基于波导不变量的深海船舶噪声特征研究
2018-07-30 09:19笪良龙徐国军崔宝龙
船舶力学 2018年7期
唐 帅,笪良龙,徐国军,崔宝龙
(海军潜艇学院,山东 青岛266071)
0 引 言
海洋环境中,船舶噪声通过海水传播,到达声纳接收器,通过后端信号处理系统对所接收的噪声信号进行分析处理,从而做出判决,确定是否存在目标以及目标的运动状态和目标种类。由于存在特殊的声速垂直剖面结构,深海环境中存在深海声道会聚区及反射会聚区现象,它们是深海中良好的声信道,能够远距离传输声信号[1-4]。然而,由于会聚区及反射会聚区现象的存在,在深海中,接收到船舶噪声信号,既可能是直达波目标,又可能是会聚区目标或反射会聚区目标,导致利用船舶噪声特征判断目标是否存在及其运动态势的传统方法难以奏效。波导不变量理论是俄罗斯学者Chuprov[5]提出,用于描述声场中的干涉现象。近年来,波导不变量相关理论主要用于浅海环境目标定位、运动态势分析和参数反演等研究[6-8]。
本文基于波导不变量理论,对典型深海环境中,不同距离的舰船噪声信号干涉条纹特征进行分析,并利用该特征对深海船舶目标及其运动态势进行初步判断,并用实测资料进行了验证。
1 典型深海声道环境效应
在深海环境中,由于海水中的声速随温度、盐度和静压力(或深度)变化而变化,以温度影响最为显著,深海温度沿垂直方向存在“三层结构”,使得声速在某一确定深度处声速有极小值,这一深度就是声道轴。声速剖面在轴的上方声速增大主要是由于温度升高,而在轴的下方则主要是由于静压力的增大形成的,这样的声道结构称为深海声道。
由于海深的不同,深海声道可分为两类,第一类情况c表层声速< c底层声速,如图 1(a)所示,存在深度余量,满足深海声道会聚区形成条件;第二类情况 c表层声速> c底层声速,如图1(b)所示,不存在深度余量。
图2中给出了两类声速剖面下,船舶噪声随距离变化的传播损失图。对于第一类情况,当深海船舶目标和接收器都位于海洋近表层时,船舶噪声形成向下的波束,该波束沿着深海折射路径传播后,重新出现在近海面,在距声源数十公里处产生一个声强较高的环带状区域,称为深海声道会聚区,如图2(a)。该现象随着距离的增大反复出现。会聚区传播是深海中良好的声信道,能够高强度、低失真地远距离传输声信号。第二类情况,当深海船舶目标和接收器都位于海洋近表层时,船舶噪声形成的向下的波束,受到海底界面的反射,会在海面重新聚焦,距离介于直达波距离与深海声道会聚区之间,称为反射会聚区,如图2(b)。
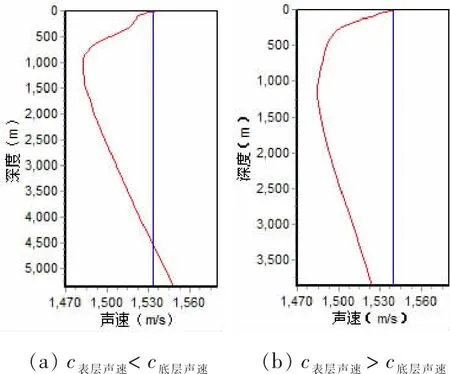
图1 深海声道声速剖面Fig.1 Sound-speed profile of deep-ocean
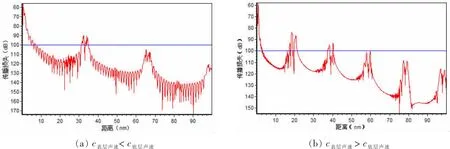
图2深海声道传播损失Fig.2 Transmission loss for deep-ocean profile
图3 给出了两种典型声道的船舶噪声的声线轨迹图。图3(a)给出了深海声道会聚区声线传播轨迹,从图中可以看出,深海声道会聚区主要是由波导传播模式,即相速度小于c底层声速的简正波形成的,这些简正波下反转点在海底上方,不与海底发生接触;图3(b)给出了反射会聚区声线传播轨迹,从图中可以看出,反射会聚区主要是由海底反射模式,即相速度大于c底层声速的简正波形成的,这些简正波与海底发生接触。
通过典型深海环境效应的分析,可以看出,在深海环境,由于深海声道会聚区和反射会聚区的存在,接收到的船舶噪声信号,既可能是直达波目标、又可能是深海声道会聚区目标或者反射会聚区目标。对于会聚区或反射会聚区内的船舶目标,由于距离较远,其噪声信号还具有方位变化率较小的特点。
因此,在深海环境中,通过船舶噪声信号强度、方位变化等传统目标信号分析方法已经难以判断目标的距离以及目标运动态势、解算船舶目标运动要素,直接导致无法有效预判深海船舶目标的机动态势,难以采取相应措施。
2 深海船舶噪声信号干涉结构
2.1 声场干涉结构分析
俄罗斯学者Chuprov于1982年发现了海洋声场具有这种稳定的距离-频率干涉结构,定义了一个标量-波导不变量β,波导不变量的值可用来表征声强距离-频率平面上条纹斜率,其隐含有声源距离信息。
波导声场结构一般都非常复杂,根据简正波理论,当声源与接收水听器间的水平距离大于水深的一定倍数时,单个无指向性的点声源所产生的水下声压场可由一组有限阶次的简正波的和来表示,当声源深度zs,接收器深度为zr,收发距离为r时,点源声场频率响应函数P r,zs,z;()ω 可表示为:

其中:νl=μl+iηl,μl为简正波本征值的实部,ηl为简正波的衰减,Φl()z为简正波的本征函数。定义简正波幅度为

则公式(1)可以写成

则声强可表示为,

其中:Δ μlm(ω )=μl(ω )-μm(ω)(m≠l)为简正波本征值之差。 接收声强由两部分组成:第一部分随距离和频率(这里假设模态函数的幅值并非频率的强函数)缓慢变化;第二部分由一系列cos因子累加而成,反映了模态函数之间的干涉特征,并且随着距离的变化而呈现振荡。这种振荡就导致了声强时频分布图上的波导不变条纹图案[9]。
2.2 深海干涉结构数值仿真
为了分析深海环境中是否存在干涉条纹特征以及干涉条纹与船舶噪声位置的关系,采用了图1所示的两种典型深海声道环境,设定声源深度为10 m,接收深度为100 m,传播距离60 nm,频带宽度为1 000-2 000 Hz。 海底参数为:海底密度=1.806 g/cm3,海底声速=1 668 m/s,海底吸收=0.692 dB/λ。
图4给出了第一类典型深海声道环境如图1(a)所示,即c表层声速<c底层声速,不同距离范围的声强距离-频率干涉条纹图。该环境下可接收到处于直达波和深海会聚区中的船舶目标噪声。通过图中对比可以看出,在这种环境下,直达波探测距离较近,而且处于深海环境,简正波号数增多,大量波导简正波和海底反射简正波同时存在,干涉条纹相互抵消,致使近距离声场声强较强,但干涉条纹却不明显;深海声道会聚区内,波导简正波在会聚区内聚焦,相互干涉,形成明显的干涉条纹图像。
图5给出了第二类典型深海声道环境,如图 1(b)所示,即 c表层声速> c底层声速,不同距离的声强距离-频率干涉条纹图。该环境下可接收到处于直达波和反射会聚区中的船舶目标噪声。通过对比可以看出,在直达波声场,与第一类深海环境仿真结果相近,干涉条纹不明显;在反射会聚区内,反射模式简正波产生聚焦,声强距离-频率图中存在干涉条纹,条纹结构与浅海条纹结构相似,但与深海声道会聚区的干涉条纹结构相反。
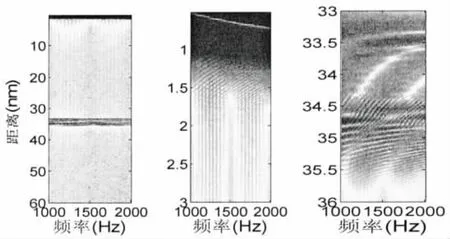
图4 深海会聚区声强距离-频率干涉结构Fig.4 Waveguide invariant striations simulation in deep-ocean CZ
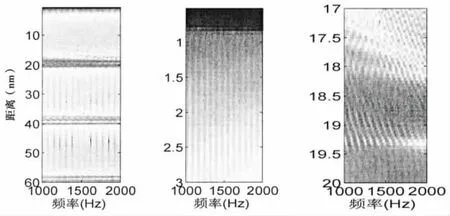
图5 反射会聚区声强距离-频率干涉结构Fig.5 Near-field waveguide invariant striations simulation in deep-ocean reflect CZ
通过分析还可以看出,处于深海声道会聚区或反射会聚区内的船舶目标,当目标与接收器处于不同态势时,即接近或远离,噪声信号的干涉条纹特征也不相同。
2.3 深海声场波导不变性
波导不变量(通常由β表示)是用来描述声场的距离-频率干涉结构。根据简正波原理,声场中声强的距离-频率图中有明暗相间的干涉条纹,波导不变量β的值可以表征干涉条纹的斜率。
根据定义[10],第m号和第l号简正波形成的波导不变量βml为

