
基于带通滤波器的惯性元件随机噪声逼真模拟方法
2018-08-27 00:59贾瑞才乔立伟
中国惯性技术学报 2018年3期
王 珏,贾瑞才,乔立伟
(1. 中国电子科技集团公司第五十四研究所,石家庄 050081;2. 卫星导航系统与装备技术国家重点实验室,石家庄 050081;3. 天津航海仪器研究所,天津 300131)
采用模拟数据进行惯导算法研究与测试,在以下场合显得尤为重要:一是高动态、高过载、高速载体惯导算法研究与测试;二是不同精度元件的惯性导航算法研究与测试,如激光惯导算法、光纤惯导算法、微机械惯导算法;三是方案可行性与指标论证。如果没有逼真的惯性元件数据模拟方法,将会付出昂贵代价,因此研究惯性元件噪声逼近模拟方法具有重要意义。
不同于系统误差,惯性元件随机噪声无法标定与补偿,是影响惯性导航结果的主要误差源。在随机误差建模与参数辨识方面,一阶马尔科夫过程被应用于描述惯性元件零偏不稳定性噪声、比例因子等随机误差[1-2]。Sameh研究了不同层次AR模型,并分别用静态和动态惯性数据验证了AR模型效果[3]。应用自相关函数和功率谱密度函数可以从时域和频域计算误差统计特性,但很难将不同随机误差分离开来。由于 Allan方差与频率特定关系,Allan方差被广泛应用于惯性元件随机误差建模,其能够对不同随机误差进行辨识[3-5]。
惯性元件(陀螺)随机误差主要包括角度随机游走、零偏不稳定性(又称闪变噪声)、角速率随机游走等[6-7]。多种噪声在合成时直接相加,未考虑各种噪声的频率分布特性,因此存在模拟数据与设置数据误差较大的问题。针对该问题,根据各随机噪声频率分布,基于带通滤波器,提出了一种基于带通滤波器的惯性元件随机噪声逼真模拟方法,并通过实验得到了验证。
1 惯性元件随机噪声模型
惯性元件包括陀螺与加速度计,本文主要介绍陀螺随机噪声模拟方法,加速度计与之类似。陀螺随机误差由量化噪声、 噪声、角速度随机游走、角度随机游走、零偏不稳定性和速率斜坡等组成。除此之外还存在指数相关噪声、正弦噪声等[8-10]。影响中长时间导航精度的随机误差主要包括零偏不稳定性噪声、角度随机游走噪声、角速度随机游走噪声。
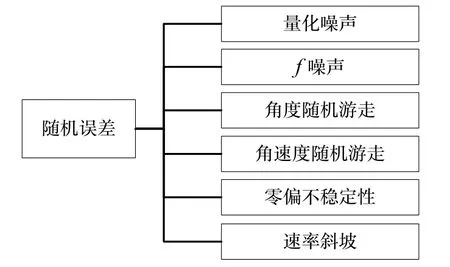
