
农业物料撒播技术在无人直升机中应用的思考
2018-08-10 10:57宋灿灿周志艳罗锡文兰玉彬张海艳
农机化研究 2018年9期
宋灿灿,周志艳,3,罗锡文,姜 锐, 兰玉彬,张海艳
(1.华南农业大学 工程学院/广东省农业航空应用工程技术研究中心,广州 510642;2.国家精准农业航空施药技术国际联合研究中心,广州 510642;3.南方粮油作物协同创新中心,长沙 410128)
0 引言
作为现代农业的重要组成部分,农业航空因其环境适应性强、作业高效和及时性等优点近年来在国内外得到了快速发展[1-2]。航空作业不受作物长势的限制,不受地面环境的影响,不会破坏地表,利于作物后期管理,可大幅度降低成本,改善生态环境,提高经济效益。在发展现代精准农业中,农业航空承担着越来越重要的角色[3]。2010年以前,我国农用飞机以有人驾驶固定翼飞机和直升机为主[4],作业效率高,克服了传统作业方式的缺点;但需要专用机场起降,且有人驾驶飞机只能在大面积连片区域作业,对于小面积且分散的田块,有人驾驶飞机难以灵活控制作业范围。无人直升机无需专用机场,可在田间地头灵活起降[5],较高的实时性可对作业环境做出及时的响应[6-7],相比地面机械和有人驾驶飞机,无人机作业优势明显,无人直升机的出现给农业航空的发展开辟了新的方向[8-9]。
据统计,我国沼泽面积约1 100万hm2[10],沿海滩涂总面积约220万hm2[11],这些地区土壤水分大,严重潜育化。此外,我国南方地区多小田块,高差大,冷浸田有深厚的潜育层,排水不畅[12-13]。目前,全国约有冷浸田346万hm2,占全国稻田面积的15.7%[14],深泥脚田的泥脚深度可达30cm以上,要在这些区域进行作业,地面机械行走困难,较容易深陷田间。在平原地区,机械化水平提高较快,但地面机械对地表的压实破坏作用使后期作物的出苗率降低[15]。在丘陵地区,由于生产条件的限制,大型地面播种机械难以行走,主要依靠小型播种机作业,费时费力[16]。在丘陵、沼泽、电线杆、防风林、居民区等区域也不利于有人驾驶农用飞机播种作业。无人直升机可在地面机械和有人驾驶飞机难以作业的种植区进行作业,是对地面机械和有人驾驶飞机的完善和补充,可提高航空作业的环境适应性。
由于无人直升机存在有效载荷量少、滞空时间短等缺点[17],地面机械和有人驾驶飞机挂载的农业物料撒播器无法直接应用于无人直升机。为了开发出适合无人直升机挂载的农业物料撒播器,本文拟在综述国内外现有撒播技术的基础上,分析各种撒播技术的优缺点;针对无人直升机挂载播撒装置的特殊需求,提出无人直升机用于农业物料播撒的技术方案;基于无人直升机的农业物料撒播方法,分析无人直升机撒播技术的研究方向,为无人直升机撒播技术的研究提供参考。
1 常见农业物料撒播技术综述
