
下肢康复机器人肌电感知与人机交互控制方法
2018-08-25 07:17张小栋陈江城
振动、测试与诊断 2018年4期
张小栋, 陈江城, 尹 贵
(1.西安交通大学陕西省智能机器人重点实验室 西安,710049) (2.西安交通大学机械工程学院 西安,710049)
1 问题的引出
随着人民生活水平的提高和社会老龄化进程的加剧,由脑卒中、脑外伤及脊髓损伤等中枢神经系统疾病造成的肢体残障人口迅速增长[1]。医学研究证实,及早与充分的运动训练对下肢偏瘫患者神经通路的重建和运动功能的恢复具有重要作用。下肢康复机器人把先进的机器人技术与康复医学结合,由机电设备辅助患者进行运动任务训练,为下肢运动障碍的患者提供精准的神经刺激,锻炼肌肉,恢复神经系统对下肢的控制,最终达到运动康复的目的[2-4]。下肢康复机器人不仅使医疗师从繁重的训练任务中解放出来,减小人员消耗,而且能够记录训练数据用于评估患者的状态,便于康复规律的设计与研究,缩短康复周期。它的研制有助于缓解我国医疗资源短缺与市场需求之间的矛盾,具有巨大的社会与经济价值。
下肢康复机器人的训练模式一般分为主动训练模式和被动训练模式[5-7],分别适用于患者的不同康复阶段。随着研究的深入,康复机器人的主动训练策略及选择性助力越来越受到重视,因此对于患者运动意图和运动能力的获取非常重要。在医疗师辅助训练中,医疗师通过语言、视觉及肢体触觉等手段获得患者的运动意图和运动能力信息,并依靠自身的经验指导和辅助患者完成运动任务,训练过程中体现了患者的自身运动能力和主动参与,如图1所示。
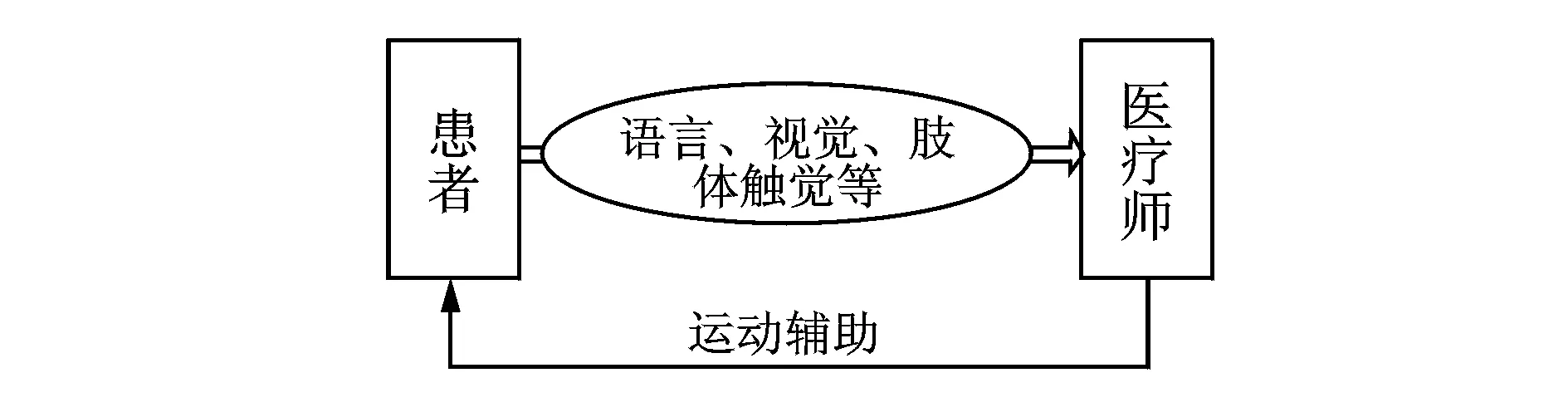
图1 传统人工辅助的交互方式Fig.1 Traditional manual-assisted interaction
对于下肢康复机器人来说,人类语言的多样性难以成为机器人与人之间的交互通道,机器视觉和触觉传感也无法获得患者全面的信息。康复机器人交互能力的不足,特别是由于缺少有效的运动感知和运动能力测评手段,直接影响运动训练当中患者的主动参与程度及机器人对患者辅助方式的决策和调控,是制约康复机器人康复能力提升的瓶颈问题。基于生物电的人机接口在人体与机器人之间建立了交流和控制通道,为下肢康复机器人的人机交互接口和交互控制技术研究提供了新的思路,如图2所示。
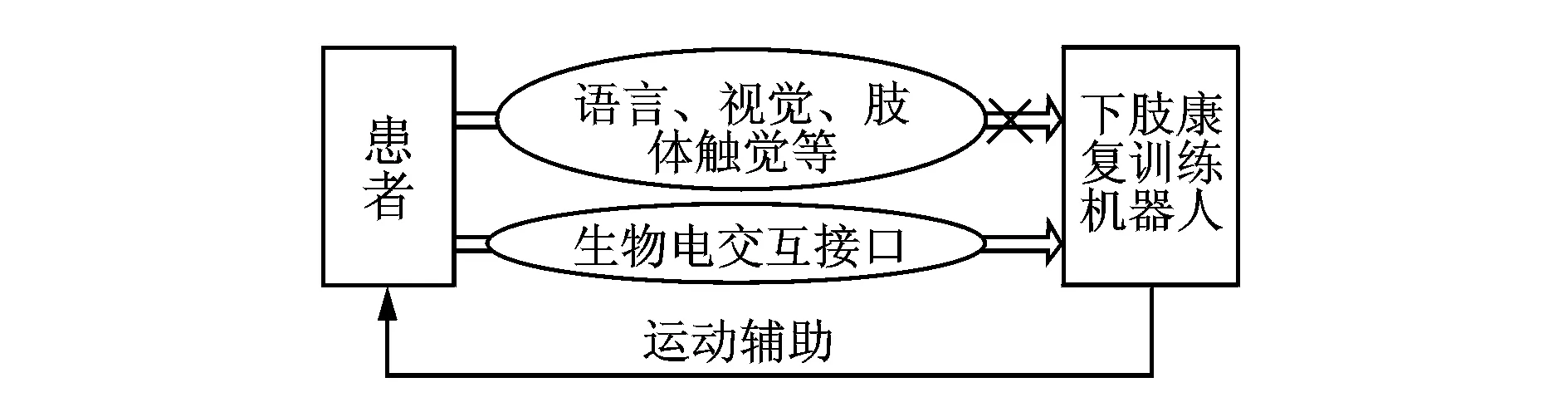
图2 基于生物电的人机交互方式Fig.2 Man-machine interaction based on sEMG
笔者回顾了下肢康复机器人及其人机交互控制方法的研究现状,提出了一种基于表面肌电信号的受试者运动状态的精密感知方法,深入讨论分析了下肢康复机器人的系统设计与人机交互控制方法,最后对下肢康复机器人的研究进行了总结与展望。
2 下肢康复机器人研究现状
2.1 下肢康复机器人分类及其简况
下肢康复机器人开始于20世纪90年代。直至本世纪初,已有多种下肢康复机器人的研究成果相继面世。根据结构上的不同,主要可以分为外骨骼式下肢康复机器人和脚踏板式下肢康复机器人[8]。
