
高速铁路接触网悬挂装置开口销不良状态检测方法研究
2018-06-30 06:46钟俊平刘志刚陈隽文韩志伟
铁道学报 2018年6期
钟俊平,刘志刚,陈隽文,韩志伟
(西南交通大学 电气工程学院,四川 成都 610031)
为确保高速铁路动车组运营秩序,提高其供电安全性、可靠性,满足高速铁路快速发展和运营品质的需求,构建了高速铁路供电安全检测监测系统(6C系统),而利用非接触式检测设备对接触网悬挂系统零部件状态检测是其中重要的组成部分[1]。
开口销在悬挂装置中起固定和防护作用。由于长期运行过程中的振动疲劳或施工缺陷,使其产生脱落或开口角度不足等不良状态[2],需及时采取措施对其检测并进行安全隐患的排除。目前,基于图像处理技术的检测方法是接触网故障检测领域的发展趋势,它克服了传统人工检测中工作量大、效率低、故障判断相对滞后等困难。文献[3]阐述了非接触式图像检测研究的最新进展和存在的不足,并指出接触网销钉缺陷问题亟待解决。文献[4]基于快速鲁棒性特征算法和灰度极小值分布规律对绝缘子不良状态进行检测。文献[5]研究了结合形态学处理和Hough变换的受电弓滑板磨耗测量。文献[6]采用基于SIFT(尺度不变特征变换)理论的特征点匹配算法定位双耳和对比边缘曲率检测耳片断裂。文献[7]采用基于Harris角点与谱聚类实现了绝缘子的抗旋转匹配和故障检测。文献[8]将Adaboost算法用于确定接触网系统支柱特征,进而实现定位器目标的识别。
目前接触网零部件定位方法的不足主要表现在Adaboost等分类器定位法的实质是将整幅图像有重叠抽样成数量较大的样本,然后与标准部件匹配,实时性较差。由于开口销在整幅接触网支撑装置图像中微小、分布较为分散且以耳片等相似灰度值的零部件为背景,检测其缺失、开口角度不足等不良状态存在较大困难,目前还未有相关研究报道,图1标识了腕臂支撑上主要的开口销分布。

图1 腕臂支撑上的开口销分布
本文针对图1中分布在腕臂支撑的6处开口销不良状态检测的处理流程如图2所示,不同位置开口销处理过程见表1。表1中L1、L2和D1、D2分别对应于图2中标识的定位和检测过程。
L1:利用Hough线检测、边缘检测得到斜腕臂上、下边缘,并提取其斜率曲线特征,得到双耳连接处、短斜撑上端连接处(含短斜撑)和斜撑下端连接处的局部图,如图1中方框所示。利用PBoW(Pyramid Bag of Word)模型实现初定位图片的识别分类。
L2:利用SIFT(Scale Invariant Feature Transform)算法实现开口销的定位。
D1:针对双耳下方销钉,利用其两端灰度分布规律实现其不良状态检测。
D2:针对以耳片为背景的开口销,提取初定位后图片中的连接处螺钉的圆形特征,分割出其外围开口销所在的圆环区域,并根据圆环内连通区域分布规律判断开口销的状态。

图2 检测处理流程

开口销123456定位过程L1L1L1L1L2L2检测过程D2D2—D1—D2
1 斜腕连接处开口销的初步定位
1.1 斜腕连接处区域的确定
分析接触网支撑及悬挂装置图像,可得出几个重要特征:一是腕臂、斜撑等杆状部分的边缘呈现明显的线段特征,虽然受不同空间位置曝光程度差异的影响,整条边缘并非呈现完整的线段,但局部线段特征明显;二是斜腕臂具有特定的倾斜角度,且与其他杆状物倾角差异明显;三是斜腕连接处的定位环单耳与斜腕臂呈垂直安装状态,如图3所示。

图3 定位环单耳与斜腕的位置关系
基于以上特点,可利用Hough直线检测[9]、提取边缘曲率特征方法实现斜腕连接处目标的定位。首先对支撑装置含短斜撑情况进行处理。
对图4中图像进行Hough变换,结果如图5所示,标度轴θ和ρ分别表示直线与竖直方向夹角和与原点的距离。提取所得Hough矩阵中前10个峰值点。由于斜腕对应的θ值范围一般为45°~60°,因此可取该角度区间中θ和ρ都相近的一对峰值点,作为一根斜腕的两侧边缘直线。按此要求处理图5,得到红色框标注一对峰值点,其对应于图4中斜腕的两侧绿色边缘直线(共线的线段算一条)。