撒播的对象主要是小粒径种子、肥料颗粒等农业物料,与育苗相比,撒播降低了移栽成本,提高了作业效率,是目前较常用的直播方法[18-19]。物料撒播作业主要分为排种和抛撒两个过程,将物料从物料箱均匀排出,并均匀抛撒是保证撒播质量的关键技术[20]。
1.1 常见的播量调控技术综述
播量调控技术用于将物料从物料箱内分离并控制出口排量,主要依靠排种器或其他结构实现播量调控。
1.1.1 机械式播量调控技术
机械式播量调控主要是根据种子粒型,在排种器上设计型孔或者沟槽,种子依靠自身重力经充种、排种从种箱中分离出来[20]。典型的有窝眼式、槽轮式、圆盘式、振动式、指夹式、带式、滚筒式、搅龙式、推杆式和环带孔式排种器等[21],主要依靠改变排种原理实现变量调控。
窝眼式排种器的重要部件是型孔,不同结构的型孔适应不同粒径的种子。窝眼式排种器工作时,物料颗粒在窝眼轮的转动下进入型孔内,并随之排出[22],窝眼轮的转速和型孔尺寸等是影响排种器性能的关键因素。崔红梅等人(2014)对玉米单粒播种机的可调窝眼式精密排种器进行研究,试验分析了排种盘转速和窝眼长度对播种质量的影响,确定了较佳的精量作业参数,玉米单粒指数达到88%;该排种器的窝眼大小可调,能适应不同的种子颗粒[23]。汤楚宙等人(2010)设计了一种由型孔轮和调节环组成的变容量型孔式排种器,移动调节环可改变型孔容积,实现无级变量调节[24]。窝眼式排种器的型孔尺寸对种子的要求较高,主要用于点播和穴播,通用性较差,播量调节不明显,难以实现较大颗粒流。
外槽轮排种器的关键部件是槽轮,排种时主要依靠外部动力带动槽轮转动,落入沟槽内的种子在槽轮的推拨下排出,播量取决于沟槽的尺寸、槽轮的有效工作长度和转速,通用性较好[25]。常金丽等人(2007)在外槽轮排种器的基础上设计了由压缩弹簧和调节手柄组成的播量调节装置,通过改变外槽轮的工作长度调节播量[26]。外槽轮排种器结构简单,可通过改变沟槽的尺寸调节排量,且可适应不同粒径的种子,方便调节播量。
圆盘式排种器关键部件是带有型孔的圆盘、刮种器和推种器,主要依靠圆盘上的型孔实现种子均布,对种子要求较高,受型孔限制,通用性差,主要用于穴播或单粒点播,播量依靠圆盘转速调节[27-28]。
振动式排种器主要依靠振动作用将物料箱中的种子振落,播量由振动频率决定。振动式排种器较适合偏圆形的物料颗粒,流动性好,可形成较大颗粒流。
指夹式排种器利用仿生原理,模仿人手指按压颗粒物体在平面上推动的动作,关键部件是仿生指夹和指夹盖,依靠凸轮实现仿生指夹和指夹盖之间的配合运动,利用仿生指夹与种子之间的摩擦力使种子到达指定位置[29],较适合单粒种子排种。
搅龙式排种器的关键排种部件是搅龙,通过改变搅龙叶片的尺寸和搅龙的转速调控播量。作业时,由单一的或者旋转方向相反的两个搅龙将物料箱内的物料颗粒沿搅龙长轴方向连续排列,常用于物料输送装置[30],对搅龙单位时间内的输送量要求不高[31]。