1999年,HOCOMA医疗器械公司和瑞士苏黎士联邦工业大学合作研制出名为LOKOMAT的外骨骼式下肢康复机器人[9]。经过不断改进,2005年又推出了最新的LOKOMAT机器人[10],外骨骼每一侧包括膝关节和髋关节2个自由度,由带有力传感器的线性驱动器驱动,同时外骨骼机械腿的尺寸可调,以适应不同身材的个体,此外还包括骨盆上下运动自由度,由平行四边形机构实现。另一款典型的外骨骼式下肢康复机器人是由荷兰Twente大学生物医学工程实验室开发的名为LOPES的外骨骼式步态康复机器人[11-12]。LOPES单腿在髋关节有2个自由度,在膝关节有1个自由度。
2000年,德国佛朗霍费尔自动化机器人研究中心和柏林慈善医科大学Hesse等共同开发的脚踏板式下肢康复机器人GTI Gait Trainer[13]主要由减重系统和脚踏板系统两部分组成。在此基础上,该团队于2003年又推出了新一代脚踏板式下肢康复机器人haptic walker[14]。
瑞士洛桑联邦理工学院与Swortec SA公司开发了一种名为MotionMaker的坐卧式下肢康复机器人[15]。MotionMaker由倾斜度可调的躺椅和外骨骼机械腿组成,每条外骨骼包括髋、膝和踝在矢状面上的3个自由度。此外,Swortec SA公司还开发了第2代名为WalkTrainer移动式下肢康复机器人[16]。WalkTrainer由移动架、骨盆矫形器、悬吊减重系统、两只机械腿和功能性电刺激仪组成。韩国先进科学与技术研究院也研制了名为WHERE I 和 WHERE II[17]的移动式步行康复机器人。
国内在下肢康复机器人系统研制方面也取得了一定的成果。哈尔滨工程大学研制的踏板式下肢康复机器人系统[18],包括步态发生机构、脚踏板姿态控制机构、框架和光杆导轨等部分。上海大学的钱晋武等开发的步态康复机器人,包括悬吊减重系统、外骨骼助行机械腿和跑步机,组成上与LOKOMAT类似。浙江大学机械电子控制工程研究所研制出了一种下肢外骨骼康复机器人[19],该机器人由跑步机、悬吊减重系统以及两条外骨骼机械腿组成,每条腿在髋关节和膝关节处各有1个屈伸自由度,采用直线驱动。西安交通大学智能机器人实验室研制了一种下肢外骨骼式康复机器人,并以此为平台,开展了基于生物电信号的康复机器人技术的研究。
目前,下肢康复训练复机器人仍然处于不断发展中,少数发达国家已投入临床应用,而我国的智能康复机器人基本还在实验室阶段。下肢康复机器人作为世界公认的具有较好训练效果的康复设备,大多医疗机构都有购买需求,但我国目前还是依赖进口,价格昂贵。因此,加快我国自主研发这种设备,掌握关键技术十分迫切。
2.2 下肢康复机器人交互控制技术研究现状
下肢康复机器人是典型的人机互动系统,其交互过程复杂,存在感知层、决策层和执行层多个层次的交互。因此,交互控制技术一直是下肢康复机器人的关键技术,也是直接影响康复机器人走向应用的难点。在早期的康复机器人中,一般采用的都是轨迹跟踪控制,无法体现患者主动运动的意图,这种控制策略适合早期被动的康复训练。为了实现患者主动协同,不断有新的控制策略被提出。目前,用于下肢康复机器人主动训练的控制方法主要有力/位混合控制。阻抗控制和基于生物电信号的控制等,其中前两者通过力/位检测感知患者的意图,可统称为基于力的交互控制方法。此外,为提高人机互动和康复效果,虚拟现实技术[20]和功能型电刺激技术[16]等逐渐被集成到康复机器人当中。
