基于ZigBee的RSSI改进定位算法在列车盲区定位中的实现
2018-07-24 03:04李卫东刘影
大连交通大学学报 2018年4期
李卫东,刘影
(大连交通大学 电气信息学院, 辽宁 大连116028)
0 引言
ZigBee技术是一种具有低功耗、低成本和高可靠性等优点的双向无线通信技术,随着研究的不断深入,ZigBee技术的应用领域越来越广泛,技术也更加成熟.与蓝牙、WIFI等无线通信技术相比,ZigBee技术也具有其独特的优势和应用前景.其中,基于ZigBee的无线传感器网络节点定位就是非常重要的一项应用.基于接收信号强度(RSSI)的测距算法是利用无线电信号在传输过程中存在损耗,根据发射端与接收端信号强度的差值对两者之间的距离进行计算.在实际应用中利用RSSI测距,信号强度往往在传输过程中容易被外界环境干扰[1],本文在基于RSSI的三角形质心定位算法基础上加以改进来对待测节点进行定位可以提高定位精度[2].
1 RSSI改进加权质心定位算法
实际应用中,由于环境因素及信号在传播过程中的反射、散射等影响,信号会出现一定程度的附加衰减,因此,利用对数距离路径损耗模型测得的数据将更加准确.对数距离路径损耗模型的表达式如下:
Pi(d)=Pt(d0)+10nlg(d/d0)+Xσ
式中,Pt(d)表示待测节点与信标节点之间距离为d时的损耗强度,单位为dbm;PL(d0)表示待测节点与信标节点之间距离较近(一般为1 m)时的参考损耗值;n代表路径损耗指数;Xσ是均值为0的高斯分布随机变量.所以,待测节点接收到的信号强度可以表示为:
Pr(d)=Pt-PL(d)
Pt表示信标节点的发射强度;Pr(d)为待测节点收到的信号强度,也就是RSSI值.
采用四个信标节点参与定位[3],并以四个圆的公共弦交点所组成的区域代替类似DEF的相交区域,计算其质心坐标视为待测节点的坐标,如图1.图中E、F、G、H为4条公共弦的交点,设它们的坐标分别为(XE、YE)、(XF、YF)、(XG、YG)、