图4 斜腕臂处的Hough线检测结果

图5 Hough矩阵提取前10个峰值
设红框内点的ρ值分别为ρ1、ρ2,图4中斜腕的粗细分别为w,则有
w=|ρ1-ρ2|
( 1 )
根据已检测到斜腕两侧的直线,可确定斜腕的中轴线,将中轴线沿垂直斜腕方向分别向上、下平移0.8w,得到图4中斜腕两侧红色线所围区域。该区域再经二值化、连通域筛选处理,得到图6所示的检测区域。

图6 斜腕臂检测区域
对图6中的连通域检测边界,并进一步筛选出图中红色线所示的上、下边界,对上边界自左下到右上,对下边界自右上到左下,均以10个像素为距离计算斜率,所得结果如图7、图8蓝色曲线所示。

图7 斜腕臂上边界的斜率曲线

图8 斜腕臂下边界的斜率曲线
由图7、图8可以看出,边界非凸起处的斜率基本为定值;单耳垂直凸起处两侧斜率和与斜腕垂直的斜率接近,满足该要求的两侧点集数量均大于10,且两个点集的距离一般大于50个像素。
目标区域粗定位的标定点(图6中绿色点)确定步骤如下:
步骤1由斜腕的斜率为k1,可知与斜腕垂直直线的斜率为k2=-1/k1,如图7、图8中红线所示。
步骤2筛选下边界连接处(垂直凸起)两侧区域内分布点,设单个连接处的两侧候选点集分别为X和Y,它们满足条件
( 2 )
式中:k为候选点集斜率;Δ取0.1;N(X)和N(Y)分别表示两侧点集数目;|D(X)-D(Y)|为两个点集在杆上的位置距离。式( 2 )中的Δ和相关阈值均为经过大量实验的经验值。
步骤3取满足式( 2 )条件的X、Y点集中位置距离最近的两个点,如图6中位于凸起处蓝色点所示。
步骤4由步骤3中蓝色点和斜率k2可得两条直线,它们与斜腕中轴线相交,取交点的中点即为所求绿色点。
由斜腕臂分布大小,可估计出双耳连接处大小尺寸。在斜腕臂上侧以绿色点为右下原点截取2w×4w局部子图并逆时针旋转至水平,斜腕臂下侧以绿色点为左上原点截取4w×2w局部子图。将三类图像均缩放至128×64大小,便于后续的识别分类处理。所得斜腕连接处开口销的初定位结果如图9所示。上述方法能够较精确提取斜腕臂连接件。
对于不含短斜撑情况下的定位,可利用上述方法作相同处理,其所得定位图仅为图9(a)和图9(c)两种位置的连接处,能够取得良好的效果,此处不再赘述。

(a)斜撑下端连接处

(b)短斜撑上端连接处

(c)双耳连接处图9 斜腕臂三种连接处定位图
1.2 基于PBoW模型的初定位目标识别
1.2.1 PBoW模型基础
词袋模型,即BoW(Bag of Word)模型,源于自然语言处理和信息检索。文献[10]将其引入图像场景分类中,在目标识别、图像分类等领域得到广泛应用[11-12]。常规BoW模型实现分类的过程包括图像特征的提取与描述、视觉词典的构造、基于视觉词典直方图的图像表示和分类器分类。该词袋模型在图像表示阶段直接统计整幅图像上各单词出现的频次,未考虑图像上局部特征之间的空间位置信息,而这种局部特征之间的空间排列关系对于提高图像表示性能非常重要,为此文献[13]引入空间金字塔匹配原理,提出PBoW模型,即空间金字塔词袋模型,并取得较好的分类性能。
初定位图片中斜撑下端连接处、短斜撑上端连接处和双耳连接处的形态相对固定,在空间分布上差异明显,因此采用PBoW模型对其进行识别分类,如图10所示。