李顺等人(2012)设计了轻型带式排种装置,充种带安装在种箱底部,充种带上设有锥型孔,作业时种子自种箱锥形底部直接囊入充种带的型孔中,随充种带的转动靠自重脱离充种带[32]。
1.1.2 气力式播量调控技术
气力式排种器按照作用原理主要分3种:气压式、气吹式和气吸式,其相同点在于利用风机产生的气流形成压差,将种子囊入型孔内,并通过清种装置清除多余的种子[33],关键在于排种器的气流出入口处压差、空气流速及锥孔结构设计[34]。R.C. Singh等人(2005)设计了一种气力式排种装置,通过试验研究了排种盘转速、气流压力和吸种孔型对排种的影响,确定了单粒播种的最佳吸种孔的锥角及排种盘的转速等参数[35]。张国忠等人(2013)设计的水稻气力式排种器,主要用于水稻的精量穴直播,采用具有群布吸孔的吸种盘,利用气压差形成真空度,使种子顺利排布在吸种盘上,精确度较高且伤种率低[36]。赵文厚等人研制了4BQD-40气力喷播机喷射式排种器,利用高速气流吸种、压送的原理,将种子吸入管道内形成二相流,实现高速远距离抛撒种子,伤种率较低[37]。
气力式排种器需要独立的风机系统,对装置的气密性要求较高,气室结构复杂。
1.1.3 其他播量调控技术
陈书法等人(2012)研究了用于微小尺寸作物育苗的压电型振动气吸式排种方式,将压电驱动方式与气吸盘相结合,使种子产生利于吸种的“沸腾”运动,吸种率和吸种量与压电振动强度有关,吸种率高,伤种率低[38]。何培祥等人(2003)设计的电磁式排种器以PIC16 F 877为核心,利用光电控制技术,每次排种粒数由开关按钮控制,方便调整,可实现单粒或者连续排种[39]。张书慧等人(2004)设计了一套精准农业自动变量施肥机控制系统,以AT89C52单片机为中心,在不改变原有结构的前提下,通过改变排肥轴的转速实现变量调节[40]。
如前所述,目前研究较多的播量调控方法中,排种器主要分两类:①依靠排种通孔、型孔、沟槽等分离颗粒,形成单粒颗粒流,适用于精密播种,不适合撒播[41];②依靠振动带、传输带、旋转叶片分离颗粒,形成较大颗粒流,较适合颗粒分布不规则的播种作业。部分机械式排种器的播量调控原理同样适合控制颗粒流,如搅龙排种器的螺旋搅龙可在输送过程中形成颗粒流,通过卡紧机构和分度盘等结构将物料颗粒定位输出[42],可产生大排量颗粒流。外槽轮式排种器的沟槽结构加以改进也可形成颗粒流。无人直升机载荷量有限,滞空时间短,属于低空高速作业,现有的播量调控方法难以直接应用在无人直升机撒播上,需要对排种结构做进一步的研究和改进,以提高颗粒流量和播量调控的精度。
1.2 常见农业物料抛撒技术综述
抛撒是物料撒播作业的第二个重要技术,关键在于将排种器排出的物料颗粒流均匀地抛撒出去。现有的抛撒技术如下所述。
1.2.1 离心式抛撒技术
