
跑步机速度跟踪算法在联合收割机运动控制中的应用
2018-08-10 02:25冯建富
农机化研究 2018年12期
冯建富
(内江职业技术学院,四川 内江 641000)
0 引言
随着自动控制技术的发展,现代跑步机越来越智能化,如可以追踪人体的位置和步调特征,通过控制跑步机的马达转速,调整跑步机运动参数和状态,抵消人体的任意运动,从而达到跑步机和人体保持步伐一致的状态。联合收割机是现代化农业作业过程中最常用的农机器具之一,其作业效率和质量主要与收割机前进速度和喂入速度有关。在喂入量比较大时,收割机行进速度过快很容易产生阻塞;在喂入量较小时,收割机速度过慢会大大降低收割机效率。如果设计一种反馈调节装置,可以有效地平衡喂入量和收割机行进速度,从而大大提高收割机的作业效率和质量,而跑步机速度追踪控制算法的引入有效地解决了这个问题。
1 跑步机速度跟踪及其在收割机速度控制中的应用
当前,国内外的专家和学者们对跑步机的速度自动控制进行了一些研究,也取得了一些成果。速度控制方法集中在对人体上使用检测装置,实时对人体的状态进行检测,将状态信息反馈给控制器,通过调整马达的转速将人体向着预定目标带动。但这些控制方法具有一定的弊端,如跑步机得脚板可以在任意时刻变化速度,从而产生振荡,使人体较难控制,最后影响人体的正常运动。
图1表示一款具有速度追踪和控制的智能跑步机。该平台通过球阵列地毯覆盖,是安装有转盘的线性跑步机,配备了用于线性和角运动两个致动装置,使其和人体的步态一致,达到反馈调节的目的。将这一原理也可以直接嫁接到收割机得速度控制过程中,影响收割机效率和质量的主要因素是喂入量、速度及运行轨迹的控制,可以参考跑步机得随动控制方法,其流程如图2所示。
收割机动作主要通过行进速度和喂入量的反馈信息来进行调节:当喂入量过大时,喂入量反馈信息被传送到控制器,控制器发出指令控制发动机降低转速,从而降低收割机的行进速度,使收割状态达到最佳;当喂入量较小时,控制器发出指令降低发动机转速,适当提高发动机的行进速度,以提高收割机效率。

图1 跑步机速度跟踪示意图Fig.1 Sketch diagram of speed tracking of running machine

图2 基于喂入量的收割机速度跟踪控制Fig.2 The speed tracking control of harvester based on feed quantity
2 收割机运动反馈控制算法


(1)
其中,v和w分别表示跑步机得线速度和角速度。
在通常情况下R≠0,则笛卡尔坐标系可以用极坐标系(R,α)来代替,则

(2)
在初始状态时,存在如下关系,即
θ+θw=θ(0)+θw(0)
(3)
在三维坐标空间里可以表示为
(4)
当人体在跑步机上移动时,则
(5)
其中,VW=(VW,X,VW,Y)、w分别表示人体行走绝对线速度和角速度;Ωw表示外界因素信号。假设没有外界干扰,即VW=Ωw=0,则跑步机的控制输出可表示为

