准3与螺母测量装置4之间加等高块,保证每次静刚度试验中被检测的丝杠长度相等。
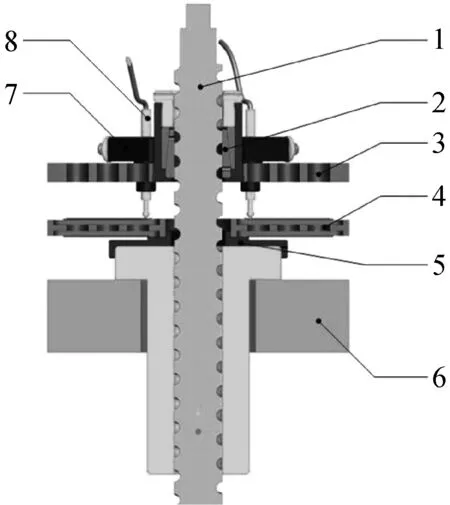
1-丝杠; 2-弹性锥套; 3-丝杠测量基准; 4-螺母测量装置; 5-连接件; 6-螺母固定装置; 7-传感器夹具; 8-位移传感器
图7 滚珠丝杠副刚度测量装置
Fig.7 The stiffness measuring device of ball screws

3 结果分析与讨论
根据BSISO3408-4,在计算轴向静刚度时,滚珠丝杠副是否有预载很重要,刚度计算公式适用于所有有预载的滚珠丝杠副。本次静刚度试验测量的是双螺母预紧滚珠丝杠副的综合刚度,它包括丝杠轴刚度、接触刚度及丝杠轴、螺母在外加负载径向分量作用下的刚度,它们之间的关系为
(8)
式中:Rcd为双螺母预紧滚珠丝杠副接触刚度,Rtest为综合刚度测量值,Rs为丝杠轴刚度,Rns为单螺母在外加负载径向分量作用下的刚度,Rs、Rns可根据BSISO3408-4计算,本文使用的两种型号滚珠丝杠副的Rs经计算皆为6 932 N/μm,型号为DGD4010、R4010K4FDC的滚珠丝杠副Rns经计算分别为17 800 N/μm、13 150 N/μm),根据该关系式可求出接触刚度测量值。
两种型号的双螺母预紧滚珠丝杠副摩擦力矩测量值,如图8所示。从图8可知,型号为DGD4010的滚珠丝杠副摩擦力矩值波动范围为1.42~2.16 N/m;型号为R4010K4FDC的滚珠丝杠副的摩擦力矩波动范围为1.08~1.33 N/m。图9为式(7)所得的接触刚度理论值与接触刚度测量值对比。型号为DGD4010的滚珠丝杠副的理论接触刚度波动范围为1 451~1 669 N/μm,实测接触刚度波动范围为1 437~1 567 N/μm;型号为R4010K4FDC的滚珠丝杠副的理论接触刚度波动范围为1 324~1 418 N/μm,实测接触刚度波动范围为1 318~1 406 N/μm,滚珠丝杠副接触刚度测量值曲线与理论值曲线基本吻合,充分验证了所建接触刚度数学模型的正确性,因此可通过测量双螺母预紧滚珠丝杠副的摩擦力矩来反映其有效行程内的刚度波动情况。
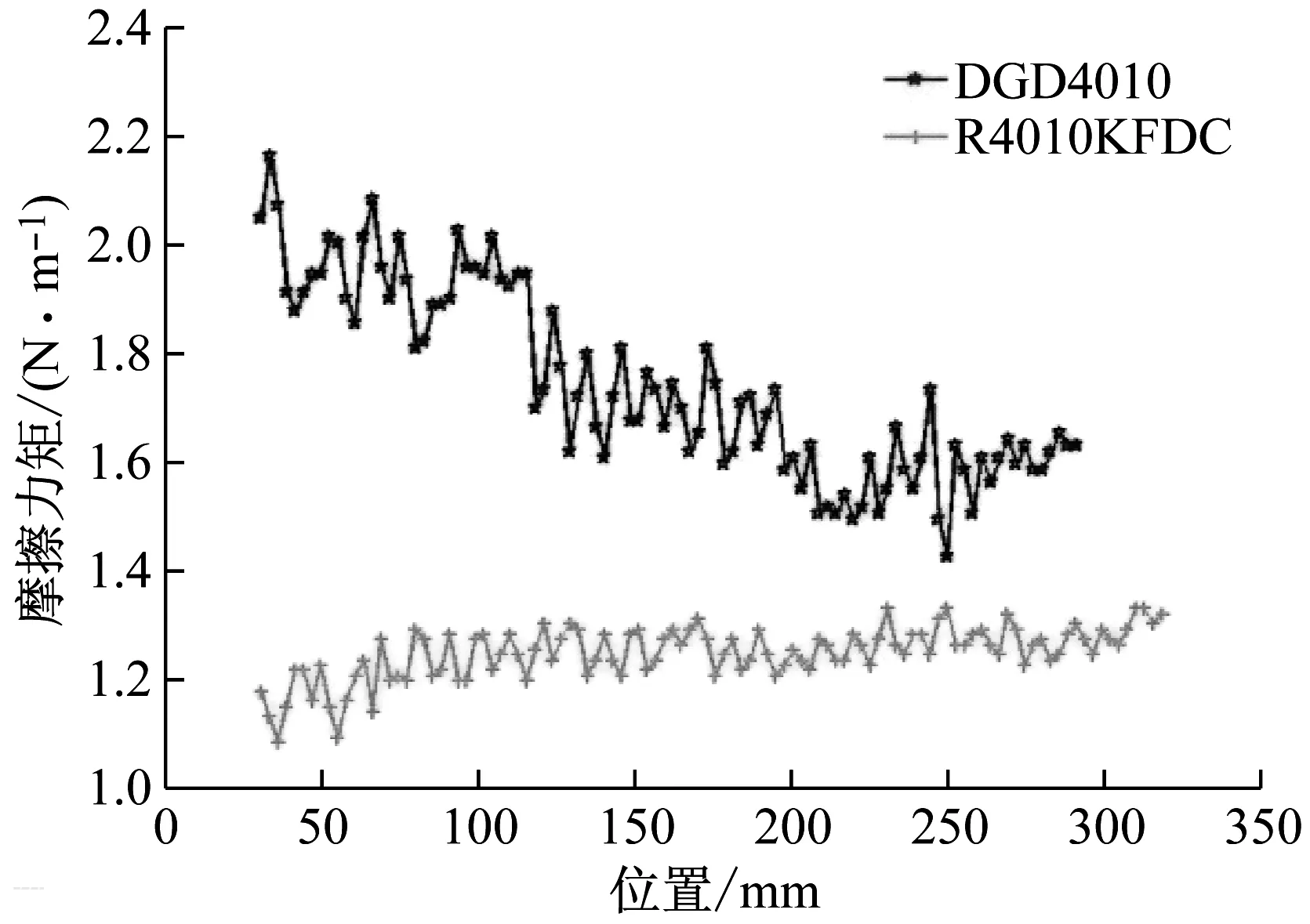
图8 双螺母预紧滚珠丝杠副摩擦力矩测量值Fig.8 Test values of friction torque of the double-nut preloaded ball screw mechanism