离心式抛撒技术的核心在于利用离心力将物料从高速旋转的离心圆盘上甩出。 P. Van Liedekerke 等人(2009)[43-44]和J. Reumers等人(2003)[45]分别对离心圆盘式撒肥机进行了仿真和试验,研究了颗粒飞离圆盘的运动规律和抛撒颗粒的轨迹等,发现抛撒均匀性主要与圆盘转速和圆盘上的叶片有关[46]。秦朝民等人(2004)设计了2SF-10型离心式撒肥机,并进行了田间试验,证明圆盘式撒肥机效率高,作业效果良好[47]。汤远菊等人(2014)设计了一种离心圆盘式的油菜撒播机,在离心圆盘周围设计了圆盘罩壳实现半边抛撒,使撒播幅宽可调[48]。离心圆盘通用性好,颗粒状的肥料和作物种子均可使用,抛撒幅宽较大,应用范围较广[49]。
1.2.2 气力式抛撒技术
气力式播撒是利用气流将农业物料颗粒吹出,实现播撒。例如,日本的背负式动力撒播机和水平喷管式撒粒机,工作时,种箱内的种子经排种装置排出,再经空气气流作用吹送到各个喷口,种子流撞击到喷口处的突起分散开来,实现撒播[50]。许令峰等人(2015)设计了一种风送式水稻撒播机,出口喷嘴设计成等截面面积渐变式的扁状扇形结构,便于颗粒抛撒[51-52]。
气力式抛撒技术的优势在于利用气流吹送种子,可实现较大的撒播量,且伤种率低;但要想得到较大的幅宽,需要引导气流沿不同的方向吹出,对装置的结构和气密性要求较高。
1.2.3 均分杆(板)式抛撒技术
均分杆式撒播机的特点是在排种管末端设置均分杆或者均分板,使来自排种管的颗粒流被分成若干较小的颗粒流,实现抛撒。此类撒播机较多用于有机肥和颗粒肥料的抛撒。吴海岩等人(2012)设计的小麦等深撒播机采用籽粒自流打散方式,在横向均撒装置上设置外罩,外罩的上方连接落种管,落种管的下端设有种子侧分杆,便于种子分流;外罩中设有匀种柱,可将种子打散[53]。马洪彬等人(2012)发明的适用于小麦播种机的匀种器,关键部件为分种盒和挡板,分种盒内至少有一个分种板,对种子进行分流;挡板底端设有阻挡片,下落的种子流在阻挡片上被打散,呈带状分布[54]。均分杆(板)式撒播主要是利用固定的杆(或者板)对种子进行分流,不能按需调整分流效果,且该撒播方式是基于带有排种管的撒播机。
1.2.4 摆管式抛撒技术
仿生技术的发展为撒播机的研究提供了一个新的方向,一些研究者模仿人手臂撒施化肥的方式研制出摆管式撒施机。吕新民和张李娴等人(2009)利用仿生学原理,模拟人手臂撒肥的动作特征设计了一种摆管式撒肥机[55],重点设计了由偏心盘和摆叉组成的摆动机构。高静华(2014)设计的摆管式撒肥机主要包括悬挂系统、驱动部件、肥箱、排料调节控制杆和排料管等部分,采用仿生学原理,模拟人手臂撒肥的动作,实现了肥料撒施的通畅和均匀,保证了施肥的稳定高效及施肥的一致性;特别是用在水田撒肥,作业效果良好,劳动生产率较人工提高了18~20倍[56]。李鹏和夏俊芳(2013)设计的通用性摆管式撒肥机模拟人手臂撒肥方式,通过摆动管往复摆动撒施化肥;另在该撒肥机肥箱中加装搅刀式搅肥装置,既可以撒施颗粒状肥料又可以撒施粉状肥料,扩大了应用范围[57]。
