一种基于最长边提取和霍夫变换的图像空间校正方法
2018-07-16 12:04李佳蔚张瑞麟甘雨
电子技术与软件工程 2018年10期
文/李佳蔚 张瑞麟 甘雨
在图像融合之前,由于待融合的图像可能在不同的时间,或由不同的传感器获取,或存在角度差异,不能直接进行操作,而需要对图像进行空间校正预处理。所谓空间校正,就是通过变换T将待融合图像映射到统一的通用坐标系的几何校正。空间校正的关键在于图像配准,也就是寻找最佳变换T的过程。一种传统的校正办法基于二值化的灰度图像最外层轮廓与最小外接矩形。由于图像的轮廓往往并不封闭连续,一般会提取到许多轮廓,预处理时需要将这些轮廓全部存储下来。
1 传统的轮廓提取校正法
如图1所示,传统的基于轮廓提取和最小外接矩阵的旋转校正方法对于提取到的每一部分轮廓,计算最小外接矩阵,根据轮廓的最小外接矩阵获取旋转角度。
由于该方法需要计算所有的轮廓的最小外接矩阵并进行判断,计算量很大。同时由于并非所有具有一定面积的轮廓都能够表征图像的旋转信息,该方法的校正错误率也较高。
校正时,外接矩形的角度旋转校正中角度θ和矩形4个顶点的关系满足:

矩形顶点和中心点满足:


表1

其中(x,y)为外接矩形中心点,(xk,yk)为矩形顶点,角标k逆时针方向递增。
2 基于最长边筛选的旋转校正法
基于最长边筛选的旋转校正法在计算旋转角度时,选择了检测到轮廓最小外接矩形长边最长的轮廓表征图像的旋转信息。
该算法校正效果如图2、图3所示。
3 基于霍夫变换和阈值均值法的探测校正
由于算法的目的为计算校正角度,直接使用原边缘将比使用最小外接矩阵包含更多的旋转信息,将外接矩阵改进为使用霍夫变换探测原图像边缘中的直线。
同时,由于边缘检测的不完美性和噪声的影响,往往存在偏离的点或像素。这些错误的点或像素导致边缘偏离实际边界,轮廓不是规则的直线、圆、椭圆等几何图形。利用霍夫变换进行多数投票,选择累加矩阵中的最大值作为最可能的边缘,可以还原出图像实际轮廓。
霍夫变换基本公式为:
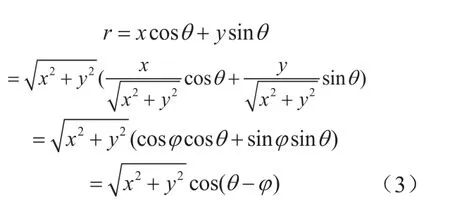
其中r为直线到坐标系原点距离,θ为直线的法向量与x轴正向夹角,φ为直线上一点的向量夹角。
基于直线的霍夫变换探测校正算法步骤为:
(1)对图像进行边缘检测,保存结果为灰度图;
(2)对图像进行标准霍夫变换;
(3)寻找累加平面极大值,找到图像中的直线边缘;
(4)取最大值,计算旋转校正角度;
(5)对图像进行旋转校正。
对图像进行Canny边缘检测(低阈值400,高阈值500),进行标准霍夫变换(角度精度1度,累加平面阈值150)效果如图4所示。

图1:传统轮廓提取校正法流程

图2:待校正图像二值化

图3:最长边筛选校正效果
如图5所示,在将直线角度转化为图像旋转角度时,采用均值和限制相结合的办法筛选直线。一般图像旋转校正的整体角度不会过大,取10度为旋转上界,取不超过该角度的所有直线角度的均值作为图像整体的偏离角度。霍夫平面的角度θ和直线的方向角φ满足θ=φ+90°,图像的旋转校正角度 α=-φ。
与基于轮廓和最小外接矩阵的校正方法相比,基于霍夫变换的校正显著降低了计算量,同时实验结果表明该方法具有同样好,有时甚至更好的校正效果。如图6所示。

图4:霍夫直线探测效果

图5:校正角度与直线角度关系

图6:基于霍夫变换的校正效果
4 实验对比与讨论
在2.8 GHz Intel Core i7处理器上,待校正图像大小791*525像素,传统的轮廓提取校正算法、筛选最长边的校正算法和基于霍夫变换的校正算法运行时间对比,筛选最长边使算法速度提升了97%,基于霍夫变换的校正算法又在筛选最长边的基础上提升了86%。如表1所示。
5 结束语
针对传统的基于轮廓提取的校正算法存在的计算量大和不准确的问题,本文提出的最长边筛选法将计算角度集中在最能表征旋转信息的最长边轮廓,基于霍夫变换的直线探测算法则更进一步地将最小外接矩阵精确到原轮廓。实验结果表明,最长边筛选法和加入霍夫变换在提升准确度的同时显著降低了算法计算复杂度,取得了良好的效果。
猜你喜欢
中老年保健(2021年4期)2021-08-22
装备制造技术(2020年1期)2020-12-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
制造技术与机床(2019年11期)2019-12-04
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
计算机工程(2015年4期)2015-07-05
电测与仪表(2015年8期)2015-04-09
河南科技(2014年12期)2014-02-27
舒适广告(2008年9期)2008-09-22