其中:ω为角频率,Δkml为第m号和第l号简正波的水平波数差,Δkml=krm-krl。
并且满足关系式

其中:r为声源到接收点的距离。
在浅海理想条件下,由于水平波数满足:

其中:m是简正波号数,d为海底深度。可以推导出在浅海理想条件下波导不变量值β为1。
在深海环境由于声场的复杂性,无法精确地求解满足定解条件的波动方程的解,往往只能求得一定近似条件下的形式解或数值解。因此,利用相慢度和群慢度对任意两号简正波的波导不变量βml进行重新定义。定义第m号简正波的相速度和群速度分别为:

相对应的相慢度和群慢度为:

则可波导不变量βml可表示为:

其中:ΔSp,ml=Sp,m-Sp,l,ΔSg,ml=Sg,m-Sg,l。 根据(12)式,可以看出,将声源频率 ω 所对应的 1 到 L 号简正波的群慢度Sg,m看成是随相慢度Sp,m变化的函数,即SgSp()。如果在某一区域内SgSp()函数可近似成一条直线,那么波导不变量β可以用该直线的斜率进行表示,且与简正波号数无关。

图6给出了典型深海声道环境中相慢度与群慢度的关系,从图中可以看出,SgSp()函数可以分为两个区间,即波导简正波区间和反射简正波区间。相慢度小于拐点的区间是反射简正波,相慢度大于拐点的区间是波导简正波。
利用公式(12)分别计算深海声道会聚区波导传播模式和反射会聚区反射传播模式对应的波导不变量β,计算结果如图7所示。其中,深海声道会聚区波导不变量β基本一致,平均值为-6.21;反射会聚区波导不变量β基本一致,平均值为0.83。结合波导不变量β估值对图4、图5中干涉条纹现象进行解释,由于深海声道会聚区对应的β值为负,与浅海相反,所以声强距离-频率干涉条纹样式与浅海相反;反射会聚区内,对应的β值为正值,近似为1,与浅海相近。因此,反射会聚区内声强距离-频率干涉条纹样式与浅海相类似。
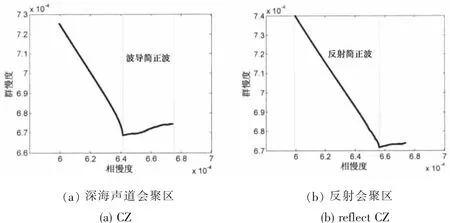
图6 典型深海声道相慢度和群慢度的对应关系Fig.6 Group slowness versus phase slowness for the deep-ocean waveguide