(6)
当A=xcosθ+ysinθ≠0时,则
(7)
其中,v1=-k1x,v2=k2y,系数为ki(i=1,2)。假设人体站立的初始位置为(x1,y1),控制函数为x(t)=e-k1tx1和y(t)=e-k2ty1,同时假设k1=k2,则
(8)
所以,跑步机会通过参数调整将人体带回到原始位置,控制过程需要结合PID调节,其流程如图3所示。
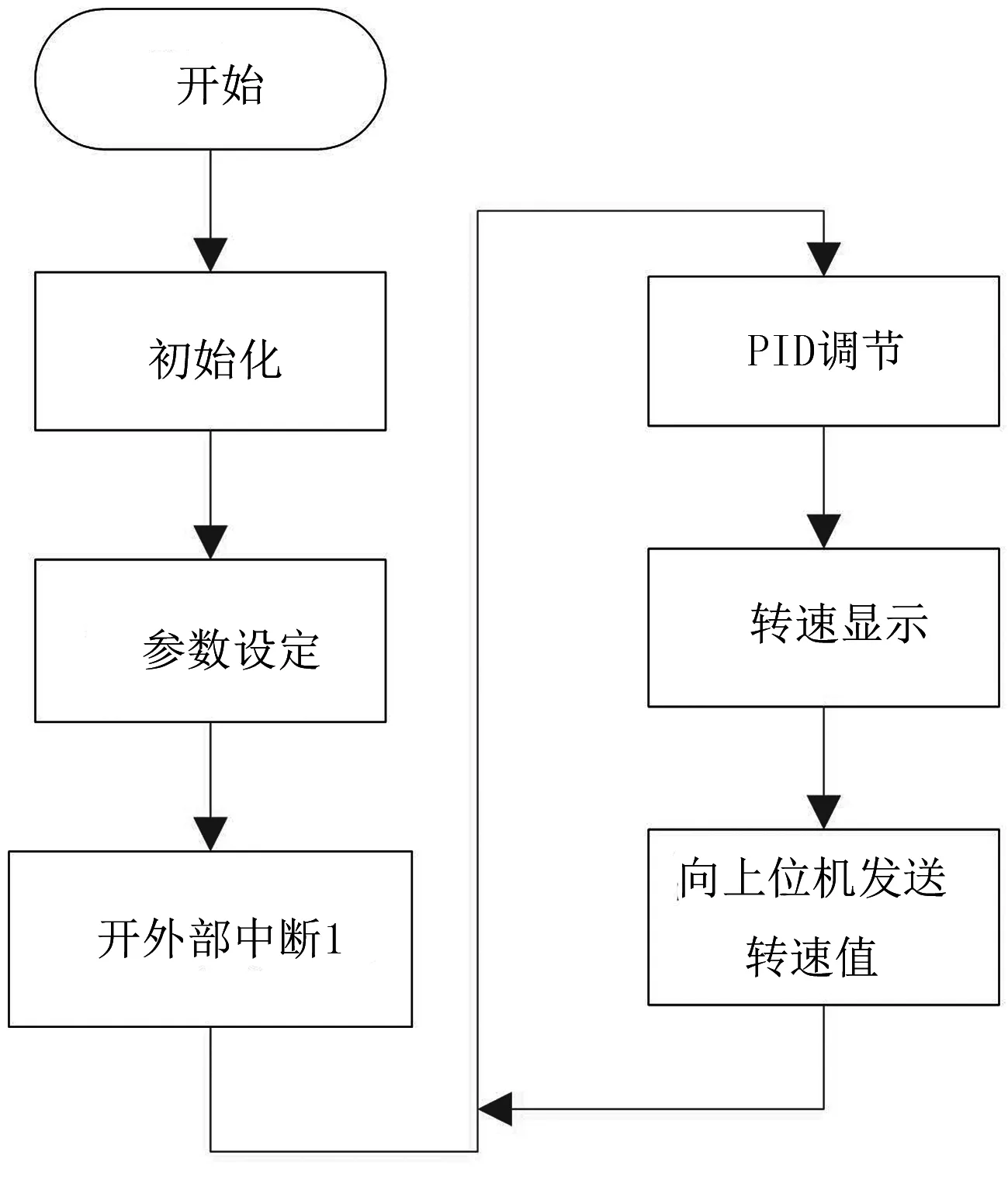
图3 主控制流程图Fig.3 The main control flow chart
其主程序主要包括系统初始化、参数设定、开外部中断1和PID调速程序。跑步机的速度追踪和控制主要依据人体状态信息的反馈,反馈调节可以采用PID控制器,其基本模型公式为
其中,Kp表示比例系数;Ti表示积分常数;TD表示微分常数;u0表示系统初值;ut表示系统输出值。将其进行离散化可得
其中,ek表示第k次采样时刻偏差值。
PID控制流程如图4所示。为了控制收割机的速度Uk,可以根据喂入量误差的大小e,将信息反馈给速度控制中心,通过不断地调整收割机得前进速度,使收割状态达到最佳。

图4 PID控制流程图Fig.4 The PID control flow chart
3 收割机运动控制测试
为了验证跑步机运动追踪控制算法在收割机运动控制系统中使用的可行性,以收割机喂入量反馈信息控制速度为例进行了试验验证,采用软件和硬件编程的方式,在收割机上应用了运动追踪控制算法。试验场景如图5所示。

图5 收割机运动控制系统实验Fig. 5 The experiment of harvester motion control system
为了验证运动追踪控制算法的可行性,主要以收割机喂入量和行进速度的反馈调节为例,重点对收割机的速度自适应调节和收割机运动轨迹控制进行了试验研究。通过试验测试,得到收割机运动速度控制图,如图6所示。

