
直升机噪声适航审定试验测试系统设计及应用
2018-07-04 02:57,,
计算机测量与控制 2018年6期
,,
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
民用直升机噪声适航合格审定噪声符合性验证对试验条件和测量条件、地面噪声测量、有效感觉噪声级(EPNL)数据计算、向中国民用航空局报送数据、大气声音衰减、飞行试验结果修正等方面都提出了详细的要求和相应的计算公式[1]。因为得到最终噪声评定值的影响因素非常多,要成功完成一次试验非常不容易,需要多方协调、甚至等待合适时机才能进行试验。
按照传统的试验方法,在现场试验时,对于噪声数据测量环节,一般是通过磁带机记录时间历程数据,或者使用数字式噪声测量系统记录时间历程数据,其它系统,如机载系统记录发动机、GPS轨迹[2]等数据,专用航迹测量设备记录飞行轨迹数据,机场塔台或专用气象记录设备测量大气数据等,试验后对所有数据进行综合分析、修正等工作,时间周期长,最关键的是现场不能对数据的有效性进行判断,事后分析一旦发现数据不符合要求,必须进行重新试验,将浪费大量的人力、物力和时间。
针对传统试验噪声测量不能实时数据处理及现场试验数据有效性初步判断存在的不足,本文设计了一套噪声测量及实时数据处理系统,在试验进行过程中就能实时对试验数据有效性进行判断。
1 系统组成及原理
1.1 系统组成
测试系统硬件组成由机载部分和地面部分组成。测试系统如图1所示。

图1 测试系统组成框图
机载部分由以下几个部分组成:
1)直升机飞行陀螺[3]:用于测量飞行姿态,主要用于起飞、飞越及进场时测量航迹与参考平面实际夹角,图2为实测和基准起飞剖面比较示意图;
2)高度传感器:测量飞机实际飞行高度,用于和标准高度比较,对测量结果进行修正;
3)发动机参数:主要包括发动机扭矩、旋翼转速等信号;
4)GPS时码[4]:机载采集器有专门的GPS时间采集模块,用于机载采集器测量数据时间标签,为后续数据分析查找同步时间点;
5)记录器:通过模拟量、总线信号卡等采集相应测量参数,存储在记录卡上。
地面测试站由以下几个部分组成:
1)声学测量传感器:声学传感器采用世界知名的声学测量厂家B&K公司生产的产品,性能优越,基本上是业界标准[5-6]。也可以采用其它公司的产品,只要性能达到适航标准提出的技术要求,试验前六个月以内经过专业计量单位计量合格,且需要报备;
2)调理器:采用B&K公司与声学传感器配套的信号调理器,输出电压模拟量信号进入数据采集设备。调理器同样需要在试验前六个月以内由专业计量厂家计量,出具合格证明才能使用,且需要报备;