此外还有其他的抛撒技术,如锥盘式抛撒技术、甩链式抛撒技术,其工作原理与上述技术相似,不再赘述。
综上所述,国内外对撒播技术的研究已取得很大成就,能满足基本的撒播作业要求,但主要涉及地面撒播装置,且存在以下问题:离心式撒播虽可获得较大的幅宽,现有的装置大都是用大扭矩电机驱动,且颗粒是从圆盘中心正上方下落,并在360°的环形区域内抛撒,重播、漏播较严重;气力式撒播降低了伤种率,但现有的装置以精播为主,且现有风送管的分布需要支撑结构,较难直接挂载在无人直升机上。均分杆式、摆管式和锥盘式等的撒播装置目前大都挂载于地面牵引机械,不能直接用于无人直升机航空作业。
2 航空撒播技术综述
航空撒播是指在农用飞机上挂载专用撒播器进行农业物料撒播的作业方式。国内早期的航空撒播作业平台主要依托有人驾驶固定翼飞机和直升机。目前用于有人驾驶固定翼飞机的播撒器已比较成熟,多用于飞播造林和飞播牧草[58],但是专门用于无人直升机的撒播器尚处于研究阶段,未见大规模应用。
2.1 有人驾驶固定翼飞机常用撒播装置
2.1.1 风道式航空撒播装置
如图1所示:来自美国德克萨斯州博蒙特的风道式航空撒播装置是有人驾驶固定翼飞机撒播常用的装置,挂载在大型固定翼飞机底部,播量调控主要依靠大排量的长轴槽轮,抛撒主要依靠气流吹送实现。该装置设有入风口、入种口和弧形导流风道,导流风道分别向两侧呈弧形伸展,风道上间隔设置有若干出料口,利用飞机高速飞行时产生的高速气流,在导流通道内与物料充分混合,使物料颗粒获得较大的初速度,并沿若干风道脱离撒播装置,撒播幅宽大、效率高。

图1 风道式飞机撒播
R. W. Brazelton等(1968)报道了一种大排量的飞机撒播装置[59],如图2所示。该撒播装置在物料箱底部设置转动轴控制物料排量,下落的颗粒流在气流作用下经各个风道排出。实际作业中,该撒播装置安装在有人驾驶飞机底部,对物料的播量调控主要依靠安装在机舱底部的控制阀门,且由驾驶员手动控制,没有专用的抛撒机构,从机身底部控制阀门流出的物料颗粒随即被机身周围高速气流吹散。该装置需要高速气流,较适合有人驾驶固定翼飞机,且适宜在大面积连片区域作业。

图2 用于直升机撒播干物质的撒播装置
R. K. Bansal等人(1998)对利用气流进行飞机撒播肥料的试验进行了相关研究,通过建立FLUENT仿真模型,探究飞离装置的颗粒的速度的影响因素和分布规律,并与实际试验作对比,验证并得到了有人驾驶固定翼飞机撒播装置中的肥料出口速度与颗粒形状之间的关系[60]。
2.1.2 导管式航空撒播装置
图3为李万春(1995)设计的导管式航空撒播装置。
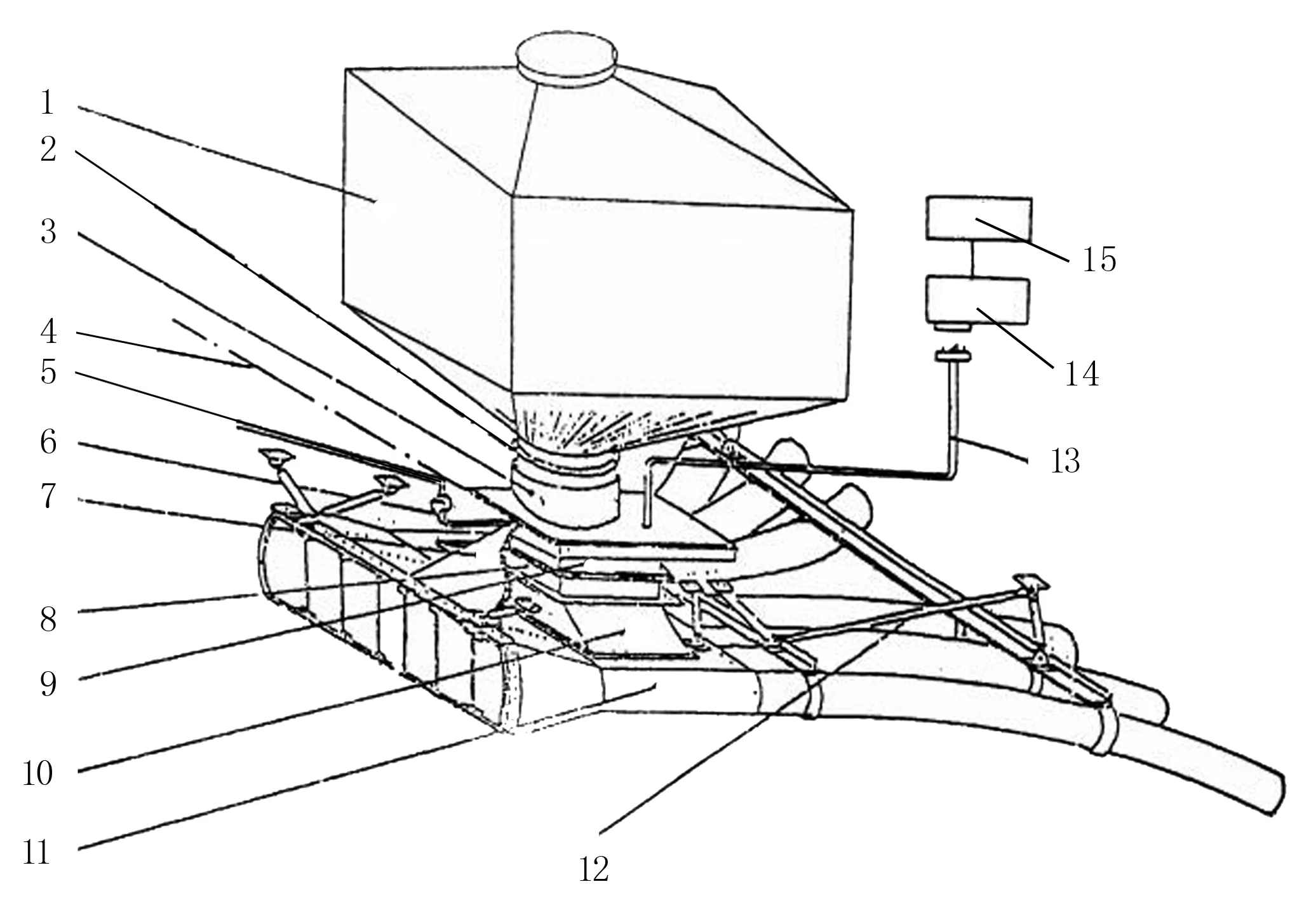