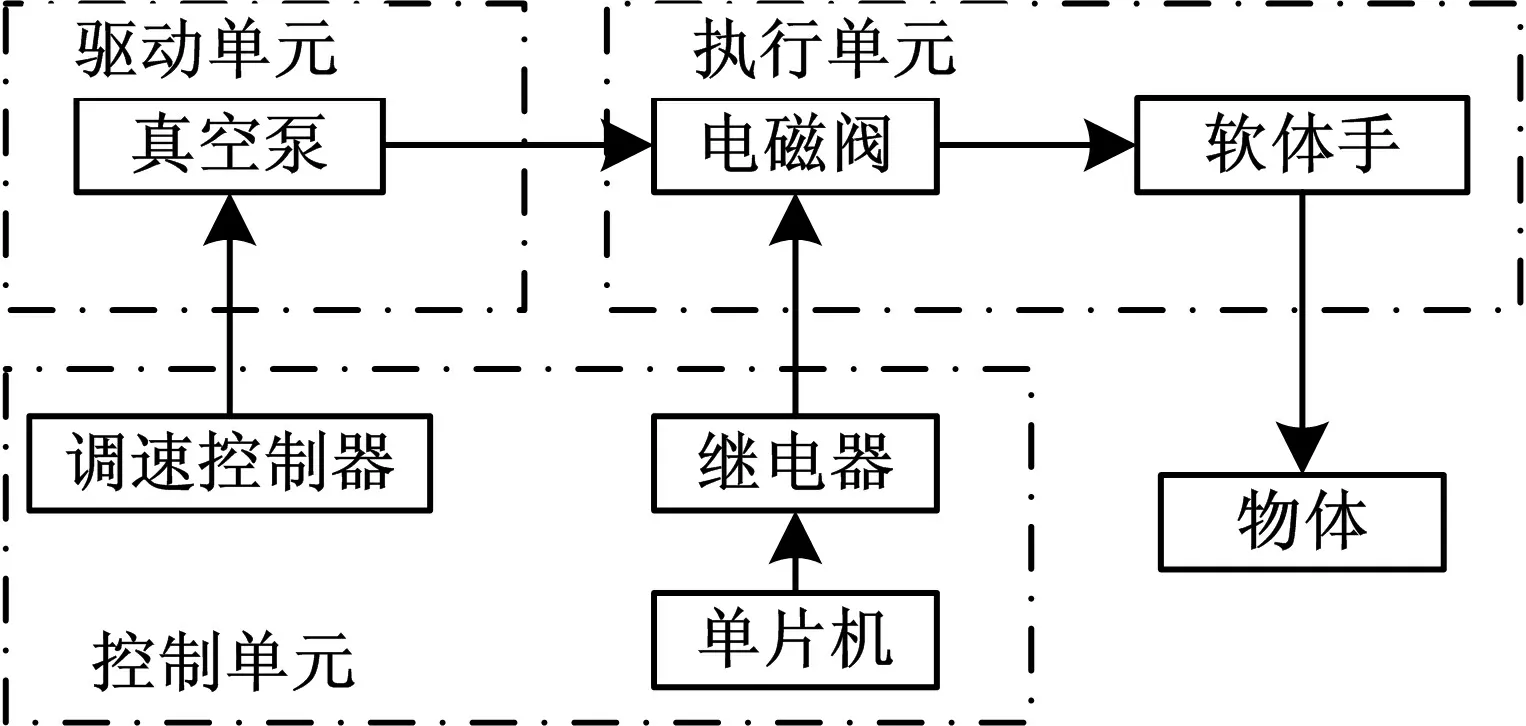
图1 改进质心定位模型
(XH、YH),根据质心定位的思想,将四边形EFGH的质心作为待测节点M的测量位置.则待测节点M的坐标为可表示为:
各信标节点的坐标已知且固定,所以测距会对定位准确性有很大影响,通过反复计算和验证可知,将距离作为加权因子,加权后待测节点的坐标表达式可表示为:
2 改进算法列车盲区定位系统中的实现
2.1 定位系统平台
本文选用的是基于CC2530(2.4GHz无线SOC)的ZigBee定位系统开发套件,主要硬件设备包括4个信标节点、1个待测节点、网关节点、仿真器、串口转USB线和PC机一台.信标节点和待测节点均为CC2530模块,采用2.4GHz IEEE802.15.4/RF4CE/ZigBee片上系统解决方案.模块的有效通信半径为80 m,工作频率2.4~2.485 GHz,经电池盒供电后可以独立运行使用,内置PCB天线,具备全功能仿真调试接口,能够直接下载仿真程序进行调试,也可以作为独立ZigBee开发板使用.本文所用ZigBee开发套件相关的软件主要有:VB 6.0、SmartRF Flash Programmer、Packet Sniffer、IAR Embedded Workbench以及上位机演示软件.
2.2 信标节点的布置
本文将信标节点以相隔50m的距离均匀布置在隧道壁两侧,如图2.当列车行驶到节点AC中间位置时就已经处于节点E的通信范围之内,同时还仍然处于节点A的通信范围之内,列车行驶在隧道的任何位置都能进行不间断地定位;此外,按照50 m间隔布置信标节点,使相邻两信标节点同时参与定位的最大范围直线距离为110m,设置标节点对外广播信息的时间周期为1 s时,时速达到198 km的列车在通过相邻两个节点时,理论上可以完成两次有效定位,而当列车通过两相邻节点时,在此期间定位时没有信标节点间的切换,因此完成的有效定位次数越多,其定位结果越接近系统的实际定位能力,数据的参考价值越高.