3)GPS时码采集:采用PCI总线的GPS时间采集卡,采集卡安装在数据采集控制计算机内部,用于地面采集数据时间同步信息;
4)采集器:采集器由标准VXI[7]总线机箱,1394总线控制卡与测控计算机通讯,采集模块采用安捷伦公司著名的动态信号分析[8-9]模块,型号为E1432A。单块采集模块16个并行采集通道,分析带宽20 kHz,采样率51.2 K/s,采集器需要由专业计量单位计量以确保其技术指标满足航空器型号和适航合格审定噪声规定提出的要求;
5)数据采集及分析计算机:该计算机主要用于对采集器控制、测量数据传输、测试软件、分析软件运行等功能。
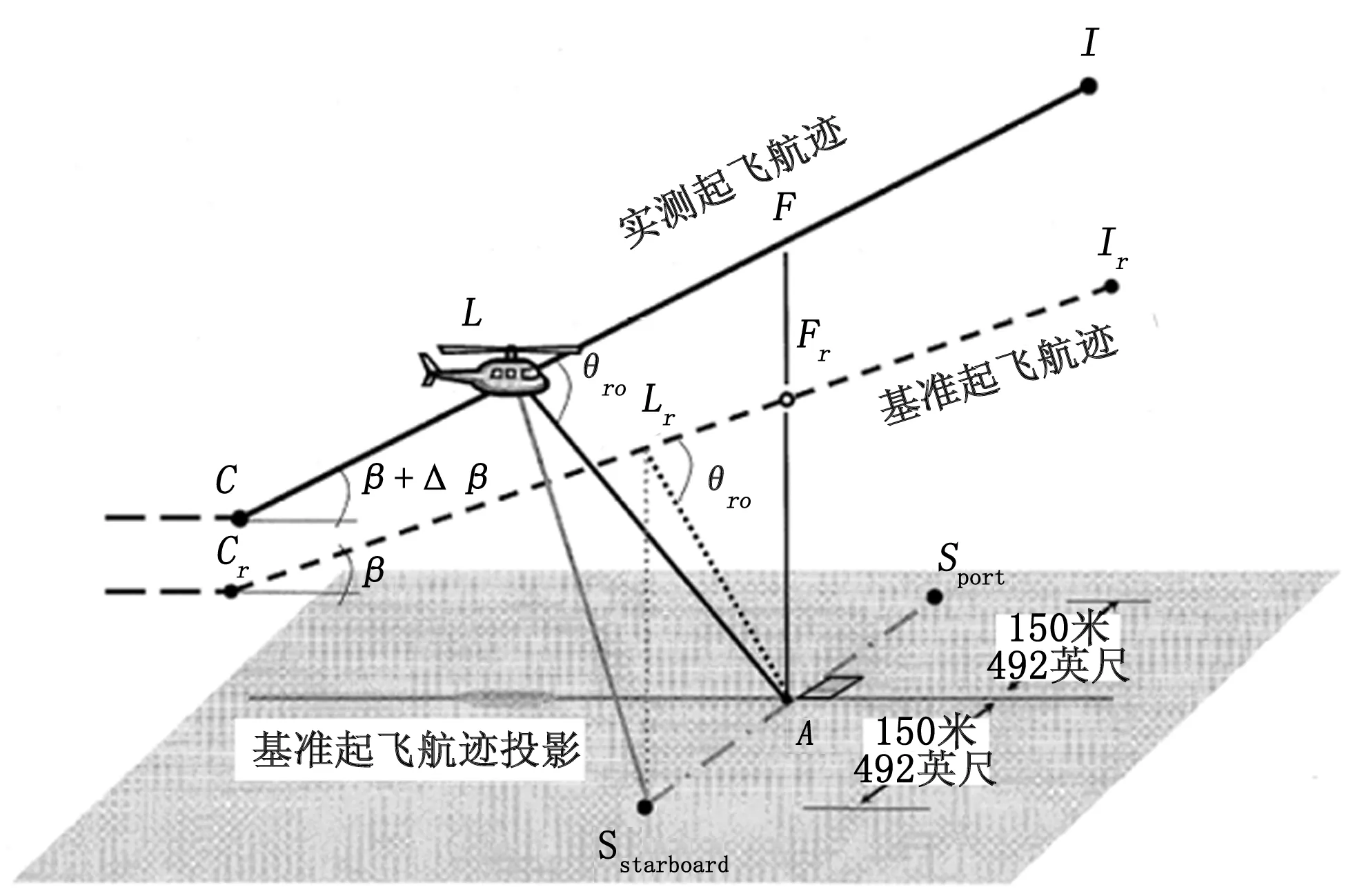
图2 实测和基准起飞剖面比较示意图
1.2 工作原理
试验数据来源主要由地面测试和机载测试两个部分:
如图2所示,以A点为中心,左右各150米处放置一个传声器及信号调理器,在A点放置一个传声器及信号调理器,总共3个噪声测量点。数据采集器及分析计算机放在A点附近。
在全部试验准备就绪好的情况下,首先测量环境背景噪声,作为试验是否有效的判断条件之一。直升机从远处向C点位置飞来,听从试验指挥员的指令,提前一段时间进行数据采集,直到直升机完全离开后停止数据采集,立即开展三分之一倍频程分析、纯音修正感觉噪声级、音调感觉噪声级时间历程,现场对数据的有效性进行判断,以便确定下一步工作的开展。分析判断一般在3分钟之内能够完成,这段时间内直升机可以掉头回飞,重新做好下一次的试验准备工作。
机载部分采集的数据主要用于因实际飞行航迹、发动机实际工作状态与标准参考数据不一致需要对试验结果进行修正。一般在试验结束后,从机载记录器中取下数据存储卡,通过专用计算机对试验数据进行导出,再按照适航条例的修正要求进行修正处理,得到最终的EPNL评价数据。
1.3 技术难点
1.3.1 时间同步
机上测量数据信息与轨迹修正有很大关系,因此机上数据与地面测量数据之间时间同步信息关系很大。该系统解决方法是采用GPS时间信息同步。机上和地面采用两套GPS时间采集卡采集时间信息作为同步信号。地面采集系统程序设计上,启动数据采集之前,读取GPS时间信息,作为数据采集起始时间,后面的时间信息由数据采集系统本身采集时钟确定。读取到的时钟信息到启动数据采集存在一定的时间间隔,同时两套GPS时钟系统之间也存在一定误差,机载GPS与机载数据采集数据之间也存在一定的时间间隔。确定这些时间间隔误差的措施是将两套数据采集系统在地面输入同一信号进行采集,根据采集波形信号及时间码进行对比分析,确定时间误差,经测试,误差在毫秒级,对本次试验数据分析影响可以忽略不计。