图6 收割机运动速度控制示意图Fig.6 The sketch diagram of speed control of harvester movement
在运动过程中,收割机可以根据喂入量自行调整行进速度,然后再将速度信息反馈给搅龙,以调整其旋转的角速度,使收割状态达到最佳。速度测试结果表明:速度超调时间较短,速度调节较快,且调整后的速度平稳,从而验证了算法的可靠性。
收割机运动轨迹控制示意图如图7所示。以相同的原理可以实现收割机轨迹的控制,在试验过程中将距离信息反馈给控制中心,从而可以使收割机自动的调整姿态,实现自主导航的功能,从而进一步提高收割机的自动化水平。

图7 收割机运动轨迹控制示意图Fig.7 The diagrammatic sketch of trajectory control of reaping machine
表1为速度调节的试验结果。测试结果表明:采用基于跑步机速度跟踪控制算法设计的收割机速度调节系统,其调节时间较短,误差较小,可以满足较高精度收割的作业需求,从而验证了该方案的可行性。
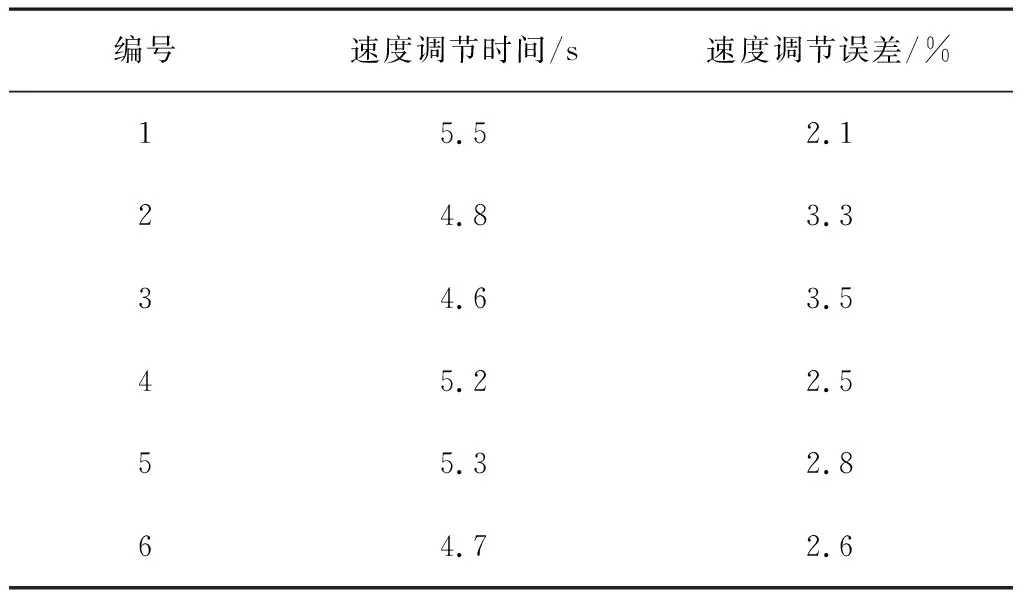
表1 速度调节控制结果统计Table 1 The statistics result of speed regulation control
4 结论
为了进一步提高联合收割机的机动性和智能化水平,将跑步机跟踪控制算法引入到了收割机运动控制系统中,通过喂入量的反馈调节,实现了联合收割机行进速度得自动调节,使收割机可以自行调节到最佳收割状态。为了验证该方法的可行性,对收割机运动控制系统进行了试验,结果表明:采用该套方案可以实现收割机行进速度的自动调节,并且调节时间短、反应速度快,调节误差低。要实现速度跟踪控制算法在收割机运动控制系统中切实可靠的运行,还需要进一步结合收割机作业环境及收割机的机械结构,对收割机进一步的优化,从而使该方案可以在实际生产中运用,提高收割机的作业水平。
猜你喜欢
农民致富之友(2020年20期)2020-07-18
今日农业(2019年11期)2019-08-15
农民致富之友(2018年7期)2018-05-04
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
创新作文(3-4年级)(2016年5期)2017-05-16
都市家教·下半月(2016年11期)2016-12-29
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年1期)2014-05-09
知识窗(2009年1期)2009-09-24