图7 典型深海声道波导不变量Fig.7 Waveguide invariant in deep-ocean waveguide

图8 直达波目标LOFAR谱Fig.8 LOFAR spectrum for near-field target
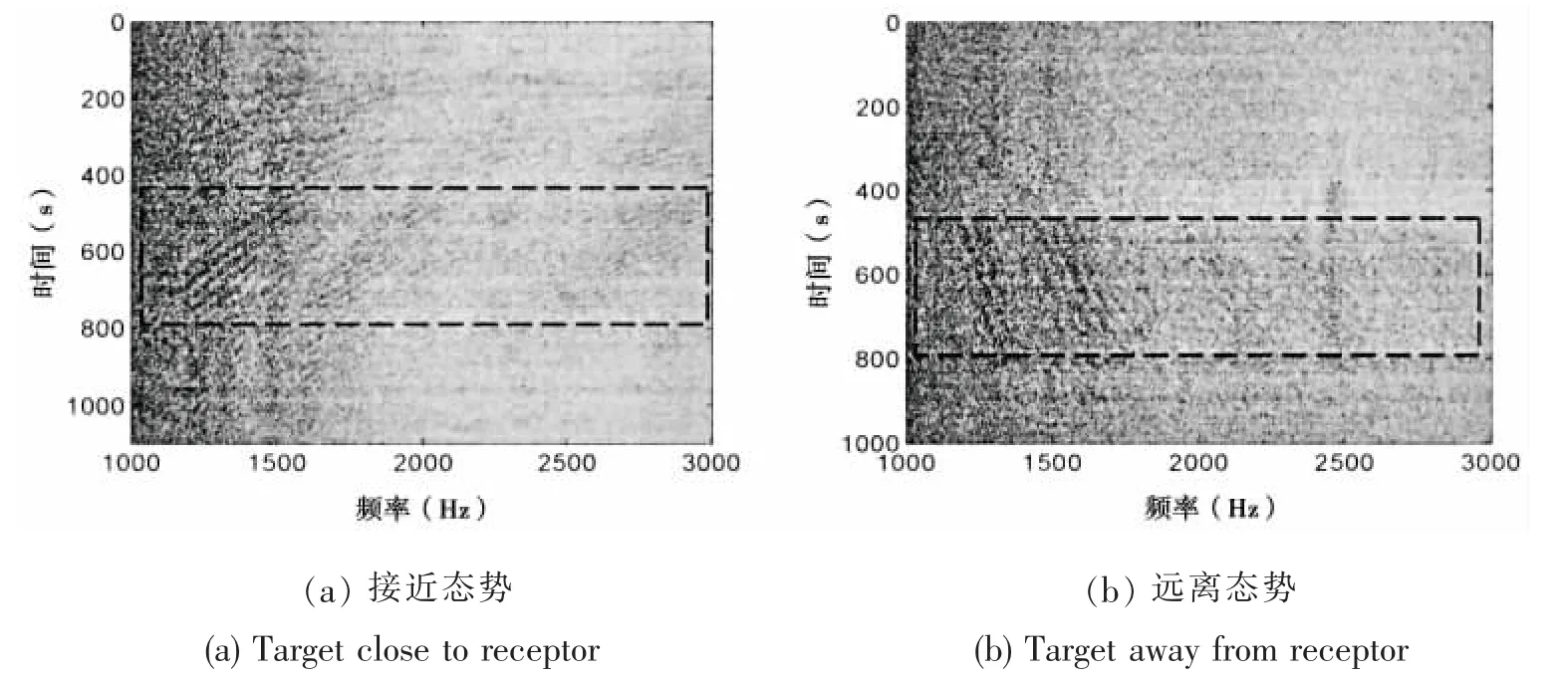
图9 反射会聚区目标LOFAR谱Fig.9 LOFAR spectrum for reflect CZ
2.4 深海干涉结构试验数据分析
某次深海试验中,不同距离接收到的船舶噪声信号声强距离-频率图,如图8-10所示。图8是深海直达波船舶目标噪声信号;图9是不同运动态势的反射会聚区船舶目标噪声信号;图10是不同运动态势的深海声道会聚区船舶目标噪声信号。
从图中可以看出,深海环境中,不同距离目标其距离-频率谱特征各不相同。深海近距离船舶目标噪声信号中不存在明显干涉条纹特征;深海声道会聚区船舶目标与反射会聚区目标噪声信号中存在明显干涉条纹特征,通过对比可以看出,深海声道会聚区目标干涉条纹特征较为清晰,而反射会聚区目标,受到海底反射的影响,干涉条纹特征较弱,试验结果与仿真结果一致。处于深海声道会聚区或反射会聚区的目标,目标与接收器运动态势不同,噪声信号干涉条纹也不同,与理论分析结果一致。
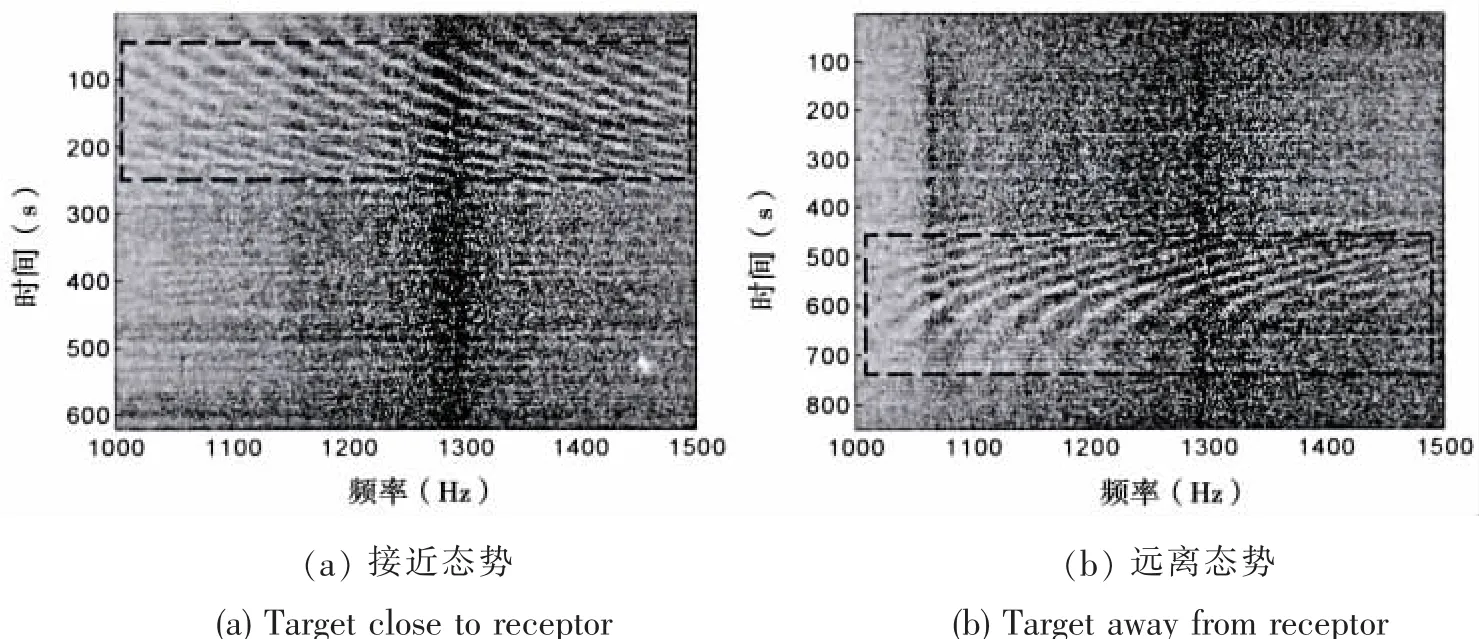
图10 深海声道会聚区目标LOFAR谱Fig.10 LOFAR spectrum for CZ striations
2.5 深海干涉结构应用
通过前文对典型深海环境干涉条纹及其波导不变量特征的分析,可以看出深海近距离声场、反射会聚区和深海声道会聚区干涉条纹特征存在明显区别。因此,结合环境信息、深海声道会聚区及反射会聚区船舶目标信号特点,可以对深海声道会聚区目标、反射会聚区目标及其运动态势进行初步判断。
(1)深海条件下,环境满足深海声道会聚区形成条件时,目标信号出现干涉条纹,方位变化率较慢,判断为深海声道会聚区目标。
进一步根据干涉条纹随距离-频率的变化趋势对目标运动态势进行判断。在声强距离-频率平面上建立坐标轴,定义某一干涉条纹P与距离轴y的偏角φ,如图11所示。
深海声道会聚区目标运动态势判断方法如下:
①φ<90°时,船舶目标处于接近接收器的态势;
②φ>90°时,船舶目标处于远离接收器的态势。
(2)深海条件下,环境不满足深海声道会聚区形成条件时,目标信号出现干涉条纹,方位变化率较慢,判断为反射会聚区目标。
反射会聚区目标运动态势判断方法如下:
①φ<90°时,船舶目标处于远离接收器的态势;
②φ>90°时,船舶目标处于接近接收器的态势。
(3)深海条件下,目标信号没有干涉条纹,方位变化率较快,判断为直达波目标。
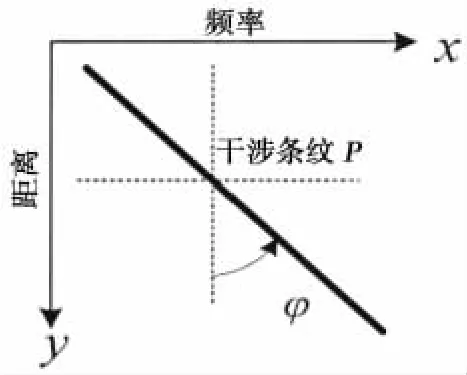