1.3.2 E1432A编程控制
E1432A动态信号分析仪功能非常强大,板卡上具有滤波器、频谱分析、三分之一倍频程分析、阶次跟踪等功能。用于编程的驱动程序函数就有300多个,具有16MB存储模式非常灵活。要使用好该仪器,首先需要全面了解仪器工作原理,熟悉各种工作模式和各个函数的调用。结合本次试验需求,最终采用该设备采集时域波形数据,板载数据存储采用先进先出(FIFO)内存数据结构模式,数据采集触发采用软件触发模式。
2 软件设计
软件设计是该系统开发的重点和难点,设计内容主要包括人机界面、数据采集,数据处理,数据修正等方面。
2.1 开发平台
该系统采用LabVIEW软件作为开发环境,该开发平台是NI公司开发基于图形化的编程平台,经过多年发展,功能强大,非常适合于测试系统集成开发[10-11]。
该开发平台具有丰富的图形控件,多种逻辑控制和程序控制方法,支持各种流行的硬件设备、方便设备通讯控制,具有丰富的软件开发工具包,如本系统中使用的振动及噪声分析工具包。通过多年的发展,该软件本身自带丰富的软件开发例子程序,具有很好的借鉴作用,极大提高了软件开发效率。
2.2 软件流程设计
软件流程总体上分为三个阶段:
第一阶段是硬件初始化阶段。包括对VXI数据采集设备及GPS时间码采集卡初始化,使仪器设备处于待机状态。对于初始化不成功,有两种情况,一种是设备故障或者异常,另一种是数据回放分析工作状态,根据配置情况进行判断采取相应工作流程。
第二阶段是数据采集、三分之一倍频程分析、感觉噪声级分析、各种参数设置及各种数据显示。
第三个阶段为程序退出及硬件设备关闭。
软件流程图见图3,软件运行界面见图4。
2.3 数据采集
2.3.1 E1432A数据采集
由于试验只需要3个通道,因此使用1块E1432A采集卡。噪声数据分析带宽为20 kHz,因此采样率设为51.2 K/S。1394火线数据传输率为134 MHz,传输速率完全满足本试验要求,但考虑到试验过程数据必须连续,不能有断点,所以将板卡数据采集模式设置为FIFO模式,确保采集到的数据不会有任何丢失。
在该系统中,一方面简化E1432A设置,同时考虑到将来可能采用其它数据采集设备,因此并没有使用设备本身自带的三分之一倍频程分析功能,只使用E1432A仪器时域数据采集功能,该系统三分之一倍频程分析采用NI公司开发的声音与振动信号分析工具箱编程实现。
2.3.2 GPS时码采集
GPS时码采集卡同样分为三个部分,板卡初始化,数据读取及板卡关闭。初始化放在E1432A初始化相同位置,数据读取放在E1432A数据触发采集之前位置,把读取的时间数据存储在时间变量中,板卡关闭功能放在E1432A关闭相同位置。