图1 陀螺常见随机噪声类型Fig.1 Some types of gyro random noises
量化噪声是一切量化操作所固有的噪声。只要进行数字化编码采样,传感器输出的理想值与量化值之间就必然会存在微小的差别,量化噪声代表了传感器检测的最小分辨率水平。量化噪声具有很宽的带宽,属于高频噪声,在实际应用中可进行低通滤波处理或大部分被导航姿态积分环节所消除,因此一般对长时间惯导精度影响不大。
角度随机游走是宽带角速度白噪声积分的结果,即陀螺从零时刻起累积的总角增量误差表现为随机游走,而每一时刻等效角速度误差表现为白噪声。角度随机游走功率谱为常值其中N为随机游走系数。
角速率随机游走是宽带角加速率白噪声积分的结果,即陀螺角加速率误差表现为白噪声,而角速率误差表现为随机游走。角速率随机游走功率谱为为角速率随机游走系数。
零偏不稳定性噪声又称为闪变噪声或1/f噪声,其功率谱密度与频率成反比,其具有低频特性,在陀螺输出中表现为零偏随时间的缓慢波动。功率谱密度为其中B为零偏不稳定性系数。
速率斜坡由系统误差引起,比如环境温度的缓慢变化。通过严格的环境控制或引入补偿机制可以降低此类误差,它更像确定性误差,而不是随机误差。
2 基于带通滤波器的随机噪声模拟方法
图2示出了这三类主要随机噪声序列的逼真模拟流程。
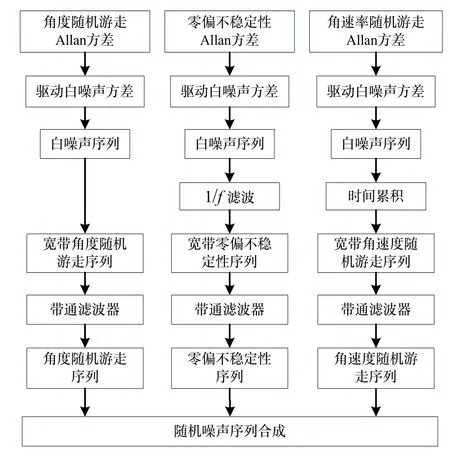
图2 陀螺随机噪声逼真模拟流程图Fig.2 Procedure of gyro random noise simulation
角度随机游走噪声序列模拟过程:首先依据角度随机游走方差,计算角度随机游走驱动白噪声方差,如式(1)所示,角度随机游走方差既可通过辨识实测惯性元件数据得到[11],还可以通过产品手册得到;然后基于驱动白噪声方差生成白噪声序列,宽带角度随机游走在任意时刻体现为白噪声。

零偏不稳定性噪声序列产生过程:首先依据零偏不稳定性方差,计算零偏不稳定驱动白噪声方差,如式(2)所示,零偏不稳定性方差既可通过辨识实测惯性元件数据得到,还可通过产品手册得到;然后基于驱动白噪声方差生成白噪声序列;最后将白噪声序列经傅里叶变换至频域,并经滤波处理,再逆变换,得到宽带零偏不稳定噪声序列。