图11 距离-频率平面干涉条纹偏角Fig.11 Waveguide invariant striations declination in range and frequency plane
3 结 论
本文首先研究了两种典型深海声道的环境特点,分析了深海声道会聚区和反射会聚区声场的形成条件,在此基础上,研究了深海不同距离的船舶噪声信号声强距离-频率分布图中的干涉条纹特征,并利用波导不变量的理论对深海干涉条纹特征进行了解释。通过仿真结果和海试数据验证,深海环境中,近距离船舶目标噪声信号LOFAR谱中无明显干涉条纹,反射会聚区和深海声道会聚区目标信号存在明显的干涉条纹特征;深海声道会聚区内的干涉条纹主要由波导简正波形成,其对应的波导不变量β值为负,干涉条纹样式与浅海相反;反射会聚区内的干涉条纹主要由反射简正波形成,其对应的波导不变量β值为正,干涉条纹样式与浅海相近;深海声道会聚区或反射会聚区内,处于不同运动态势的目标,在声强距离-频率平面内干涉条纹的偏角不同。因此,利用深海干涉条纹特征,可以对深海船舶目标的位置及运动态势进行判断,增加了深海船舶目标信息的获取手段,为深入研究深海环境效应及其相关应用提供了新的思路和方法。
参 考 文 献:
[1]Jensen B,Kuperman W A,Porter M B,et al.Computational ocean acoustics(second edition)[M].American Institute of Physics,2011:21-23.
[2]张仁和.水下声道中的反转点会聚区(I)简正波理论[J].声学学报,1980,1:28-42.Zhang R H.A normal-mode theory of turning-point convergence zone in underwater sound channel(I)[J].ACTA Acoustic,1980,1:28-42.
[3]张仁和.水下声道中的反转点会聚区(II)广义射线理论[J].声学学报,1982,2:75-87.Zhang R H.A generalized ray-theory of turning-point convergence zone in underwater sound channel(II)[J].ACTA A-coustic,1982,2:75-87.
[4]Lynch S D.Dependence of the structure of the shallow convergence zone on deep ocean bathymetry[J].J Acoust.Soc.Am.,2010,127:1962.
[5]Chuprov S D.An invariant of the spatial-frequency interference pattern of the acoustic field in a layered ocean[C]//Proc of the Russian Academy of Sciences.Doklady AkademiiNauk SSSR,1981:257,475-479.