2.3.3 数据综合处理
因为数据采集卡内部时钟精度很高,只要得到第一个数据采集点时间,后面数据采集时间就可以确定。对前面读取的GPS时间作为第一个数据采集点起始时间即可。
2.4 三分之一倍频程分析
2.4.1 三分之一倍频程介绍
对噪声做频谱分析时,一般不需要每一个频率上声能量的详细分布,为了方便起见,常在连续频率范围内把它划分为若干个相连的小段,每一小段叫做频带或频程,每个小频带内的声能量被认为是均匀的,然后研究不同频带上的分布情况。根据不同的要求,声学量的分析频带带宽的选择也不一样。若分析精度要求高时,应选用窄频带宽;若是简单测量,则频率分析带宽可以放宽。实际测量中最为常用的频率分析带宽为窄带宽、倍频程和三分之一倍频程带宽。本次试验适航条例要求的是三分之一倍频程分析。
三分之一倍频程分析是本次试验的核心,也是整个试验数据分析的基础。适航条例要求采用IEC 61260 标准,标准中规定了三分之一倍频程分析系统的相对衰减、抗混叠滤波器、实时操作、级线性及滤波器在有效带宽上积分响应等技术指标。

图3 软件流程图
2.4.2 程序设计
为了降低软件开发难度,采用NI公司声音与振动专用软件开发工具箱。该工具箱支持多种声音测量标准,如IEC 61260: 1995, Class 1、IEC 61672: 2002, Class 1、ANSI S1.42: 1986等。其中本次试验采用的就是IEC 61260标准。
工具箱提供了丰富的例子程序,重点是要掌握三分之一倍频程分析函数工作原理、相关参数含义,如平均类型、频率范围、标准选择、计权方式、数据长度、时间长度、循环次数等参数设置,能够正确设置相关参数。通过设计演示验证例子程序,并通过标准信号发生器作为数据采集系统激励信号,采集分析数据结果和B&K公司专业噪声测量系统(型号3560)测量数据进行对比,结果一致,满足适航标准对三分之一倍频程分析技术指标。
2.5 瞬间感觉噪声级PNL(k)计算
2.5.1 PNL(k)计算原理
根据标准提供的计算要求,首先将24 个三分之一倍频程声压级(SPL)换算成感觉噪度(呐),然后将呐值相加,得到瞬间感觉噪声级PNL(k)。下面给出一个计算公式进行说明:
当SPL≥SPL(a)时,用下面公式计算感觉噪度值,n=antilog{M(c)[SPL-SPL(c)]},公式中的常量a、c、M(c)见表1。SPL处于其它范围区间采用相应的公式,这里不再详细说明。
表1 呐值数学计算公式中的常量

2.5.2 程序设计