角速度随机游走噪声序列产生过程:首先依据角速率随机游走方差,计算角速率随机游走驱动白噪声方差,如式(3)所示。角速度随机游走方差既可通过辨识实测惯性元件数据得到,还可通过产品手册得到。然后基于驱动白噪声方差生成白噪声序列。最后将白噪声序列按时间积分即得到宽带角速率随机游走噪声序列。
上述方法生成的随机噪声序列均具有宽频特性,然而事实上,角度随机游走具有中高频特性,角速度随机游走具有中低频特性,零偏不稳定性具有中频特性。如图3所示,由Allan方差与功率谱关系可知,角度随机游走Allan方差双对数图曲线斜率为–1/2,带宽范围为零偏不稳定性Allan方差双对数图曲线斜率为 0,带宽范围为,角速率随机游走Allan方差双对数曲线斜率为1/2,带宽范围为

图3 随机噪声频率分布示意图Fig.3 Sketch graph of stochastic noise frequency distribution
针对随机噪声频谱分布特性,采用带通滤波器分别对上述三种宽带随机噪声序列进行滤波,生成具有一定带宽的角度随机游走序列、零偏不稳定性噪声序列、角速率随机游走序列。最后将滤波后三类随机噪声序列进行累加,合成陀螺主要随机噪声序列。
3 实验结果与分析
3.1 实验过程
以MEMS惯性测量单元Adis16480中的陀螺为模拟对象,通过静态实验、动态实验两种方式验证本方法的性能。Adis16480是美国ADI公司采用MEMS工艺研制的较高精度微惯性测量单元,陀螺动态范围达到 450 (°)/s,陀螺零偏不稳定性误差可达 6.25 (°)/h,角随机游走误差优于,可应用于工业机器人、移动平台、无人车辆等姿态与方位测量。
1)静态实验过程
首先,Adis16480静止放置,采集静态数据,采样频率60 Hz,时间长度通过Allan方差辨识其随机误差参数,识别各误差参数带宽范围,作为数值模拟的参数输入。
然后,分别应用本文方法与传统方法模拟随机噪声序列,并应用Allan方差辨识模拟噪声参数。
最后,分析实验结果。
2)动态实验过程
首先,将Adis16480安装于三轴速率转台,设置转台外环以20 (°)/s速率旋转,采集动态数据,采样频率60 Hz,时间长度并通过Allan方差辨识随机误差与误差带宽。
然后,根据转台运动指令,分别应用本文方法与传统方法模拟随机噪声序列,并采用 Allan方差辨识模拟数据的噪声。