Bernhardt等[21]利用力/位混合控制在LOKOMAT平台上实现了人机协同的步态行走训练,提出该方法的目的是让患者实现自主导航训练,使患者在训练过程中产生主动力。
阻抗控制是目前康复机器人实现各种康复训练模式的普遍控制方法。阻抗控制方法强调康复机器人的主动柔顺,能够动态的调整机器人运动轨迹和人机作用力之间的关系,为患者创造一个安全、舒适的交互环境,避免患肢二次损伤。因此,阻抗控制被认为是目前最适合康复机器人控制的方法。将阻抗控制应用于康复训练外骨骼时,其主要思想是允许机器人在预定轨迹上下有一定量的偏离,而不是一个刚性的步态模式,偏离量的大小由患者的运动强度或人机交互力的大小决定。阻抗控制的实质就是将人机作用力转化为位置和速度的修正,阻抗方程描述了机器人运动轨迹偏差与人机作用力的关系,而人机作用力的大小直接反应了人的主动运动意图,因此阻抗控制一定程度上考虑了患者的主动参与。瑞士的LOKOMAT康复机器人和荷兰的LOPES都采取了阻抗控制策略。研究表明,根据患者的康复程度进行变阻抗控制能够获得更好的康复效果,因此如何获取患者的运动能力以及变阻抗策略是目前阻抗控制的重要研究方向。
基于生物电的下肢康复机器人交互控制是目前的研究热点,通过生物电信号获取患者的运动意图,将意图信息用于运动决策,以提高患者的主动参与程度。现有的下肢康复机器人大多采用人机作用力信息来获取患者的运动意图,然后设计相应的交互控制策略,但由于力信号的滞后性以及康复过程期间人机力交互机理的研究缺乏,基于力交互的方法目前只能一定程度上解决人机之间的安全柔顺性问题。相比之下,基于生物电的交互凸显了其特有的优势,而且前期大量关于生物电人机接口技术的研究也为其在下肢康复机器人领域奠定了基础,是目前的发展趋势。目前,能够用于下肢康复机器人中的生物电信号主要有两种:表面肌电信号(surface electromyography,简称sEMG)和脑电信号(electroencephalogram, 简称EEG)[22],两种均为非侵入式测量,可操作性强。表面肌电信号对人体运动信息的分辨率更高,也相对更加稳定。美国麻省理工大学的MIT-MANUS康复机器人通过收集特定肌肉上的EMG信号并进行处理,当被处理的信号超过一定阈值时触发辅助,作为给患者的奖励[23],相同的肌电生物反馈方法也被用于上肢的康复训练[24-25]。日本HAL外骨骼机器人中,将表面肌电信号强度与关节力矩大小用一阶线性模型进行回归,通过表面肌电信号提取穿戴者运动意图和估计关节力矩,实现了助行外骨骼机器人的控制[26-27]。德国工业大学Fleischer等[28-29]通过研究EMG 信号与运动关节之间联系,用于控制外骨骼。