图10 PBoW模型对斜腕连接处图片分类
结合图10,PBoW模型训练过程步骤如下:
步骤1图像特征的提取与描述。对大量经等比例缩放为128×64像素大小的两种初定位图像进行正方形滑动窗密集采样。窗宽l=16,滑动间隔Δ=8。每个窗包含4个8×8的单元格,计算每个单元格9个方向的梯度直方图,形成4×9=36维的HOG特征向量。如图11所示。
本文选择HOG特征[14]而非传统BoW模型中常用的SIFT特征是基于以下几点考虑:
(1)HOG特征不考虑物体的旋转和尺度变化,相比每个SIFT特征都需要128维向量描述,计算量小。
(2)目标图像都经等比例缩放至同一尺寸大小,因此可忽略尺度不同的问题。
(3)定位得到的目标方向位置变化不大,可认为具有旋转不变性。

图11 一个滑动窗内的HOG特征描述
步骤2视觉词典的生成。利用K-means聚类法[15]将步骤1中所提取的滑动窗HOG特征向量聚为n类,n即为词典中单词数目,设置为50。每个聚类的中心向量表示一个单词。
步骤3两层PBoW图像的表示。将训练图像集化为两层金字塔图像,逐层对图像各块区域按步骤1中采样过程,生成HOG特征向量,将其归属为词典中与其欧式距离最小的单词。可得两层图像各区域单词出现的频次直方图向量Hi,j,它对应第i层图像第j块区域,是一个50维向量。将两层图像的Hi,j连接起来,生成二次特征H。
H=[H0,1H1,1H1,2H1,3H1,4]
( 3 )
步骤4利用H训练SVM分类器,得到分类模型。
PBoW模型测试过程是将测试图像重复训练中的步骤3过程,生成二次特征并输入训练好的SVM,完成识别分类。
1.2.2 基于PBoW模型识别的实验分析
将斜撑下端连接处、短斜撑上端连接处和双耳连接处初定位图像各200张、150张和150张,分别用于词典生成、SVM训练和测试,实验结果见表2。

表2 PBoW识别实验结果
由表2可知,PBoW的总体正确识别率较高,均接近100%。出现的个别误识别情况,是极少数样品的倾斜程度与其他类别接近,或者是摄像机拍摄角度的因素所致。
2 SIFT算法对开口销5和6的初定位
针对较分散的开口销5和6初定位,本文采用SIFT[16]算法。不仅对图像缩放、平移和旋转变换具有不变性,而且对光照变化以及仿射和投影变换具有部分不变性,在模式识别、图像配准等领域已有广泛的应用。
为避免开口销2与6、开口销3与5的相似性干扰,以及减少误匹配,提高检测效率,去除斜腕和已定位连接处,采用SIFT算法提取局部特征点进行匹配。开口销5和6的匹配结果如图12所示。

(a)开口销5连接处匹配

(b)开口销6连接处匹配图12 开口销5和6连接处匹配结果
将匹配成功的特征点进行聚类,如图12所示。再使用改进的RANSAC算法[17]进行处理,对每一个聚类去除误匹配。图像的仿射变换可描述为
( 4 )
式中:m1、m2、m4和m5为图像的旋转和缩放因子;[m3m6]T为平移矢量;T为仿射矩阵;I(x,y)和I′(x′,y′)分别为样本模板和目标图像的匹配点。

( 5 )
由估计出仿射矩阵参数,将样本顶角和底角坐标代入式( 4 ),最终实现目标双耳的定位与提取,结果如图13所示。

(a)开口销5的初结果定位

(b)开口销6的初结果定位图13 开口销5和6的初定位结果
对于不含短斜撑情况下的定位,图像结构更加简单,可利用上述方法作相同处理,此处不再赘述。
3 开口销二次定位和状态检测
3.1 耳片下方开口销的二次定位与检测
对初定位双耳连接处进行直线检测,可得套筒两侧直线及其倾角,将双耳旋转至水平并按图14(b)分割实现开口销4的二次定位。3种状态销钉经边缘检测如图14(c)~图14(e)所示。

(a) (b)