最后,分析实验结果。
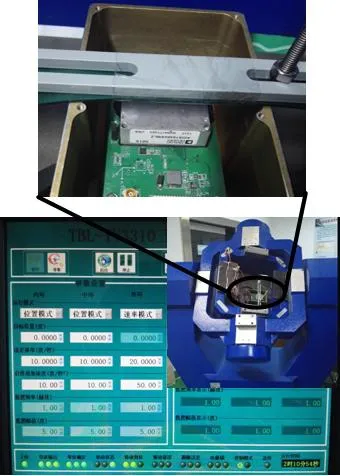
图4 动态实验图片Fig.4 Dynamic experimental graph
3.2 实验结果与分析
1)静态实验结果与分析
应用 Allan方差法分析实测静态数据,得到双对数图,如图5所示,由图中可辨识出角度随机游走方差为带宽0.3~30 Hz,零偏不稳定性方差为 3.2×10–3(°)/s,带宽 0.05~0.125 Hz。由于数据采集时间偏短,图上无法辨识出角速率随机游走噪声的 Allan方差值。为验证角速率随机游走噪声模拟方法有效性,后续模拟实验时将该噪声 Allan方差值设为 1.2×10–3(°)/(s×s1/2),带宽 0.005~0.01 Hz。
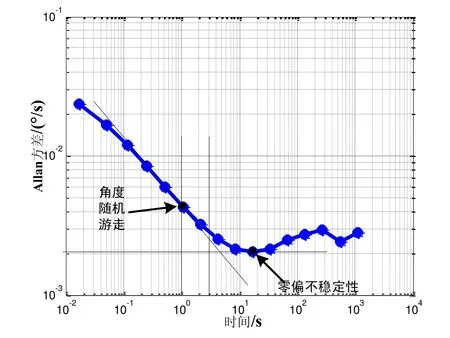
图5 静态实验Adis16480 Allan方差双对数曲线Fig.5 Allan variance double logarithmic graph of Adis16480 by static test
相对于传统方法,本文方法的创新点在于将带通滤波器应用于模拟过程,因此在实验结果图中将传统方法模拟结果标记为滤波前结果,将本文方法模拟结果标记为滤波后结果,如图6~8所示。由图6~8可以看出:滤波前三类随机噪声为宽带分布,角度/角速度随机游走噪声以及零偏不稳定性噪声三者相互影响,尤其是前两者对零偏不稳定性噪声影响较大;滤波后三类随机噪声在带宽内与滤波前类似,而在带宽外噪声则迅速减小,避免了对其它噪声的影响。
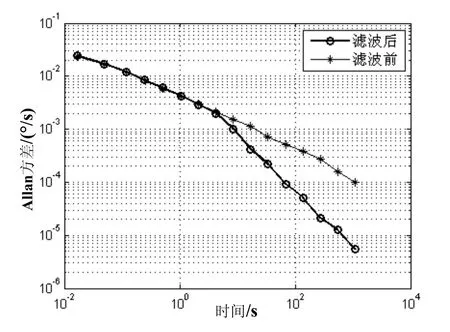
图6 角度随机游走Allan方差双对数图Fig.6 Allan variance double logarithmic graph of angle random walk
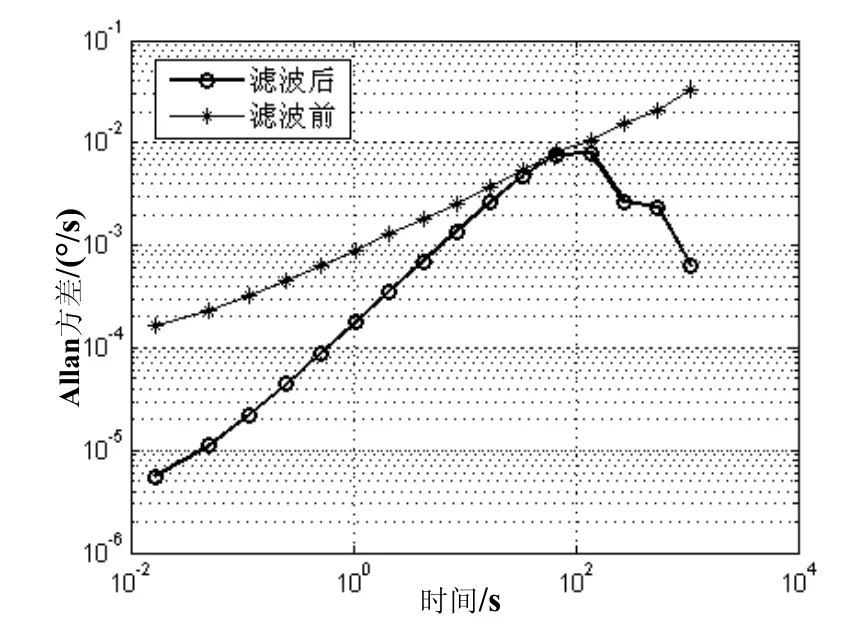
图7 角速度随机游走Allan方差双对数图Fig.7 Allan variance double logarithmic graph of angular rate random walk
