
基于增益自补偿的光纤陀螺瞬态噪声抑制方法
2018-08-27 01:34吴军伟缪玲娟李福胜
中国惯性技术学报 2018年3期
吴军伟,缪玲娟,沈 军,李福胜
(1. 北京理工大学 自动化学院,北京 100081;2. 北京自动化控制设备研究所,北京 100074)
光纤陀螺(Fiber Optic Gyroscope)是一种敏感载体相对于惯性空间角运动的全固态惯性仪表,成本低、启动快、重量轻、使用方便,在海、陆、空、天、潜等军民领域得到了广泛应用[1-2]。经过多年的发展,光纤陀螺的原理研究和技术应用已非常成熟。小型化是光纤陀螺的主要发展方向之一,近年来得到了迅猛发展,成为各种弹、箭等武备系统及无人机、稳定平台等民用系统控制部件的首选,主要用于改善载体自动控制的品质,增加稳定性[3]。
控制系统应用中,由于光纤陀螺的固有特性,解调端去死区方波的加入影响了光纤陀螺输出的瞬态噪声,对相位滞后也有一定的影响。瞬态噪声决定了控制精度,相位滞后一定程度上反映了载体输入角速度的跟踪效率[4]。一般来说,控制精度的要求高于控制效率。瞬态噪声变大将导致控制精度降低,需要根据控制系统的具体要求,设定不同的瞬态噪声门限,来确保系统的控制精度[5]。本文主要研究增益自补偿方法对光纤陀螺瞬态噪声的抑制作用。
1 光纤陀螺的闭环环节分析
1.1 闭环带宽与死区
根据图1所示数字闭环光纤陀螺功能模块的组成[6-8],在建立每一个功能部分数学模型的基础上,得到数字闭环光纤陀螺整体的动态模型。图1中表示输入角速率,表示去死区方波信号,表示去死区补偿方波信号。模型中其他各参数的物理涵义参见表1。

图1 数字闭环光纤陀螺动态模型Fig.1 Dynamic model of digital closed-loop FOG

表1 模型参数的物理涵义Tab.1 Physical meanings of model parameters
通过等效近似与参数合并,可将模型简化成图2的形式。其中,为前向通道增益,等于光纤陀螺的开环标度因数;积分控制系数;为反馈通道增益,等于光纤陀螺闭环标度因数的倒数。
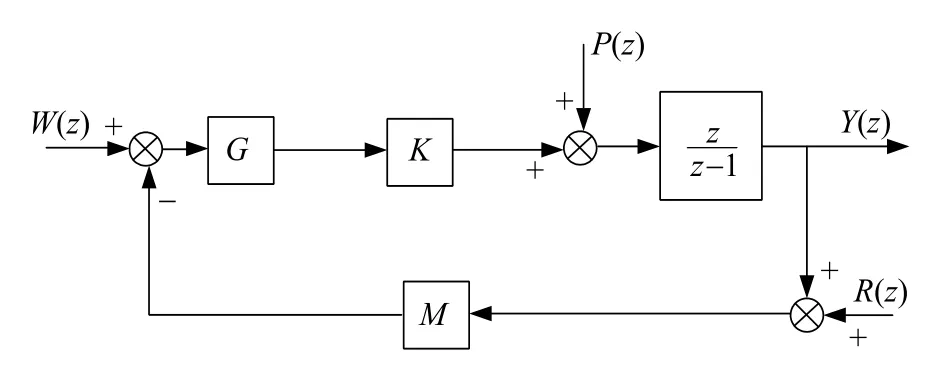
图2 数字闭环光纤陀螺的简化数学模型Fig.2 Simplified mathematical model of digital closed-loop FOG




“死区”效应是光纤陀螺应用必须解决的问题之一[9-11]。“方波抖动法”是目前最常用的去“死区”方法。但是在各种环境条件下,受光纤陀螺增益变化的影响,预设的固定的补偿值并不能完全抵消去死区方波抖动信号对应在光纤陀螺输出端解调信号中的分量,表现为光纤陀螺输出噪声明显变大,甚至淹没了光纤陀螺敏感到的角速率信号,是光纤陀螺重要的瞬态噪声源。因此,需要采取措施去除由去死区方波引入的瞬态噪声。
从“抖动”法去死区的原理可以看出,确保去死区方波信号及其补偿信号不影响光纤陀螺最终测量结果的条件是为闭环光纤陀螺的增益。受电磁场、温度变化等外界因素的影响,在光纤陀螺的实际应用场景中,光路中光学器件及熔点的损耗、光源出纤功率等参数会发生变化,从而导致前向通道增益发生变化[12]。结合式(2)(3)进行分析,当随时间发生缓慢变化时,去死区方波在光纤陀螺输出端的响应不受影响,而去死区补偿信号光纤陀螺输出端的响应将随着的变化而变化。此时,将不能互相抵消,从而给光纤陀螺测量结果引入一个测量误差,表现为在光纤陀螺输出信号上叠加了一个与同频的周期性振荡信号。假定的幅度为± 0.1 (°)/s,则在增益增大20%时,叠加在输出上的误差信号振荡幅度可达± 0.17 (°)/s。从瞬时角度分析,该误差信号增大了光纤陀螺的测量噪声。
1.2 瞬态噪声
光纤陀螺瞬态噪声对控制平台角速率的影响可近似地表示为:

令s= jω,则:

可以得出系统角度输出的传递函数为:

系统角度输出的均方差为:

2 增益自补偿方法
2.1 增益的补偿方案
2.2 理论分析
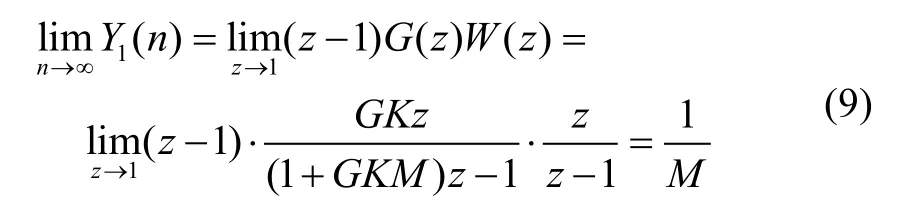



图3 闭环光纤陀螺增益自补偿系统框图Fig.3 Block diagram of closed-loop FOG gain self-compensation system
3 试验验证
在上述理论分析的基础上,验证了增益自补偿方法对幅值衰减、相位滞后及瞬态噪声的抑制情况,试验结果如下。
3.1 增益自补偿效果验证
选用了一套散装的单轴光纤陀螺来验证增益自补偿的效果,通过改变SLD光源的出纤光功率,来改变前向增益系数。减小SLD光源的出纤光功率,用示波器监测探测器输出的直流电压,从2.5 V逐渐减小至1.9 V,分别测试光纤陀螺在带增益自补偿和不带增益自补偿两种状态下的光纤陀螺输出,测试结果如图4所示。可以看出:在光纤陀螺不带增益自补偿的状态下,光纤陀螺输出噪声随着的减小而逐渐增大;光纤陀螺使用增益自补偿方法后,光纤陀螺输出噪声随着的变化未发生明显变化。

图4 增益补偿前后光纤陀螺输出曲线对比Fig.4 Comparison of FOG output curves before and after gain compensation

图5 增益补偿前光纤陀螺测试数据FFT分析结果Fig.5 FFT analysis result of FOG output before gaining compensation

图6 增益补偿后光纤陀螺测试数据FFT分析结果Fig.6 FFT analysis result of FOG output after gaining compensation
3.2 瞬态噪声
将光纤陀螺固定在稳定台体上,敏感轴指天,记录光纤陀螺输出,采样周期为0.25 ms。统计光纤陀螺输出瞬态噪声的峰峰值。
从图7的试验结果可以看出,采用增益自补偿方法后的瞬态噪声幅值为0.36 (°)/s,有效抑制了去死区方波的影响,满足了不大于0.5 (°)/s的设计目标。

图7 瞬态噪声测试结果Fig.7 Test result of transient noise
3.3 幅值衰减和相位滞后
将光纤陀螺固定在角振动台上,敏感轴指天,角振动台的振动频率范围设定为1~200 Hz。设置A、B两通道,分别记录光纤陀螺输出和角振动台模拟控制信号输出。比较A、B通道的测试结果,分别计算不同频率点下的相位滞后和幅值衰减,试验验证结果统计如表2所示。
从表2的试验结果可以看出,采用增益自补偿方法后,光纤陀螺输出的幅值衰减和相位滞后特性得到改善,能够满足使用要求,同时验证了增益自补偿方法能够在一定程度上减小去死区方波引起的相位滞后。

表2 试验验证结果统计Tab.2 Statistic of test result
4 结 论
瞬态噪声决定了载体的控制精度,相位滞后反映了载体的跟踪效率,既相辅相成又互有制约。本文分析了由于死区补偿带来的光纤陀螺瞬态噪声,探讨了光纤陀螺相位滞后及瞬态噪声的关系,提出了基于增益自补偿方法的光纤陀螺瞬态噪声抑制方法。根据设定的相位滞后和瞬态噪声要求,在理论分析的基础上,验证了增益自补偿方法的有效性,为光纤陀螺在稳定平台及随动控制等领域的应用提供了设计参考。
猜你喜欢
仪表技术与传感器(2022年6期)2022-07-27
防爆电机(2020年3期)2020-11-06
中华建设(2019年3期)2019-07-24
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年8期)2017-12-20
科技经济市场(2017年3期)2017-06-15
航空兵器(2016年5期)2016-12-10
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
中国高新技术企业(2015年23期)2015-06-24
空间控制技术与应用(2015年1期)2015-06-05