2014年6月,我国天津大学和天津市人民医院发布了双方共同研制的人工神经康复机器人系统“神工一号”,其中关键技术之一是利用神经肌肉电刺激,模拟神经冲动的电刺激引起肌肉产生主动收缩,带动骨骼和关节产生自主动作,与人体自主运动原理一致。另外,表面肌电信号反映肌肉活动的疲劳程度、肌力水平、肌肉激活模式、运动单位兴奋传导速度及多肌群协调性等肌肉活动变化规律。通过正常表面肌电信号与脑卒中瘫痪病人的表面肌电信号分析比较,完成对下肢训练的康复评定,从而制定科学的康复治疗方案,达到合理治疗和训练的目的。
3 基于表面肌电信号的受试者运动状态精细感知方法
从研究现状分析可知,高性能的人机交互技术是目前下肢康复机器人的研究重点。为提高康复效率,应强调训练过程中患者的自主引导和机器人的选择性运动辅助,因此,人机交互接口需要解决人体运动状态的精细感知,主要包括两个关键问题:a. 人体运动意图的实时准确可靠提取,这是实现患者自主引导训练的前提;b. 患者实际运动能力的定量评定,这是进行按需辅助决策的保证。表面肌电信号蕴含着以上两方面的信息,下面给出通过表面肌电信号解码所需信息的方法。
3.1 sEMG的采集与特征提取
表面肌电信号是肌肉在神经控制下活动时先于运动形成的生物电信号,幅值在0.01~10 mV之间,能量集中于0~500 Hz之间,其变化与肌肉活动水平和功能状态有关,蕴含人体运动意图信息。在神经系统损伤导致的下肢肢体残障人员中,有许多属于偏瘫患者,即有一侧肢体运动功能完好,通过电极能够记录健全的表面肌电信号,而且随着运动能力的复苏,残障侧肢体的肌电活动也会重新形成。人体表面肌电信号微弱且易受干扰,测量难度较大,但随着传感技术的发展,已有许多表面肌电采集系统应用于临床与康复领域。表面肌电信号采集系统主要由电极、放大器、屏蔽线、采集卡和信号处理与显示装置等组成,如图3所示。关于表面肌电信号采集具体流程可以参考文献[30]的标准执行。

图3 表面肌电信号采集系统Fig.3 Surface EMG signal acquisition system
对于表面肌电信号的特征提取主要包括时域法、频域法、时频域分析法以及非线性动力学方法。其中,时域方法将表面肌电信号看成时间的函数,不需要任何转换而直接从时间序列中获得信号特征,具有较好的实时性,因此被广泛使用。这里给出表面肌电信号强度特征提取方法,如图4所示。首先,对于原始表面肌电信号会存在很多噪声和干扰,其主要包括采集设备固有噪声、周围噪声干扰、50 Hz工频干扰以及移动伪迹噪声等,信噪比低,需要对其进行滤波和伪迹消除。根据表面肌电信号有用频率范围为20~500 Hz,采用零滞后的四阶巴特沃斯滤波器对其进行滤波,通过工频陷波方法消除50 Hz工频干扰。在噪声消除基础上,通过全波整流与低通滤波,可获得表面肌电信号的强度特征序列。
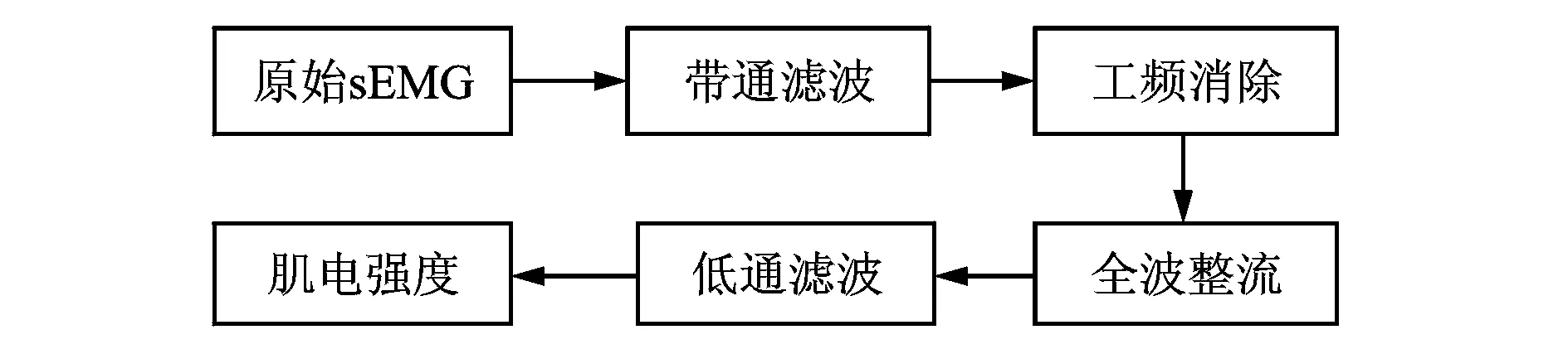
图4 表面肌电信号强度特征提取方法Fig.4 Feature extraction method for surface EMG signal
3.2 基于sEMG的受试者步态事件识别