图2 信标节点布置图
2.3 定位测试及结果分析
由于测试环境的特殊性及条件限制,本文利用汽车代替列车,采用本文提出的定位算法对公路隧道内行驶的车辆进行定位测试实验,记录不同速度下测得的RSSI值和定位误差,进行数据分析,为接下来的研究工作提供依据.测试地点为位于大连市内的莲花山隧道,隧道全长2 600 m,宽10.6 m(自测),单向双车道.
2.3.1 参数测定
若要得到准确的RSSI值,首先要确定准确的参数A和n值,具体做法是:
(1)手持待测节点,调节待测节点与某个信标节点位置的相对远近,同时观察对应信号检测数值的变化,记录各信号强度数值下待测节点与参考信标节点间的距离;
(2)按照步骤(1)的方法依次完成待测节点与四个信标节点的通信距离(在各强度数值下的可达通信距离)测试,并做好记录;
(3)统计各信号强度数值下待测节点与信标节点的通信距离平均值;
(4)根据测距换算公式d=10^((ABS(RSSI)-A)/(10*n)),计算出最优的A和n值.
按照上述步骤操作,最终测得隧道内A和n的值分别为-22和4.6,再将A的数值转换成补码表示即为234.
2.3.2 测试结果及分析
信标节点横向间隔50 m,每间隔10 m做一处标记,方便对车辆的实际位置进行测量.4个信标节点的坐标分别为(50,0)、(50,10.6)、(0,10.6)、(0,0);汽车达到测试速度后保持车辆匀速行驶;当汽车驶入信标节点通信范围内时,上位机软件记录RSSI值,开始对车辆进行定位,观察和记录数据及测试车辆的定位情况,并记录每次完成定位时车辆的实际位置,便于误差计算.


图3 低速测试
将车速提高到50 km/h通过测试路段,操作同低速测试,随机获取该速度下某一次定位,根据上位机软件显示,此时测试车辆所处位置的定位坐标为(43.61,9.87);而经过实际测量计算,该时刻汽车所处的实际位置为(44.23,7.96),定位误差2.01 m,相比于低速行驶时,误差有所增大.
经过10次50 km/h速度下的定位测试,共采集到24组误差小于5 m的数据、4组误差大于6m的数据,以及2组未能完成定位的无效数据.经计算,所得28组有效定位数据的平均误差为3.74m,各误差数值按记录顺序如图4所示.

图4 50 km/h定位误差统计
将车速提高到60 km/h通过测试路段,再次随机获取该速度下某一次定位,由上位机软件显示,此时测试车辆所处位置的坐标为(23.68,-3.17);经过测量计算得到该时刻汽车所处的实际位置为(23.16,2.29),定位误差为5.48 m.定位误差有较明显的增大.
进行10次该速度下对车辆的定位测试,定位误差在3 m之内的定位结果共有4组,误差在3~6 m之间的有11组,另外误差大于6 m和定位失败的数据各有3组.经过计算,最大误差和最小误差分别为7.15 m和2.14 m,所得平均定位误差为4.46 m,各误差数值按记录的时间顺序如图5所示.

图5 60 km/h定位误差统计
3 结论
本文解决了列车在处于北斗定位盲区时的定位问题,用汽车代替列车,在大连市莲花山隧道内进行测试,比较不同速度下ZigBee定位系统对移动目标的定位结果.利用现有数据分析推断,系统的定位误差具有随速度增加而增大的趋势;但当车速从50 km/h增加到60 km/h之后,最小定位误差依然能够保持在2 m左右,平均误差的增量也在1 m之内,总体定位效果符合预期.但实验过程中,系统出现定位失败的情况说明,该定位系统在工作时仍然存在一定的不足,需要进一步加强改进策略;同时需要在条件允许的情况下对更高速度的车辆进行定位测试,获取更多准确客观的定位数据,为系统的不断完善提供有效参考.
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
汽车实用技术(2022年14期)2022-07-30
中成药(2022年1期)2022-01-27
北京航空航天大学学报(2021年4期)2021-11-24
铁道通信信号(2018年3期)2018-04-19
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
水道港口(2015年1期)2015-02-06
航天器工程(2014年5期)2014-03-11