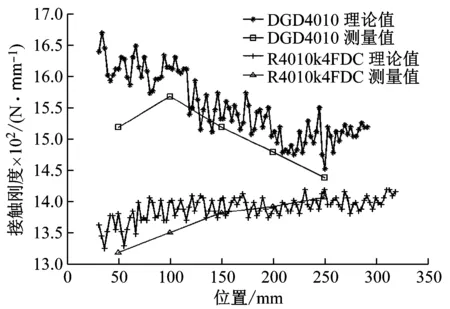
图9 双螺母预紧滚珠丝杠副接触刚度理论值与测量值Fig.9 Calculated and measured values of contact stiffness of the double-nut preloaded ball screw mechanism
需要说明的是,型号为DGD4010的滚珠丝杠副的第1个测量点处接触刚度测量值比第二个测量点处接触刚度测量值低,而从理论曲线的变化趋势来看,第一测量点处的接触刚度理论值比第二测量点处的接触刚度理论值高,如图9所示。在接触刚度测量中,型号为DGD4010的滚珠丝杠副的第1个测量点处5次测量值重复性好,且对5次测量值取均值,测量结果真实可靠。可能是由于该双螺母预紧滚珠丝杠副(DGD4010)的第1个测量点处的导程误差或材料等原因,导致此处的滚珠产生的轴向变形较大,使得螺母的整体轴向变形增大,最终使得该点的接触刚度较低。
4 结 论
本文通过对双螺母预紧滚珠丝杠副滚珠进行动力学分析,建立预紧力与接触刚度的关系式,结合滚珠丝杠副预紧力与摩擦力矩平衡方程,建立双螺母预紧滚珠丝杠副关于摩擦力矩的接触刚度模型,最终通过试验验证了接触刚度数学模型的正确性。试验结果表明:
(1) 当双螺母预紧滚珠丝杠副的轴向外加载荷<23/2倍预紧力时,双螺母预紧滚珠丝杠副的接触刚度与摩擦力矩的三分之一次方成正比。
(2) 可通过测量双螺母预紧滚珠丝杠副的摩擦力矩来反映其有效行程内的刚度波动情况。
(3) 可简单、快速的获得双螺母预紧滚珠丝杠副接触刚度波动情况,能够快速的进行双螺母预紧滚珠丝杠副的初步筛选。
参 考 文 献
[1] XU Z Z, LIU X J, KIM H K, et al. Thermal error forecast and performance evaluation for an air-cooling ball screw system[J]. International Journal of Machine Tools and Manufacture, 2011, 51(7/8): 605-611.
[2] WEI C C, LAI R S. Kinematical analyses and transmission efficiency of a preloaded ball operating at high rotational speeds[J]. Mechanism and Machine Theory, 2011, 46(7):880-898.