下肢康复机器人控制算法的设计一般都是基于人机动力学模型进行的,步态训练中,受训者与机器人共同完成步态运动,一个步态周期包括了摆动和支撑两个阶段,约分别占步态周期的60%和40%,如图5所示,而在两个不同的阶段具有不同的约束和自由度,即描述其运动的动力学模型形式也不同,需要设计不同的控制规律。因此,支撑与摆动事件的准确识别是实现控制策略切换和步态安全稳定过渡的重要保障。
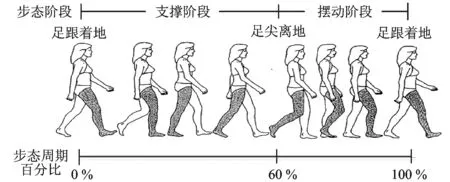
图5 人体步态周期划分Fig.5 Human gait cycle and its division
研究发现,骨骼肌的活动阶段与步态周期之间存在确定的关系,而骨骼肌活动及其变化信息最终反映在肌电信号的强度变化中,可以通过表面肌电信号的幅值和幅值变化描述。因此,通过提取表面肌电信号的活动强度(幅值)及变化的特征信息,建立其与步态阶段之间的关系,采用自适应模糊神经网络,如图6所示,可实现基于表面肌电信号的摆动、支撑阶段实时识别,详细方法见文献[31]。
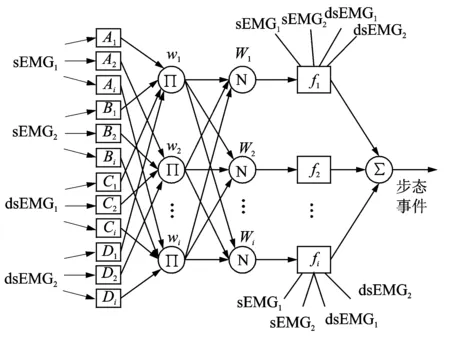
图6 基于表面肌电信号的步态事件识别Fig.6 Surface EMG based gait recognition
3.3 基于sEMG的受试者下肢关节角度连续解码
患者运动意图的识别是实现康复机器人主动训练的重要前提。近年来,国内外已有不少关于利用表面肌电信号进行肢体运动信息解码的研究,包括运动状态辨识和运动量连续解码[32]。在下肢康复机器人中,患者的运动意图和目标可以通过关节角度的连续变化进行描述,因此只要利用表面肌电信号对关节连续运动角度进行解码,便能获得患者期望的运动轨迹。
单一通道的表面肌电信号反映特定肌肉的工作过程,而人体下肢运动是多个肌群协同工作的结果。然而,多路表面肌电信号之间存在信息冗余,且数据维数过高增加了后期识别过程中数据处理的复杂度,同时影响关节角度的识别精度。因此,如何从复杂的、多通道的表面肌电信号中提取连续的、鲁棒的和无冗余信息的信号特征是问题关键。常用的维数约简方法,如主成分分析、线性判别分析、基于核运算的方法以及一些流形学习方法,都是在满足一定的几何约束下实现的,无法自适应高维数据内部特征。为此,笔者提出了一种基于深度置信网络的多路表面肌电信号维数约简方法,自适应的学习出多路表面肌电信号的最优特征,同时通过BP网络建立表面肌电信号特征与下肢关节角度之间的回归模型,有效提高了关节角度的解码精度,如图7所示[33-34]。

图7 基于sEMG的受试者下肢关节角度连续解码Fig.7 Surface EMG based continuous estimation of human lower limb joint angles
3.4 基于sEMG的受试者下肢关节力矩估计
下肢康复机器人的按需辅助对患者的运动康复具有重要意义,而按需辅助的前提是要对患者的运动能力进行实时评估。骨骼肌是人体运动的主要动力源,在神经系统调控下收缩,牵引骨骼和关节运动,因此通过运动中骨骼肌收缩力检测可以感知人体的运动能力。目前,直接测量体内肌肉力大小是不现实的,通过表面肌电感知肌力和关节力矩是一种可行的方法[35]。