1.种子箱 2.机舱地板 3.引流口框 4.外蒙皮 5.飞机冷气源 6.冷气导管 7.整流罩 8.定量盘 9.下种开关 10.种子分配器 11.吹种风洞 12.拉杆 13.电缆 14.总操纵台 15.电源
图3 导管式航空撒播装置[61]
Fig.3 Pipeline airplane broadcaster
该装置的播量调控是通过定量盘和种子分配器实现的,通过电气操纵系统打开种箱的下种开关,将定量盘和种子分配器结合使种子按照比例吹进不同的导管内,形成具有一定宽度的撒播带。导管一端为进风口,另一端为气固混合出口,各导管呈锥形排列,引导颗粒流向不同的方向抛撒。该装置有自动显示系统,驾驶员可以随时调整撒播量。不足之处在于:所用的定量盘和分配器形成的间隔是固定的,不能灵活调节,对物料的粒型要求较高,种子撒播量的可调范围较小。
2.1.3 其他航空撒播装置
图4所示为国内早期使用的简易飞机撒播装置,由大型客机改装而成,在机舱内加装物料箱,播量调控由安装在机舱底部的控制阀门实现,控制阀门由驾驶员手动控制,且无专用的抛撒装置,从阀门流出的物料直接由高速气流吹散开。该撒播装置结构简单,撒播量手动控制,适合飞播种草等均匀度要求不高的作业,是我国早期开展飞播种草所用的主要装置[62]。

图4 简易的飞机撒播装置
有人驾驶固定翼飞机撒播作业时,主要依靠驾驶员与地面人员的配合,人为控制撒播变量,且飞机前进速度较快,很难及时调整撒播量。撒播装置结构简单,主要利用高速气流吹送物料颗粒,关于撒播装置的结构研究较少[63]。
2.2 无人直升机撒播技术
关于无人直升机撒播装置,国内外的研究已取得一些成果。2000年,日本采用在无人直升机上安装叶轮的方式撒播粒剂除草剂。工作时,叶轮上的叶片旋转,将粒剂从物料箱中携带出去并撒播在作物上[64]。目前,无人直升机撒播主要采用离心圆盘式撒播装置。罗锡文等(2014)研发了一种适用于无人机撒播作业的机载装置及撒播方法,该装置采用离心圆盘式播撒器,可挂载于无人直升机,通过移动物料箱出口处的挡板进行播量调控,通过旋转圆盘实现抛撒[65],通过远程控制系统控制物料的播撒作业。李遗(2016)发明了一种适用于超低空飞行器的肥料撒播装置,如图5所示。该撒播器由多旋翼低空飞行器挂载,播种施肥机构采用离心圆盘式,在物料箱底部设置控制开口大小的播量调节开关,但是无法实现实时变量调节,而且该装置采用半边抛撒,落种带呈扇形环状,易在前进方向上出现重播、漏播的现象。
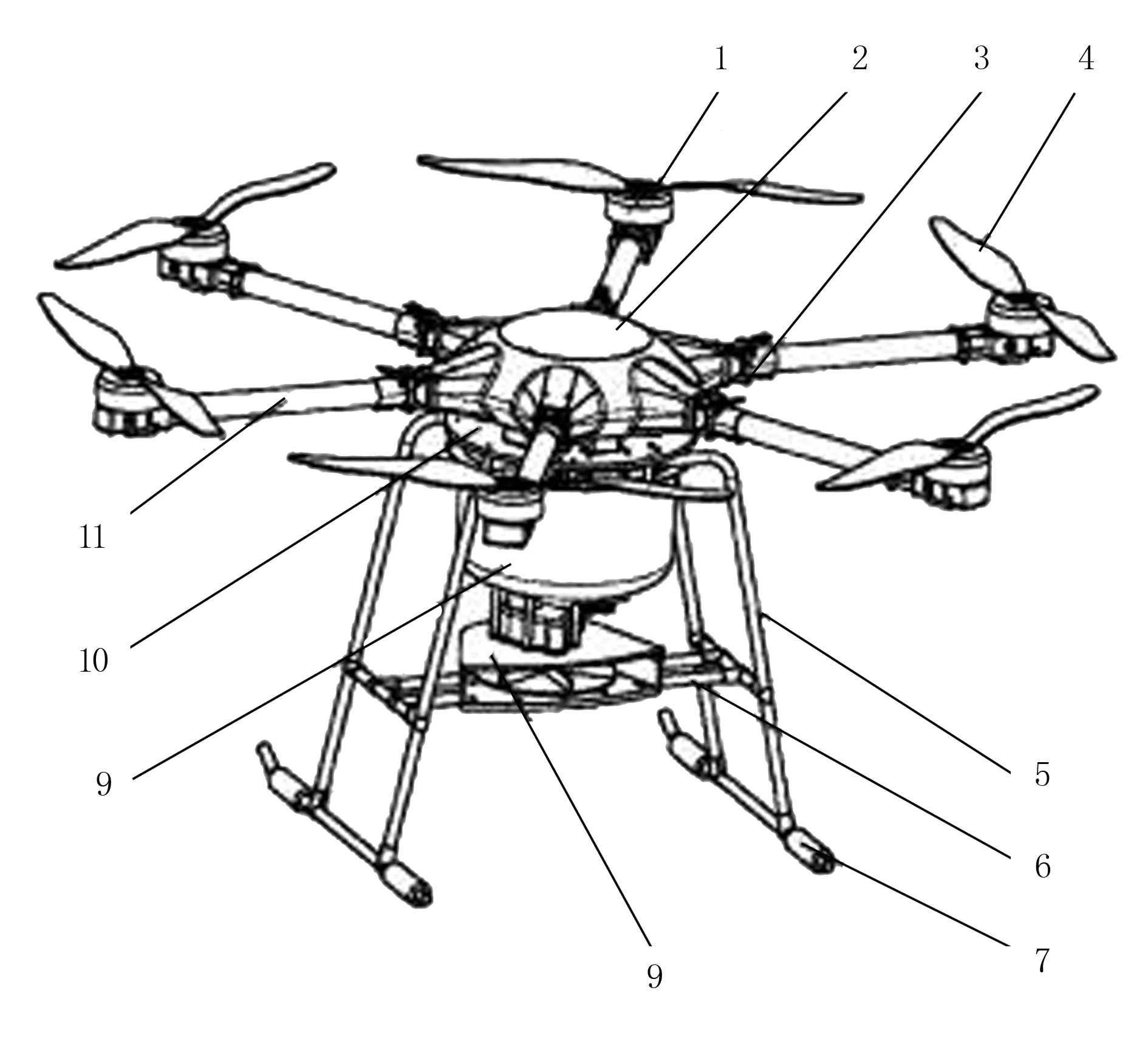
1.电机 2.机架主体 3.可折叠式管夹 4.螺旋桨 5.起落架 6.支撑架 7.缓冲垫 8.出料机构 9.播种施肥箱 10.支撑板 11.悬臂