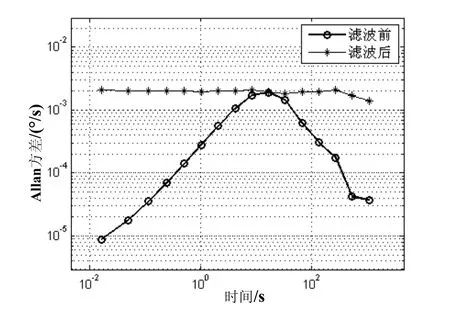
图8 零偏不稳定性噪声Allan方差图Fig.8 Allan variance graph of bias instability noise
三类随机噪声合成后的Allan方差曲线如图9所示。由图9可以定性看出:滤波前后Allan方差曲线差异较大,尤其是低频、中频区域差别较大;滤波后曲线与图5的 Adis16480实测数据Allan方差曲线的逼真度更高。应用 Allan方差对滤波前后合成的模拟数据进行分析,得到的各项随机噪声模拟值误差统计情况如表1所示。由表1可知,本文方法在保证角度/角速率随机游走模拟精度同时,大幅提高零偏不稳定性噪声模拟精度,改善幅度达到50%。
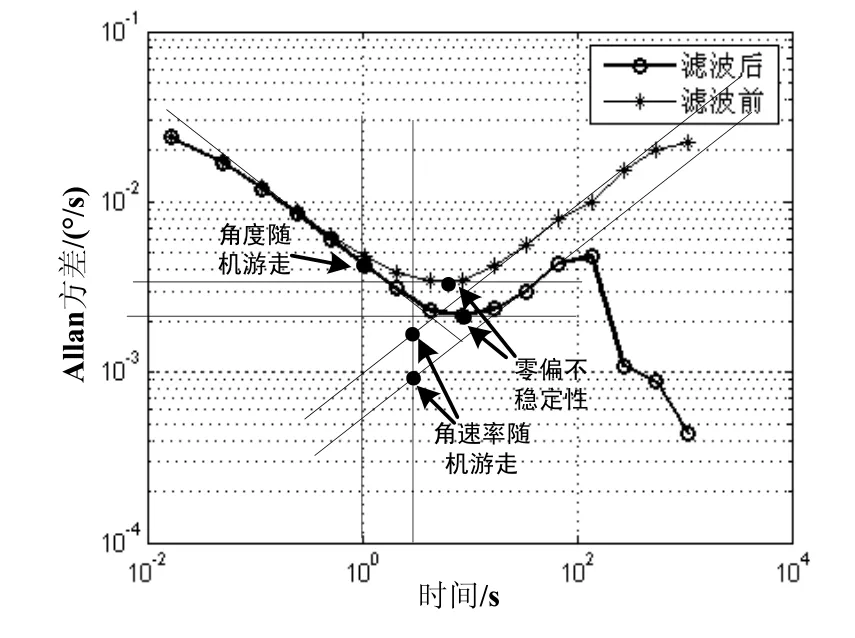
图9 静态模拟数值Allan方差双对数曲线Fig.9 Allan variance double logarithmic graph of static data simulated
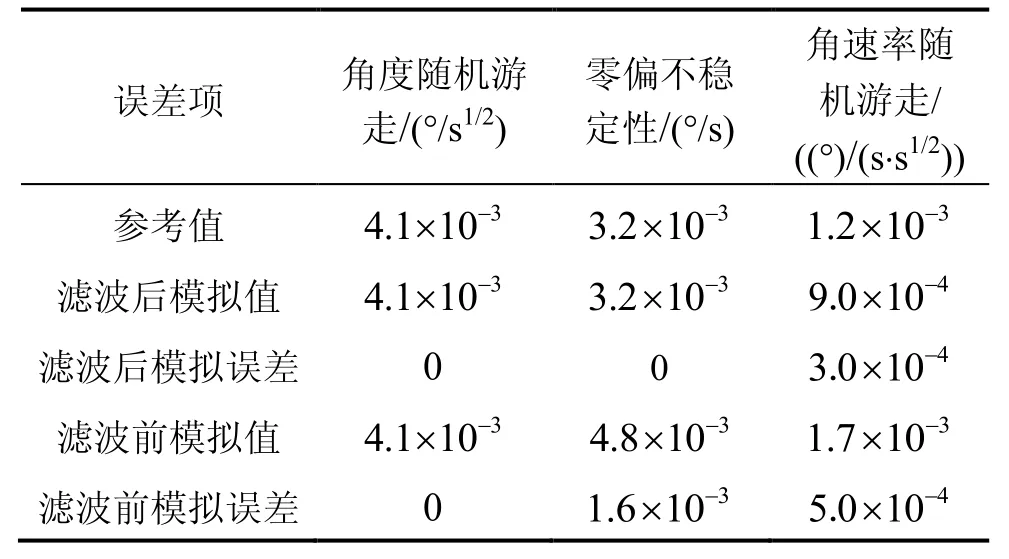
表1 静态实验误差统计表Tab.1 Error statistics of static experiment
2)动态实验结果与分析
陀螺动态数据如图10所示,应用Allan方差法分析,双对数图如图11所示。由图11可辨识出角度随机游走方差为带宽0.3~30 Hz,零偏不稳定性方差为 2.4×10–3(°)/s,带宽 0.017~0.125 Hz。图11中无法辨识出角速率随机游走噪声的 Allan方差值,为验证角速率随机游走噪声模拟方法有效性,后续模拟实验时将该噪声 Allan方差值设为带宽0.005~0.01 Hz。
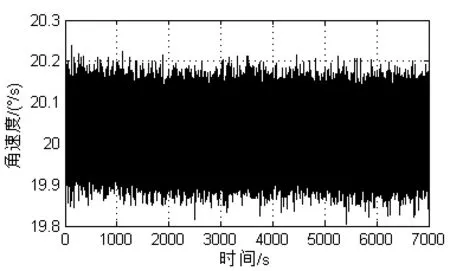
图10 Adis16480陀螺数据序列图Fig.10 Gyro data series of Adis16480
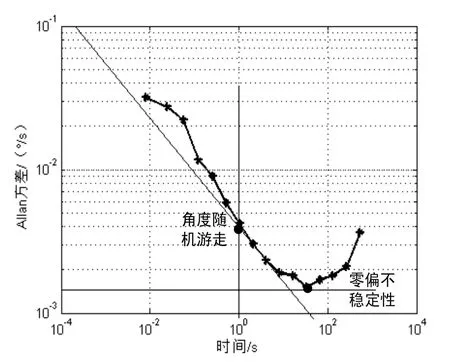
图11 动态实验Adis16480 Allan方差双对数曲线Fig.11 Allan variance double logarithmic graph of Adis16480 by dynamic test