研究表明,产生相同的肌肉力在不同的运动任务下肌电活动模式是不一样的,而且不是简单的线性关系,若要保证预测模型的精度及在任意运动下都有效,所建立的模型必须能反映运动系统的解剖结构和生理特点。目前,对骨骼肌的生物力学特性进行深入研究,主要是基于Hill提出的三元素模型,模型中一些肌纤维的力学特性是通过离体实验测量得到的,没有考虑肌肉收缩的微观特性,不能描述活体肌肉完整生物力学过程。
笔者从骨骼肌的微观力学机制入手,构建人体下肢肌骨系统正向生物力学模型,实现了人体下肢关节力矩的表面肌电信号动态解码,为下肢康复机器人的患者主动运动能力定量评定、实现患者按需辅助控制奠定基础。如图8所示,基本过程为:首先,根据骨骼肌激活过程,基于分子马达理论,建立骨骼肌收缩微观生物力学模型;其次,基于骨骼肌激活过程和骨骼肌微观力学特性,分别建立骨骼肌收缩的生物电调控(激励)模型和骨骼肌宏观力学模型,在此基础上,建立肌肉力到关节力矩的转换模型,进而建立神经(sEMG)-肌肉-骨骼运动的正向生物力学模型;最后,进行模型标定,详见文献[36-38]。
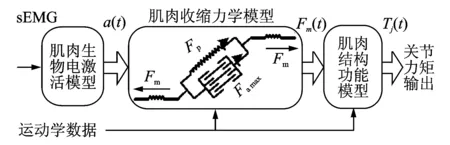
图8 基于sEMG的受试者下肢关节力矩估计Fig.8 Surface EMG based joint torque estimation of human lower limb
4 下肢康复机器人的人机交互控制方法
下肢康复机器人的人机交互控制策略应与运动再学习理论结合,患者在恢复早期,无法产生主动运动,需要在下肢康复机器人的带动下进行预定步态轨迹的被动训练,在中后期训练中,应充分发挥患者的主动积极性以及机器人对患者的按需辅助。基于力交互的患者主动训练能使机器人对患者的运动产生顺从,在一定程度上体现患者的主动意图,但是实际上既定的运动轨迹很难与患者的主动意图保持同步,更重要的是一旦过度顺从,还会造成运动失败甚至伤害。此外,基于阻抗的控制虽然具有柔顺作用,但由于人机交互过程的复杂性,患者的阻抗特性时刻发生变化,无法对力进行准确控制,因此不能根据患者的实际需求给予辅助。本节在表面肌电感知方法研究的基础上,针对下肢一侧瘫痪的患者,给出下肢康复机器人人机交互控制方法。
4.1 下肢康复机器人的系统设计
下肢康复机器人是一个典型的生、机、电集成系统,根据研究需要,设计开发了一种下肢康复机器人系统,如图9所示。系统包括外骨骼机械本体、悬吊减重系统、跑步机、控制卡、交流伺服驱动系统、表面肌电采集系统、力矩传感器、角度传感器和计算机等。外骨骼机械本体以可穿戴和人机运动相容性为原则,进行结构和功能的仿生设计。外骨骼机械本体由骨盆支撑板和两条外骨骼机械腿组成[39],每侧髋关节包含2个自由度,其中屈/伸为主动自由度,内收/外展为被动自由度,膝关节1个主动自由度,实现膝关节屈/伸运动。对于主动自由度,由伺服电动机驱动滚珠丝杆旋转,从而迫使滚珠丝杆螺母沿丝杆往复直线运动,经由曲柄滑块机构以实现螺母的直线运动转换成关节的旋转运动。髋关节的外展/内收为被动自由度,为了平衡外骨骼机械腿自身向内(内收方向)的旋转力矩,使用弹簧压缩缸支撑,弹簧压缩缸中弹簧长度可调,以调整弹簧支撑力的大小。髋关节的内收/外展自由度使得身体重心的左右移动,即骨盆的左右移动得以实现。在身材兼容性设计方面,为了满足不同身高患者使用,外骨骼机械腿的大腿杆、小腿杆长度可无级调节。