(c) (d) (e)图14 开口销4的二次定位及检测过程
观察销钉3种状态的d1、d2情况,可制定销钉工作状态的检测规则为
f=
( 6 )
式( 6 )中销轴宽度d放置在分母,作用是消除图像不同尺度的影响。经多次实验分析,式( 6 )中T1取0.1,T2取0.3。
3.2 部件表面开口销的二次定位与检测3.2.1 部件表面开口销的二次定位
本文基于连接处螺钉的圆特征,采用文献[18]中的Hough圆检测法确定该螺钉的圆心坐标与半径,该方法对不规则圆也能实现准确检测。利用所得圆心坐标和半径分割出开口销所在圆环部分,实现开口销二次定位。位于部件表面5处开口销的二次定位过程如图15所示。

(a)开口销1的二次定位

(b)开口销2的二次定位

(c)开口销3的二次定位

(d)开口销5的二次定位

(e)开口销6的二次定位图15 部件表面开口销的二次定位
5种表面开口销二次定位基本过程相同,主要步骤如下:
步骤1图15首列为原图,针对开口销小、暗和弱的特点,为突出边缘信息且不引入畸变,采用对比度拉伸增强图像。
步骤2计算增强后图像的梯度值,并得到投票累加矩阵如图15第二列所示,提取极大值点(针对图15(a)情况,为排除套筒两处螺钉干扰,在左半平面提取极大值),确定螺钉的圆心坐标。
步骤3设定Hough圆检测的搜索半径范围[18]。由于部件尺寸能粗略估计,搜索半径最大值rmax和最小值rmin也可基本确定,本文将rmax和rmin分别设为20和10。结合所得圆心位置坐标,可以检测到螺钉底面和部分侧面作为一个整体的圆,其半径大小为r,结果如图15第三列所示。
步骤4在原初定位图像中分割出内环半径为r,外环半径为2r的圆环区域开口销局部特征,如图15第四列所示。
根据以上步骤,将螺钉底面和部分侧面作为整体圆检测出,精确实现开口销的二次定位。
3.2.2 部件表面开口销的状态检测
(1)针对开口销1、2和6的脱落故障和未出现严重松脱时开口角度不足状态的检测,处理过程如图16所示。

(a)

(b)

(c)

(d)图16 表面开口销状态检测处理过程
图16中从左至右每列分别对应开口销正常状态、脱落故障、开口角度严重不足状态经过处理的过程。图16(a)为销钉区域的原图,由于部件材质颜色和污垢的影响,使销钉部分和背景的差异不明显,因此采用Retinex法[19]进行图像增强,能够较好保持边缘信息,得到图16(b)。采用性能优良的Canny算子对增强后的图像进行边缘检测,得到如图16(c)所示结果。闭运算能平滑对象轮廓,将缺口连接成细长的弯口,图16(c)经闭运算处理,能够将独立的线段变为连通域边界,再填充像素和小于Z的联通域得到图16(d)结果。其中Z为25,是根据大量实验后的经验取值,它可能使销钉尾的张角区域被填充,但由于Z取值偏小,此时开口销可认为是张角严重不足状态。
设S为图16(d)中圆环面积,S1,S2,…,Sk为圆环内非连通域面积且大小依次递减,其中k为圆环内非连通域数目,可制定如下状态判据:
①若k=1,S1/S≥0.98,为脱落状态;
②若k=1,S1/S≤0.9,为疑似松脱状态;
③若k=2,S1/S≥0.38,S2/S≥0.38,为开口角度严重不足状态;
④若k=3,S1/S≥0.35,S2/S≥0.35,为正常状态。
以上判据中阈值数据均为经验取值,能够较准确地判断开口销缺失故障。在对张角不足的样本进行检测时,由于销钉尾端张角区域被填充为一块连通区域,因此判据能对开口角度不足状态进行检测,但对张角不足的程度无法作精确区分,且对开口销松脱状态只能作疑似判断。
(2)开口销3和5在连接处的整体分布情况相对复杂,检测受到螺钉的遮挡干扰。如图17所示。本文能够对这两处位置销钉作准确定位,但对其状态的检测难度较大,很难制定相应的不良状态检测判据。

图17 开口销3和5的样本
4 检测实验
利用状态判据对开口销1、2和6各120张图片进行处理,每种包含销钉正常、张角不足和脱落状态图片各40张,检测结果见表3~表5。