将表1中的常量设计成一个二维数组,根据三分之一倍频程声压级(SPL)的值进行判断,通过查表的形式得到相应的常量数据进行计算。整个计算程序设计为一个子函数。
考虑到程序的适应性及未来扩展使用,将常量表数据存为一个文件,程序运行时首先将数据从文件中读入临时变量中供相关计算使用。
2.6 频谱不规则性修正
2.6.1 修正原理
频谱中有明显不规则性的噪声(例如,最大离散频率成分或纯音),必须通过计算得到修正因子C(k),该计算过程比较复杂,需要通过十个计算步骤才能得到该修正值,简要说明如下:
第一步:从80 Hz 三分之一倍频程(第三频程)开始,按给定的方法计算声压级的变化s(i,k);
第二步:圈出斜率变化的绝对值大于5的斜率s(i,k);
第三步:通过对s(i,k)取值范围判断,确定SPL(i,k)值;
第四步:通过相关公式计算出新的、调整后的声压级SPL′(i,k);
第五步:按给定公式,重新计算新斜率s′(i,k);
第六步:按给定公式,计算三个相邻斜率s′(i,k)的平均值;
第七步:按给定公式,计算三分之一倍频程声压级的最后结果SPL’’(i,k);
第八步:按给定公式,计算原声压级与最终本底声压级之差F(i,k);
第九步:根据声压级差F(i,k)和表2,确定每个相关三分之一倍频程(3 至24)的纯音修正因子。
第十步:指定第九步中所确定的纯音修正因子中的最大值为C(k)。

表2 纯音修正因子
2.6.2 程序设计
频谱不规则性修正因子C(k),根据适航条例提供的计算要求,通过软件设计,先做成一个独立的软件,对中间的每一步计算结果进行监控。该程序适航条例中有专用的测试数据进行验算。经验算正确的程序,进行适当修改,做成一个子函数,经测试正确后集成到系统软中。演示程序运行情况见图4。
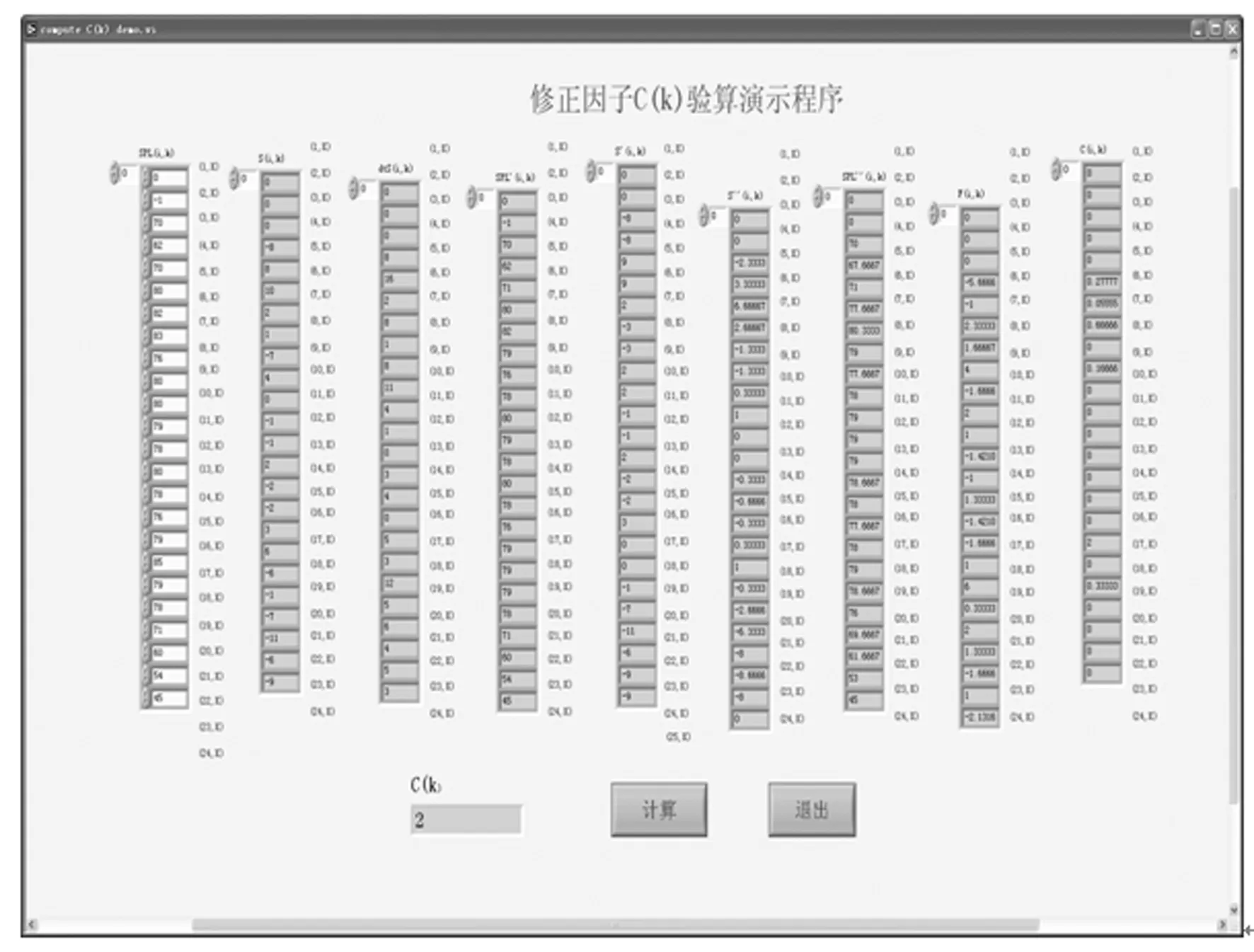
图4 频谱不规则性修正因子计算演示程序
该验证程序已经通过适航中心专业人员现场测试并得到认可。
2.7 纯音修正感觉噪声级
2.7.1 修正原理
纯音修正感觉噪声级由C(k)与相应的PNL(k)相加来确定,即:PNLT(k)=PNL(k)+C(k)。
在试验过程中,每隔0.5秒做一次三分之一倍频程分析,通过修正得到纯音修正感觉噪声级PNLT(k),一次试验完成,得到一条PNLT(k)时间曲线,通过判断PNLT最大值前后各有10分贝下降点数据,则本次试验数据有效(其它航迹等条件同时有效的情况下),这也是传统噪声测量系统不具备的功能。
2.7.2 程序设计
通过2.4及2.5计算结果,很容易得到PNLT(k)值。将PNLT(k)数据在飞越噪声时间历程图形中进行显示,对本次飞行试验数据是否有效进行判断。