[6]Sostrand K A.Range localization of 10-100 km explosions by means of an endfire array and a waveguide invariant[J].IEEE J Oceanic Eng.,2005,30:207-212.
[7]赵振东.浅海声场干涉结构与宽带声源测距研究[D].青岛:中国海洋大学,2010.Zhao Zhendong.Interference patterns in shallow water and broadband source ranging[D].Qingdao:Ocean University of China,2010.
[8]韩 梅,储泽国,笪良龙.利用浅海干涉条纹反演海底参数方法研究[J].应用声学,2014,33(5):385-390.Han Mei,Chu Zeguo,Da Lianglong.Fusion algorithm of distance characteristic feature based on dynamically allocating weights[J].Journal of Applied Acoustics,2014,33(5):385-390.
[9]D’Spain G L,Kuperman W A.Application of waveguide invariants to analysis of spectrograms from shallow water environments that vary in range and azimuth[J].J Acoust.Soc.Am.,1999,106(5):2454-2468.
[10]Cockrell K L.Understanding and utilizing waveguide invariant range-frequency striations in ocean acoustic waveguides[D].Boston,USA:Massachusetts Institute of Technology,2011.
猜你喜欢
振动与冲击(2022年17期)2022-09-23
家庭影院技术(2021年10期)2021-11-20
家庭影院技术(2021年1期)2021-03-19
家庭影院技术(2020年7期)2020-08-24
河北省科学院学报(2020年1期)2020-05-25
家庭影院技术(2018年10期)2018-11-02
科技视界(2018年16期)2018-10-27
汽车实用技术(2018年10期)2018-06-01
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06