表3 开口销1状态检测实验数据

表4 开口销2状态检测实验数据
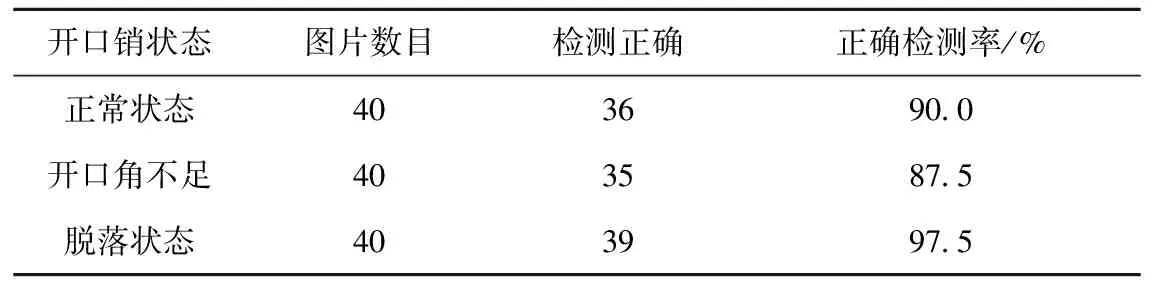
表5 开口销6状态检测实验数据
分析表3~表5的检测数据,开口销脱落故障基本被全部正确检测,这与其突出的特征有关。正常和张角不足状态的正确检测率均在85%以上,针对其中少数销钉被误检测的情况,其原因是部件中污垢过多,导致销钉与耳片背景较难区分,图片中包含的开口销边缘等重要信息丢失,如图18所示。