2.8 其它修正
2.8.1 有效感觉噪声级
有效感觉噪声级EPNL 由最大纯音修正感觉噪声级与持续时间修正因子的代数和所确定:
EPNL=PNLTM+D。
2.8.2 数据修正
航迹、大气数据等修正,一般放在试验后期进行处理,目前这些修正处理还没有集成到该系统中,但不影响试验现场试验数据有效性判断处理。
2.9 技术难点
2.9.1 人机交互界面设计
软件功能主要有各种参数设置、多种数据存盘、数据采集、多种类型数据处理及显示、用于数据分析用的数据源可以是实时采集到的数据,也可以是磁盘上的文件数据,软件的数据处理具有较大的灵活性。试验过程中,需要实时查看的数据图形类型比较多,各种参数设置比较多,为方便查看及设置,软件界面设计采用了LabVIEW中比较有特色的标签控件,对不同功能进行分组显示。采用标签式设计模式,在每一种状态下,界面相对简洁,各种状态、界面查看方便。但在代码页面,各种控件数量非常多,为了代码看起来不太复杂,需要做好各种模块划分,尽可能设计成子函数供主程序调用。在PNLT时间历程图形中,设置了两条光标线,很容易判断出最大值与两边10分贝下降点,方便对试验数据有效性判断。
2.9.2 软件流程设计
该软件考虑到数据来源可以是数据采集器实时采集到的数据,也可能是存储的文件回放,还要考虑到将来更多类型的硬件设备集成,以及后期的进一步数据修正程序加入,所以在程序结构及流程设计上采取了多种措施。如硬件设备初始化阶段异常判断、试验数据源选择、试验数据内部传递等方面采取了相应的解决措施。软件结构设计上,采用并行结构,各个模块之间数据传递采用FIFO模式或文件形式,有利于软件功能的扩展。
2.9.3 软件算法实现
为了确保各个计算程序正确可靠,每一项计算开始都做成独立的程序。模拟各种仿真数据进行测试,完全满足要求之后进行改造,做成子函数,再进一步测试正确之后集成到系统软件中去。软件运行界面如图5所示。

图5 软件运行界面
3 试验结果
H425型001架机噪声适航审定试验在国内民用直升机上首次开展该类型试验,开发的计算软件适航中心相关人员进行了验算,符合要求。
该试验前期准备工作花了一个多月的时间,主要是飞机状态调整、天气及机场协调。正式试验大概花了2个小时,一次性成功完成。
试验分为起飞、穿越、进场三个状态,每个状态飞行三次。对每一飞行状态的经修正后的有效感觉噪声级(EPNL)值取平均,得出一个单一的修正后的有效感觉噪声级(EPNL)值。图6为一次起飞过程中音调感觉噪声级时间曲线。
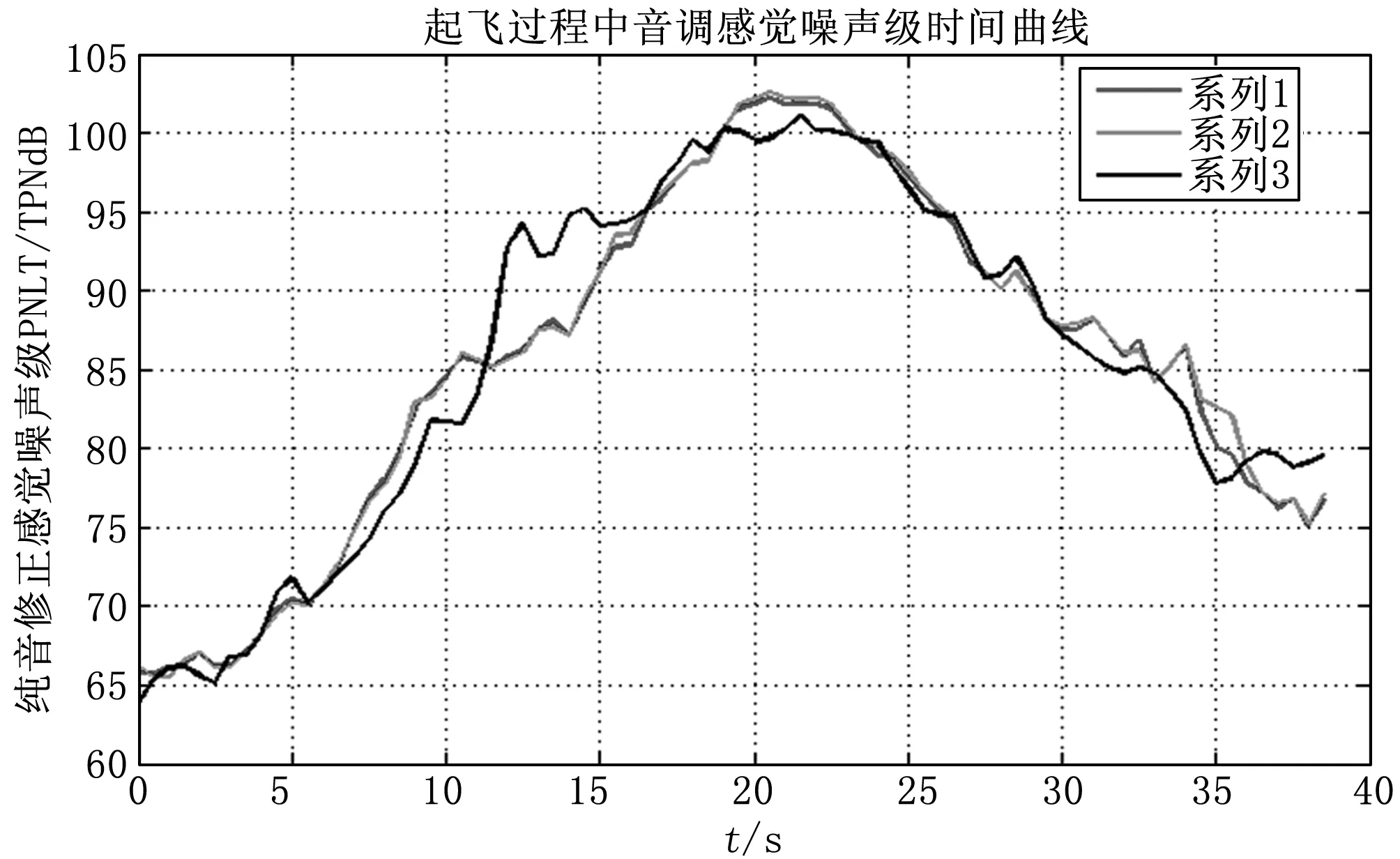
图6 起飞过程
试验结果证明:H425型001架机的起飞、水平飞越、进场的有效感觉噪声符合最大起飞总重为4 250 kg的直升机确定的噪声限制值[12],符合CCAR36第H36.305条的限制要求。
[15] Wu Y, Shen B, Ling H B.Visual tracking via online nonnegative matrix factorization[A]. IEEE Transactions on Circuits and Systems for Video Technology, 2014, 24(3):374-383.
[16] Kieritz H, Becker S,et al. Online multi-person tracking using integral channel features[A]. 13th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)[C]. 2016, 122-130.
[17] Danelljan M, Khan F S,et al. Adaptive color attributes for real-time visual tracking[A]. 2014.Computer Vision & Pattern Recognition[C]. 2014 :1090-1097.
[18] Chen S Y. Kalman filter for robot Vison[J]. IEEE Transactions on Industrial Electronics,2012, 59(11): 4409-4420.
[19] Zhang K H, Zhang L, Yang M H,et al. Fast trackingvia spatio-temporal context learning[J]. Computer Science,2013.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
快乐语文(2021年35期)2022-01-18
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
劳动保护(2019年3期)2019-05-16
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14
人间(2015年8期)2016-01-09
客车技术与研究(2014年6期)2014-02-28