包胜军等(2016)设计了一种无人直升机撒播装置,如图6所示。该撒播装置采用单旋翼无人直升机作为挂接载体,利用闸门的移动控制出料口大小,调节播量,利用离心圆盘抛撒物料颗粒,结构小巧,撒播幅宽大;但该撒播装置的不足之处在于利用闸门实现播量调控不够准确和连续,随着闸门的移动,容易出现从零物料下落突变成大流量物料下落的现象,难以精准控制,且该装置选用圆盘360°圆周抛撒,前进方向上落种区是较多环形落种带叠加形成的,重播和漏播较严重。
国内的一些无人机生产企业也陆续推出基于无人直升机的播撒装置,主要有“珠海羽人”“广州天翔”“高科新农”等单位,如广州天翔的撒肥播种机构[67]及深圳高科新农技术有限公司的物料自动播撒机构[68],珠海羽人采用的航空播撒装置为离心圆盘式。离心圆盘式利用舵机控制物料箱底部阀门,实现播量调控,会出现物料颗粒流量突变的情况,存在播种均匀性较差、播量控制不精准与高速旋转的圆盘易伤种等问题。
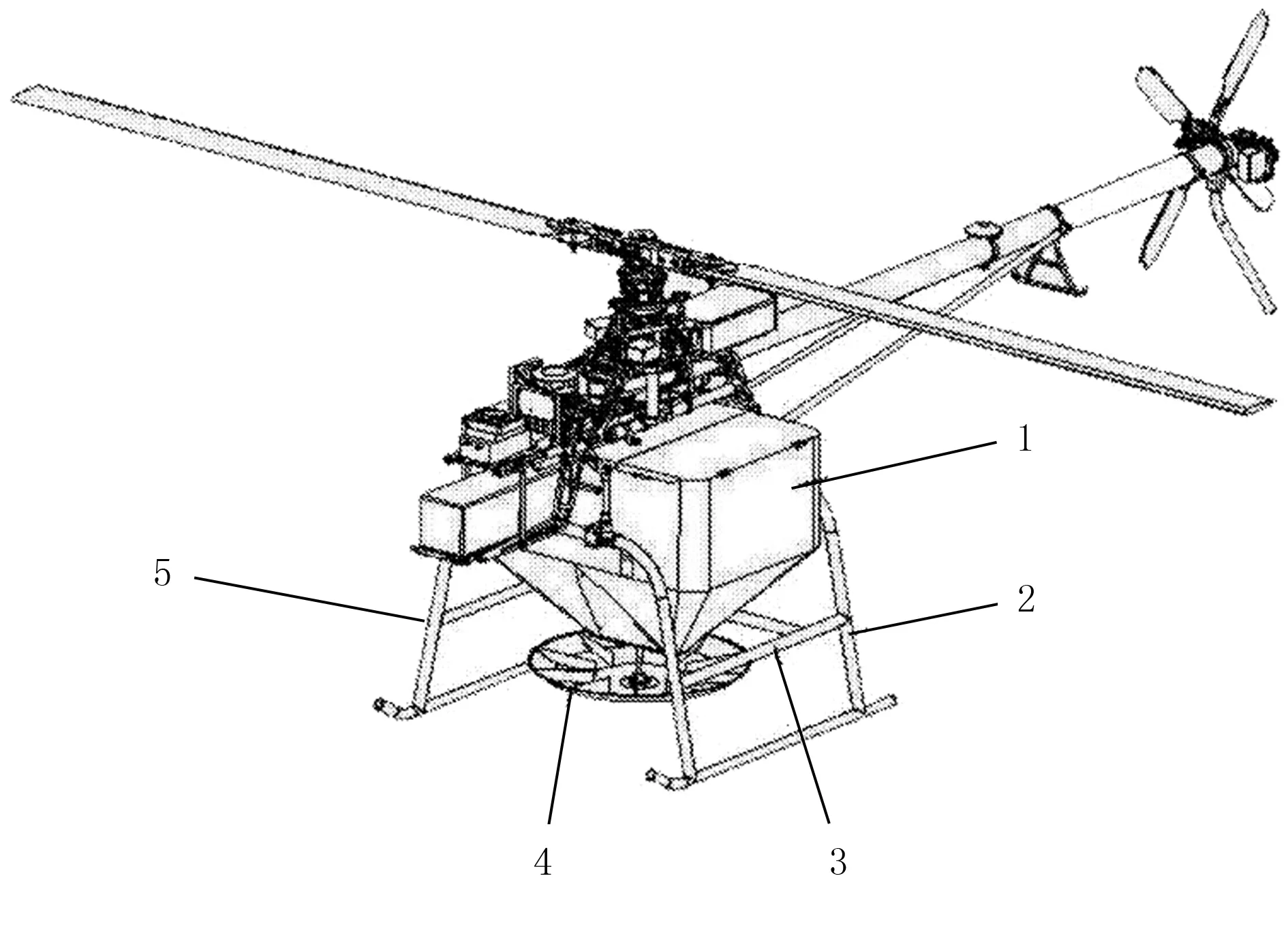
1.料桶 2.连接架 3.横杆 4.甩盘 5.支架
3 基于无人直升机的农业物料撒播探讨
3.1 无人直升机用于农业物料撒播的需求
与地面机械和有人驾驶农用飞机相比,无人直升机通过性好,可空中悬停,可远距离操控,可实现精准定位,结合空中遥感监测等技术,可实现按需变量作业,不需要专用的机场起降[70-71]。无人直升机亦可在深泥脚田块、池塘、沼泽、居民区等的小面积区域作业,是地面机械和有人驾驶飞机无法企及区域的播种作业的最佳补充,可实现较佳的农业物料投入量,且可实现播量控制,播撒均匀度高。
现有的航空撒播装置多应用于有人驾驶飞机,将机舱改装成简易的物料箱,底部加装控制阀门和简易风道,并无配套的专用撒播装置、撒播幅宽大,效率高;但撒播均匀性较差,且使用范围受限。目前,用于无人直升机的播撒装置主要由地面撒播机械改装而来,播量调控主要采用改变出料口大小的方式实现,难以实现播量连续可调,播量不可控,抛撒方式较多采用离心圆盘式。该方式形成的环形落种带重叠度较高,易出现重播现象。随着农业航空产业的发展,作为精准农业的一种作业形式[72-73],无人直升机作业的需求将会增大。
3.2 无人直升机用于农业物料撒播的关键问题
3.2.1 无人直升机作业平台的问题
无人直升机撒播属于低空离地播种作业,没有驾驶员,需要精准的导航系统和飞行控制系统,在无人直升机作业中控制飞行路线。目前,大多数无人直升机安装的导航系统和平衡控制系统精度较低,飞行姿态难以精准确定[74]。无人直升机的飞行控制模块撒播作业需要利用GNSS的定位,根据无人直升机的作业高度和作业速度自动调节播量,远距离操控无人直升机撒播作业,实现均匀撒播。
受载荷量和成本等因素的限制,目前无人直升机的结构多样化,物料箱的形状和容积不同,有效载荷量也各不相同,机身和旋翼的设计也各式各样,开展撒播相关的试验研究只能针对特定机型,设计特定结构的撒播装置,较难形成统一的撒播装置的结构参数,以及配合无人直升机作业的作业调节参数等。