[3] 姜洪奎, 宋现春, 李保民,等. 基于滚珠丝杠副流畅性的滚珠返向器型线优化设计[J]. 振动与冲击, 2012, 31(2):38-42.
JIANG Hongkui, SONG Xianchun, LI Baomin, et al. Optimal design of passage profile of a ball returner based on fluency of a ball screw mechanism[J]. Journal of Vibration and Shock, 2012, 31(2):38-42.
[4] 王永强, 张承瑞. 滚珠丝杠进给系统仿真建模[J]. 振动与冲击, 2013, 32(3):46-49.
WANG Yongqiang,ZHANG Chengrui. Modeling modeling of ball screw feed system[J]. Journal of Vibration and Shock, 2013, 32 (3): 46-49.
[5] 吴子英, 刘宏昭, 王胜,等. 数控机床进给伺服系统研究进展[J]. 振动与冲击, 2014, 33(8):148-155.
WU Ziying,LIU Hongzhao,WANG Sheng,et al. Advances in feeding servo ystem of CNC machine tool[J]. Journal of Vibration and Shock, 2014, 33 (8): 148-155.
[6] FENG G H,PAN Y L.Investigation of ball screw preload variation based on dynamic modeling of a preload adjustable feed-drive system and spectrum analysis of ball-nuts sensed vibration signals[J]. International Journal of Machine Tools & Manufacture, 2012, 52(1):85-96.
[7] 王民, 李凤蛟, 昝涛,等. 基于多重调谐质量阻尼器的滚珠丝杠副横向振动控制[J]. 振动与冲击, 2015,34(10):63-67.
WANG Min, LI Fengjiao, ZAN Tao, et al. Transverse vibration control of ball screw based on multi-tuned mass damper[J]. Journal of Vibration and Shock, 2015, 34(10): 63-67.
[8] 朱坚民, 张统超, 王健,等. 数控机床进给单元滚动结合部轴向动态特性参数识别[J]. 振动与冲击, 2015, 34(16):1-7.
ZHU Jianmin, ZHANG Tongchao, WANG Jian, et al.Characteristics of axial dynamic characteristic parameter identification of rolling bonding unit of CNC machine tool feeding unit[J]. Journal of Vibration and Shock, 2015, 34 (16): 1-7.
[9] TAKAFUJI K, NAKASHIMA K. Stiffness of a ball screw with consideration of deformation of the screw, nut and screw thread[J].JSME International Journal, 1990,33(4):620-626.
[10] 陈勇将,汤文成,王洁璐. 滚珠丝杠副刚度影响因素及试验研究[J]. 振动与冲击,2013,32(11):70-74.
CHEN Yongjiang, TANG Wencheng, WANG Jielu. Influence factors on stiffness of a ball screw[J]. Journal of Vibration and Shock, 2013, 32(11):70-74.
[11] 黄露郎, 王科社, 查初亮. 滚珠丝杠副轴向静刚度的建模与研究[J]. 组合机床与自动化加工技术, 2015(8):39-42.
HUANG Lulang, WANG Keshe, ZHA Chuliang.Study and research on axial static stiffness of ball screw[J]. Modular Machine Tool and Automac Manufacturing Technique, 2015 (8): 39-42.
[12] 胡建忠,王民,高相胜,等.双螺母定位预紧滚珠丝杠副轴向接触刚度分析[J].机械工程学报,2014,50(7):60-69.
HU Jianzhong, WANG Min, GAO Xiangsheng, et al. Axial contact stiffness analysis of position preload ball screw mechanism[J]. Journal of Mechanical Engineering, 2014, 50(7):60-69.
[13] WEI C C, LAI R S. Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds[J]. Mechanism & Machine Theory, 2011, 46(7):880-898.
[14] WEI C C, LIN J F, HORNG J H. Analysis of a ball screw with a preload and lubrication[J]. Tribology International 2009, 42; 1816-1831.
[15] Static axial rigidity:BS ISO 3408-4[S]. 2006.
[16] ZHOU C G, FENG H T, CHEN Z T, et al. Correlation between preload and no-load drag torque of ball screws[J]. International Journal of Machine Tools & Manufacture, 2016, 102: 35-40.
[17] Acceptance conditions and acceptance tests:BS ISO 3408-3[S]. 2006.
[18] 周福兴, 王禹林, 韩军,等. 滚珠丝杠副刚性试验台加载及测量系统工装设计[J]. 组合机床与自动化加工技术, 2016(4):113-116.
ZHOU Fuxing, WANG Yulin, HAN Jun, et al. Test rigid ball screw loading station tooling design and measurement system[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2016(4): 113-116.
猜你喜欢
南方农机(2022年10期)2022-05-14
思维与智慧·上半月(2020年4期)2020-04-13
制造技术与机床(2019年11期)2019-12-04
发明与创新·小学生(2019年8期)2019-08-27
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年2期)2017-05-04
创新科技(2014年10期)2014-07-27
中国重型装备(2013年1期)2013-11-18