处理过程与静态实验过程类似。基于辨识参数与转台运动指令,分别采用本文方法与传统方法模拟陀螺动态数据序列,并采用 Allan方差辨识模拟数据误差参数,结果如图12所示。由图12可知,滤波前后Allan方差曲线差异较大,尤其是低频、中频区域,滤波后曲线与实测数据Allan方差曲线更相近。
动态实验各项随机噪声模拟值误差统计情况如表2所示。与静态实验结果类似,本文方法在保证角度/角速率随机游走模拟精度同时,大幅提高零偏不稳定性噪声模拟精度,改善幅度超过50%。
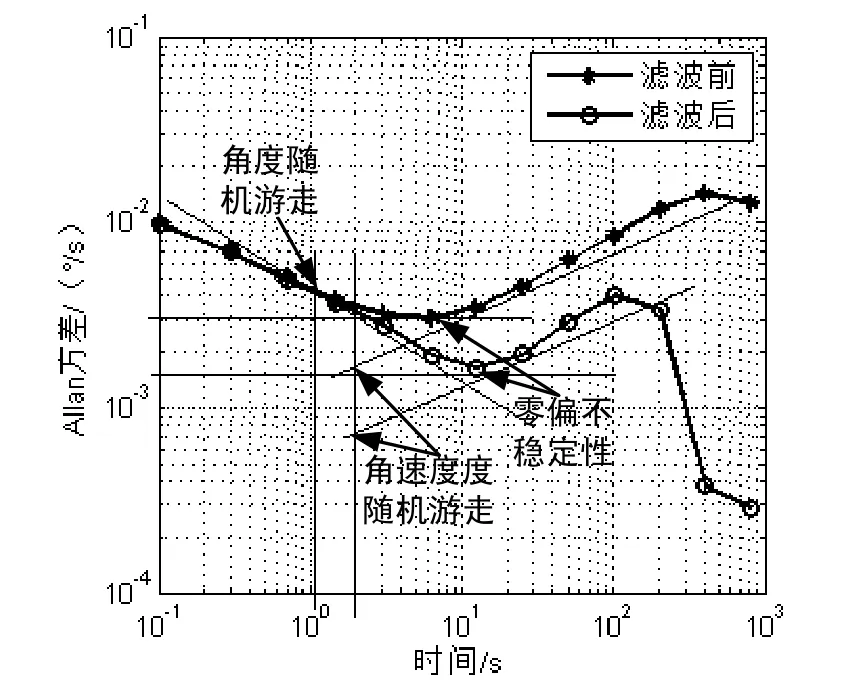
图12 动态模拟数值Allan方差双对数曲线Fig.12 Allan variance double logarithmic graph of dynamic data simulated
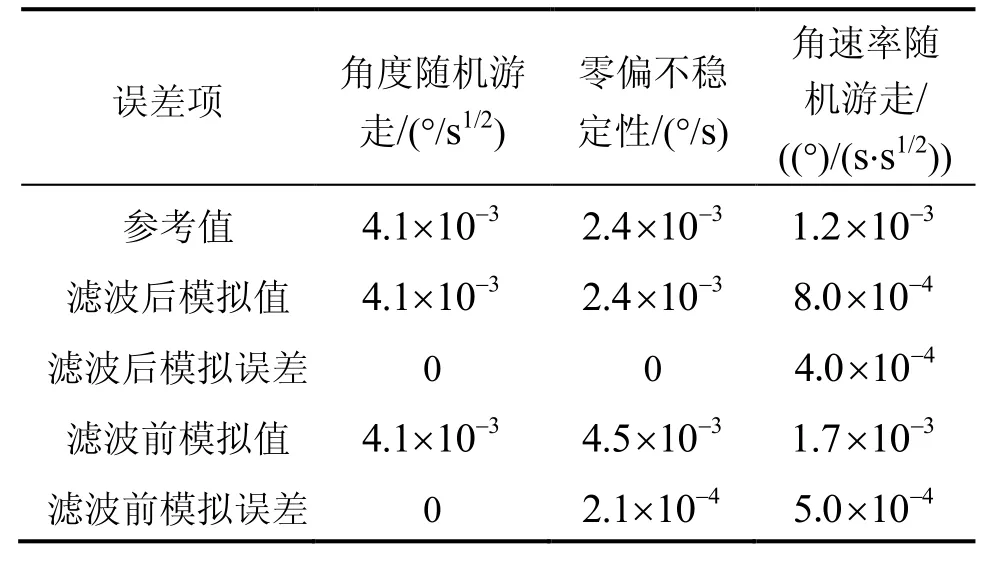
表2 动态误差统计表Tab.2 Error statistics for dynamic test
4 总 结
本文针对传统惯性元件模拟方法存在的误差较大、逼真度不足的问题,依据随机噪声频带分布特点,提出了基于带通滤波器的惯性元件随机噪声逼真模拟方法,并以Adis16480为模拟对象开展了数值模拟试验。相对于传统数值模拟方法,本文方法大幅提高了零偏不稳定性噪声的模拟精度,改善幅度达到50%,可实现零偏不稳定性噪声逼真模拟,具有很高的工程应用价值。
在惯性元件随机噪声模拟基础上,结合轨迹生成的惯性元件测量值,即可实现惯性元件数值模拟。另外,高动态、全温环境下惯性元件数值模拟需要再考虑g敏感性、温度引起的系统噪声,在此不再介绍。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
中成药(2018年7期)2018-08-04
快乐语文(2018年36期)2018-03-12
现代养生·下半月(2017年9期)2018-01-04
科技视界(2016年15期)2016-06-30
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