3.2.2 无人直升机旋翼气流的影响
机身周围的风场是由无人机旋翼推动空气进行流动形成的,风场分布规律及风速大小等也是影响田间撒播作业效果的重要因素,因此需要了解并利用机身周围的风场分布。汪沛等人(2013)采用风场无线传感器网络测试系统设计了三向风速测量线阵和单向风速面阵,通过测量无人油动单旋翼直升机的风场,探究了该直升机作业时不同方向的风速和风场宽度的参数,用于指导后期作业[75]。胡炼等人(2014)设计了一种风场传感器网络测量系统,可在田间进行多点、多风向的风速测试,并进行了田间试验测量和分析,验证了该测试系统的可靠性[76]。李继宇等人(2016)通过采集并分析风速参数得到机身底部的三维空间方向上的风场宽度分布和风速大小,并建立风速的理想模型,发现在沿无人机飞行的方向上的风场分布存在“陡壁”现象,且沿无人机飞行方向左右对称[77]。对旋翼风场的研究可用于指导无人直升机撒播作业,对研究物料颗粒在分场中的轨迹变化有重要意义。
3.2.3 专用的无人直升机撒播装置
如前所述,目前的无人直升机机型丰富多样,基于无人直升机的撒播装置还处于试验阶段,技术尚未定性,撒播装置与无人直升机的技术融合较差,需加强对变量控制的研究。其次,农业物料种类很多,理化特性各异[78],撒播装置要有普适性,降低伤种率,需设计可快速拆卸的专用播量调控装置和播撒器,以适应一机多用的要求,降低播撒器的使用成本。
4 结语
1)通过对国内外现有播量调控技术和撒播技术进行综述,深入研究了已有技术的优缺点,对适用于无人直升机的农业物料播撒技术进行了探讨,找出了无人直升机用于农业物料播撒需要解决的关键问题,并提出了无人直升机撒播技术的研究方向。
2)实现无人直升机精准撒播,要综合考虑无人直升机作业状态和撒播器的变量调节,以提高无人直升机作业的稳定性和播撒的均匀性。无人直升机撒播装置在农业上的应用能够很好地推动精准农业的发展,具有重要的研究意义和实际应用价值。
3)利用农用无人直升机作业已成一种趋势,无人直升机撒播装置的研究是农业航空产业发展的重要方向,随着各项相关政策的出台和相关监管部门的完善,我国的航空撒播技术必将走向健康、高速和智能的发展道路,这将极大地促进精准农业的发展,加速我国农业现代化的进程。
猜你喜欢
东方少年(2022年27期)2022-11-24
中国农业文摘-农业工程(2022年5期)2022-11-23
新疆农机化(2022年1期)2022-03-02
农机质量与监督(2021年9期)2021-12-27
中国种业(2021年7期)2021-08-02
中国种业(2020年8期)2020-08-19
农药科学与管理(2019年9期)2019-11-23
农民致富之友(2019年30期)2019-10-21
河南农业·教育版(2019年7期)2019-09-10
种子科技(2017年7期)2017-01-13