图9 下肢康复机器人系统Fig.9 Robotic system of lower limb rehabilitation
下肢康复机器人控制系统总体架构如图10所示。控制系统采用上下两级控制架构,上位机接收各种传感器数据,包括人体表面肌电信号、下肢康复机器人的关节角度信号和扭矩信号,并完成患者运动意图和运动能力的感知计算以及各关节电机的位置、速度或力矩指令值的计算。多轴运动控制卡接收上位机发出的控制指令,并对其进行解释,以要求的位置、速度和力控制伺服电机运动,上位机与多轴运动控制卡之间通过PCI总线进行通讯。
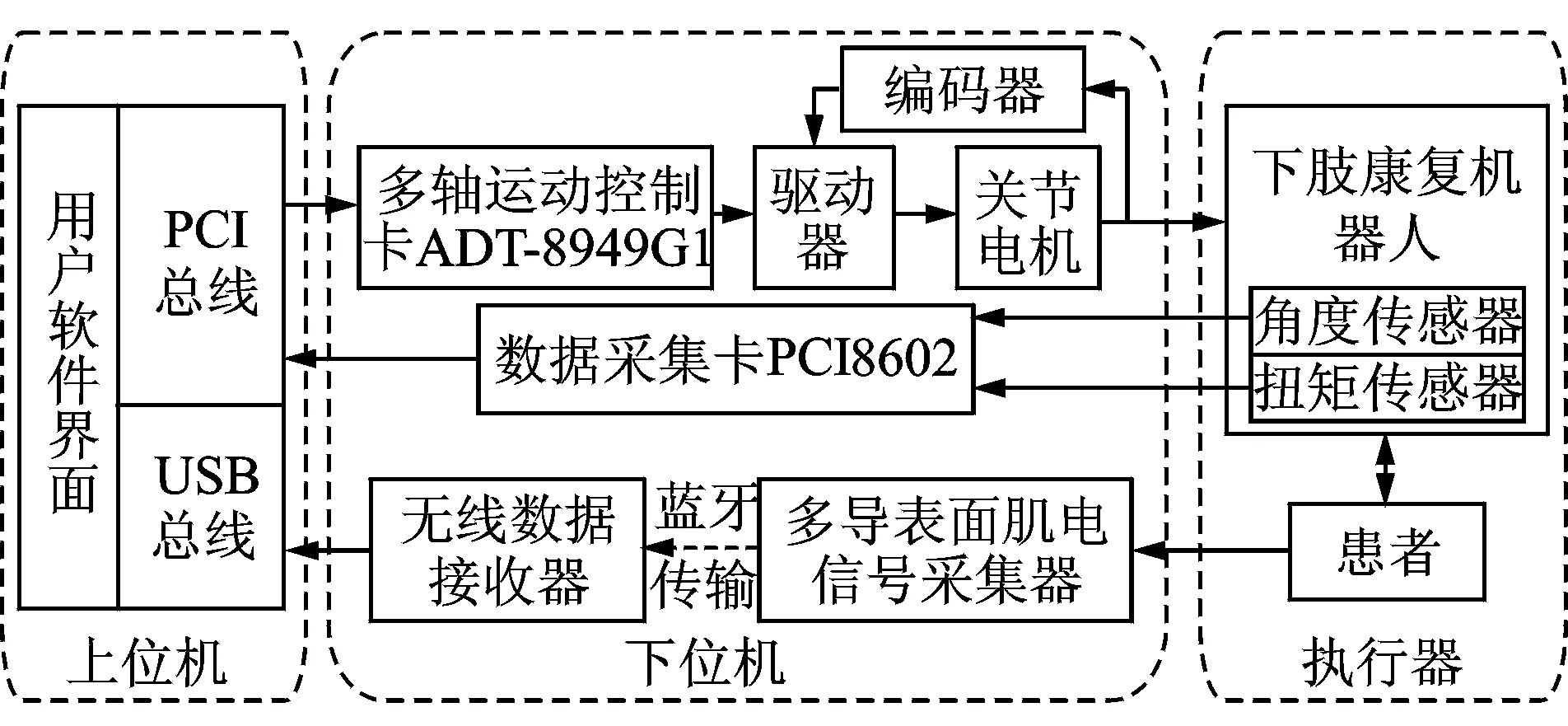
图10 下肢康复机器人控制系统架构Fig.10 Control system architecture of lower limb rehabilitation robot
4.2 基于sEMG的人机交互控制
基于表面肌电的人机交互控制方法如图11所示。其基本思想是:利用表面肌电信号蕴含肌肉的活动状态和患者康复程度的信息,以及先于力和运动产生的特点,一方面通过健康肢体表面肌电信号对患者运动意图进行预测,实时生成符合患者意愿的关节角度运动轨迹θd,保证机器人运动与患者运动意图同步,即同步主动;另一方面,通过患肢表面肌电信号估计由患者自身肌肉收缩产生的主动关节力矩TH,对患者运动能力进行评估,然后通过人机系统逆动力学实时推导对机器人输出力矩进行跟踪控制目标,达到辅助力的自适应。此外,由于支撑阶段时系统受到跑步机的作用力难以准确获得,利用逆动力学推导机器人应提供的关节力矩TR不准确,因此在支撑阶段采用位置控制方法。
基于表面肌电的人机交互控制策略主要特点是:a.实时的人机交互在减重步态训练过程中,整个控制系统的输入为患者实时的目标运动轨迹,而非既定轨迹,因此理想情况下只要按照输入的期望轨迹运动,患者就会感觉自然舒适,不需要在机器人的控制中进行主动柔顺或轨迹自适应调整;b.在辅助力控制中对患者的自身运动能力进行评估,然后以人机系统达到目标运动对机器人驱动力进行控制,即人机之间进行任务分配,以充分考虑患者的运动能力;c.通过步态快速检测实现力控制和位置控制模式的切换,在控制算法性能良好的情况下,能够保证关节运动角度的连续平滑;d.该方法主要是针对下肢单侧瘫痪患者提出的,即根据运动对称的原则,运动目标的检测采用健康侧肢体的表面肌电信号,保证在力矩控制下也不会出现不正常的步态模式,关节力矩的预测采用患肢的表面肌电信号。
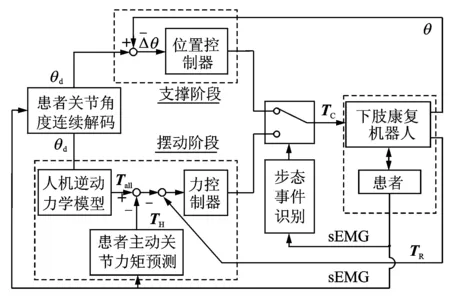
图11 基于表面肌电的人机交互控制Fig.11 Surface EMG based interactive control
5 结论与展望