(a) (b)图18 开口销误检测示例
利用状态判据对开口销4类120张图片进行处理,每种包含销钉正常、松脱和脱落状态图片各40张,检测结果见表6。

表6 开口销4状态检测实验数据
分析表6可知,开口销4正确检测率达到90%以上,脱落状态正确检测率高达95%。通过销钉灰度分布规律特征提取,能够判断出绝大部分开口销4的状态。
5 结束语
本文基于数字图像处理技术,利用Hough变换直线检测和斜腕边缘连接处的线特征实现斜腕臂上连接处的定位,并利用PBoW模型进一步识别3种初定位图,效果较好;采用SIFT算法能准确定位斜撑上端和短斜撑下端连接处。利用Hough圆检测、Canny算子边缘检测、闭运算和圆环内非连通区域分布规律实现了开口销1、2和6三处表面开口销脱落状态和张角不足状态的检测,能疑似判断开口销松脱情况,但对松脱程度的判断有待进一步研究。由于开口销3和5可能受螺钉遮挡的干扰,难以提取圆环内完整的开口销部件,因此本文所提基于连通区域分布特征的检测判据不适用于此类表面开口销检测。针对双耳下方开口销,所提判据基于销钉受力部分和两端非受力部分长度,能准确检测其松脱和脱落状态。实验结果表明本文所提方法实现了6处开口销的准确定位和4处开口销的状态检测,具有较高的正确检测率,为接触网零部件故障检测提供了一种技术参考。
参考文献:
[1]钱清泉,高仕斌,何正友,等.中国高速铁路牵引供电关键技术[J].中国工程科学,2015,17(4):9-20.
QIAN Qingquan,GAO Shibin,HE Zhengyou,et al.Study of China High-speed Railway Traction Power Supply Key Technology[J].Engineering Sciences,2015,17(4):9-20.
[2]白玉新.接触网常见故障及对策研究[J].中国铁路,2009(3):62-64.
BAI Yuxin.Catenary Common Faults and Countermeasures Research[J].Chinese Railways,2009(3):62-64.
[3]韩志伟,刘志刚,张桂南,等.非接触式弓网图像检测技术研究综述[J].铁道学报,2013,35(6):40-47.
HAN Zhiwei,LIU Zhigang,ZHANG Guinan,et al.Overview of Non-contact Image Detection Technology for Pantograph-catenary Monitoring[J].Journal of the China Railway Society,2013,35(6):40-47.
[4]杨红梅,刘志刚,韩烨,等.基于快速鲁棒性特征匹配的电气化铁路绝缘子不良状态检测[J].电网技术,2013,37(8):2297-2302.
YANG Hongmei,LIU Zhigang,HAN Ye,et al.Defective Condition Detection of Insulators in Electrified Railway Based on Feature Matching of Speed-up Robust Features[J].Power System Technology,2013,37(8):2297-2302.
[5]冯倩,陈维荣,王云龙,等.受电弓滑板磨耗测量算法的研究[J].铁道学报,2010,32(1):109-113.
FENG Qian,CHEN Weirong,WANG Yunlong,et al.Research on the Algorithm to Measure the Pantographic Slipper Abrasion[J].Journal of the China Railway Society,2010,32(1):109-113.
[6]韩烨,刘志刚,韩志伟,等.基于SIFT特征匹配的高速铁路接触网支撑装置耳片断裂检测研究[J].铁道学报,2014,36(2):31-36.
HAN Ye,LIU Zhigang,HAN Zhiwei,et al.Fracture Detection of Ear Pieces of Catenary Support Devices of High-speed Railway Based on SIFT Feature Matching[J].Journal of the China Railway Society,2014,36(2):31-36.
[7]张桂南,刘志刚.基于角点匹配与谱聚类的接触网绝缘子破损/夹杂异物故障检测[J].仪器仪表学报,2014,35(6):1370-1377.
ZHANG Guinan,LIU Zhigang.Fault Detection of Catenary Insulator Damage/Foreign Material Based on Corner Matching And Spectral Clustering[J].Chinese Journal of Scientific Instrument,2014,35(6):1370-1377.
[8]王旭东,吴积钦,徐可佳,等.基于AdaBoost算法的接触网定位器识别[J].高速铁路技术,2014,5(3):9-12.
WANG Xudong,WU Jiqin,XU Kejia,et al.Identification of OCS Locator Based on AdaBoost Algorithm[J].High Speed Railway Technology,2014,5(3):9-12.
[9]DUDA R O,HART P E.Use of the Hough Transform to Detect Lines and Curves in Pictures[J].Communication of the ACM,1972(15):11-15.
[10]LI F F,PERONA P.A Bayesian Hierarchical Model for Learning Natural Scene Categories[J].Computer Vision and Pattern Recognition,2005,2:524-531.
[11]LI F F,FERGUS R,PERONA P.One-shot Learning of Object Categories[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(4):594-611.
[12]曹春红,赵大哲,张斌,等.基于PLSA-BOW模型的医学影像分类算法的研究[J].计算机应用与软件,2012,29(12):103-107.
CAO Chunhong,ZHAO Dazhe,ZHANG Bin,et al.Medical Image Classification Algorithm Based on PLSA-BOW Model[J].Computer Applications and Software,2012,29(12):103-107.
[13]LAZEBNIK S,SCHMID C,PONCE J.Beyond Bag of Features:Spatial Pyramid Matching for Recognizing Scene Categories[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.New York:IEEE,2006:2169-2178.
[14]DALAL N,TRIGGS B.Histogram of Oriented Gradients for Human Detection[C]//2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition,San Diego.New York:IEEE,2005:886-893.
[15]ANIL K J.Data Clustering:50 years beyond K-Means[J].Pattern Recognition Letters,2010,31(8):651-666.
[16]LOWE D G.Distinctive Image Features from Scale-invariant Keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[17]FISCHLER M,BOLLES R.Random Sample Consensus:A Paradigm for Model Fitting with Application to Image Analysis and Automated Cartography[J].ACM,1981,24(6):726-740.
[18]PENG T,BALIJEPALLI A,GUPTA S K,et al.Algorithms for On-line Monitoring of Micro-spheres in an Optical Tweezers-based Assembly Cell[J].ASME Journal of Computing and Information Science in Engineering,2007,7(4):330-338.
[19]熊俊涛,邹湘军,王红军,等.基于Retinex图像增强的不同光照条件下的成熟荔枝识别[J].农业工程学报,2013,29(12):170-178.
XIONG Juntao,ZOU Xiangjun,WANG Hongjun,et al.Recognition of Ripe Litchi in Different Illumination Conditions Based on Retinex Image Enhancement[J].Transactions of the Chinese Society of Agricultural Engineering,2013,29(12):170-178.
猜你喜欢
机械制造(2022年9期)2022-12-28
中国铁路(2022年8期)2022-09-22
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
中国应急管理科学(2022年2期)2022-05-23
轻兵器(2022年3期)2022-03-21
云南画报(2021年10期)2021-11-24
云南画报(2020年12期)2021-01-18
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
铁道建筑技术(2019年6期)2019-11-29