目前,对于下肢运动障碍患者的康复训练多以简易的、被动式的康复设备为主。基于表面肌电信号感知的人机交互技术用于下肢康复机器人是一种潮流,通过表面肌电信号的解析,不仅能够实现患者意图驱动的运动模式,而且能够根据患者的运动能力动态调整辅助力度,实现按需辅助训练。笔者深入研究了基于表面肌电信号的人体步态事件、关节角度以及关节力矩信息的解码方法,取得的主要研究成果和结论如下。
1) 提出了表面肌电快速识别人体步态事件的方法,通过自适应模糊神经网络实现支撑和摆动两个步态阶段的快速识别。实验结果表明,该方法的的识别正确率达95.3%,而且对于步态之间的表面肌电信号差异具有较强的鲁棒性。
2) 在关节角度解码方面,提出了表面肌电连续解码人体下肢关节运动角度的方法,通过受限玻尔兹曼机的深度网络对多路表面肌电信号进行非线性降维,利用BP 神经网络建立了最优表面肌电信号特征与下肢矢状面关节角度的非线性回归模型,实现了髋关节和膝关节矢状面角度的连续估计。多名健康对象的实验结果表明:所提方法提取的信号特征信息优于传统的主成分分析方法,能够大大提高表面肌电信号解码关节角度精度。
3) 在关节力矩定量解码预测方面,提出了表面肌电定量预测人体下肢主动关节力矩的方法。建立了从表面肌电信号到肌肉收缩力,再到关节力矩的肌骨系统全过程生物力学模型,最终实现了动态关节力矩的定量预测。
以此为基础,兼顾康复训练的患者主动及机器人按需辅助要求,深入讨论了下肢康复机器人的系统设计及其基于表面肌电感知的人机交互控制方法。然而,该方向仍有许多问题还需要进一步探索与研究,主要包括以下方面。
1) 在下肢康复机器人表面肌电感知方面,表面肌电信号存在较大的随机性和个体差异性,运动意图和运动能力提取的准确性仍然是挑战。目前多以正常人为对象,对于肌肉疲劳和不同肌电异常等因素对解码模型的影响需要进一步探索,并寻找模型补偿与修正的方法。例如,解码模型均需要进行训练或标定,后期可以考虑利用患者数据进行模型训练和标定,同时也可以研究异常肌肉定位方法,以确定有效的表面肌电信号采集通道用于运动感知等。
2) 进一步提高系统的响应速度。必须意识到,在实际存在直接物理接触的人机交互过程中,运动滞后会使人机交互环境发生变化,患者的运动意图和运动状态也会随着交互状态发生改变,若测控系统延迟,难以给予患者理想的运动刺激。
3) 为进一步提高下肢康复机器人的人机交互性能,基于表面肌电信号的人机交互方式可与其他交互方式结合,比如通过虚拟现实技术为患者提供视觉反馈等。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
成都信息工程大学学报(2021年4期)2021-11-22
小哥白尼(野生动物)(2021年12期)2021-03-29
轻兵器(2019年5期)2019-06-21
科技传播(2019年24期)2019-06-15
电子制作(2018年18期)2018-11-14
农村青少年科学探究(2018年6期)2018-09-04
北京航空航天大学学报(2017年9期)2017-12-18
大众健康(2016年3期)2016-05-31
