
基于观测器的离散广义分段仿射系统H¥控制
2018-08-27 01:00周振华杨博媛
中国惯性技术学报 2018年3期
周振华,杨博媛,王 茂
(1. 常州轻工职业技术学院,常州 213164;2. 哈尔滨工业大学 空间控制与惯性技术研究中心,哈尔滨 150000)
一直以来,复杂控制系统鲁棒稳定性问题是广大 学者研究的热点和难点,其中关于具有范数有界时变参数不确定性广义分段仿射系统的鲁棒性能问题的研究少有报道。Barakat和Oliveira等人分别用混沌系统理论[1]以及线性可变参数Lyapunov函数法[2]对仿射系统进行研究,邱建彬等人首次讨论分段仿射系统线性矩阵不等式方法下闭环系统的稳定性问题[3],但基于观测器广义分段仿射系统鲁棒控制问题的研究确少有报道。在广义分段仿射系统当前所处的作用域未知,而且不能从测量输出获得的时候,我们希望通过引入基于观测器的控制器使得系统获得可测量的输出,并具有鲁棒稳定性[4]。基于观测器的控制器设计方法提出的目的在于使得由反馈控制器构成的闭环控制系统渐近稳定,而且要求系统输出可测量得到,且满足一定的鲁棒性能指标[5]。
快速发展的计算机技术也带动了现代控制理论研究方法的不断更新,广义系统鲁棒现代控制方法的研究也相继取得了一些成果,Najmeh和张俞等人分别对多模态分段仿射系统极限环综合控制[6]和脉冲仿射系统鲁棒稳定性[7]进行研究,所取得的研究成果大部分局限于连续时间系统,应用分段Lyapunov函数法[8]是常用的手段之一,并结合处理线性矩阵不等式的一些常用方法[9]。此外,分段仿射系统鲁棒稳定性研究多用于解决基于状态估计的滤波器设计方法问题[10],同时,带时滞环节仿射系统控制器设计方法的研究也取得了进一步的进展[11]。王茂等人针对范数有界离散分段仿射系统设计了基于静态输出的反馈控制器[12],并最终通过线性矩阵不等式(LMIs)的形式将主要结果体现出来。
本文引入广义系统理论,将不同具有范数有界时变参数不确定性的离散仿射系统看作子系统,采用基于观测器的广义分段系统控制器设计方法对其整体进行反馈镇定。因此,降低各子系统控制状态切换时产生时滞的可能性,在此基础上应用投影定理,不对系统矩阵进行分解,使得闭环系统保守性有所下降,并具有一定的鲁棒性能指标。
1 基本定义与引理
本文考虑的分段仿射系统具有范数有界参数不确定性,其具体的离散时间模型如式(1)所示:



如果式(2)和式(3)成立,则称此系统参数不确定性是容许的。


该多面体区域可以进一步描述为一个椭圆集合,其中:
对于每个椭圆区域,可以得到:

定义1[13]考虑离散时间广义分段仿射系统(1),其中
4)如果系统(1)是正则、因果,并且稳定的,则称广义系统(1)是容许的。
引理1[12]对于适当维数实矩阵若满足当且仅当存在某个标量于
引理2[14](投影定理) 给定矩阵则关于变量的矩阵不等式是LMI可解的,当且仅当以下三条同时成立:代表和的右正交核空间。
引理 3[14]的二次仿射函数,若对任意成立,则对于满足的所有
本文考虑如下基于观测器的控制器:

其中:

2 主要结果

定理1考虑离散时间广义分段仿射系统式(1),如果能找到对称矩阵





证明:首先,由离散时间广义分段仿射系统Lyapunov稳定性判据出发,基于闭环系统式(9)的状态空间描述,选取如下Lyapunov函数:




其中:

从式(16)可以得到:



很明显,式(20)的表述与条件式(11)相悖。即证明了矩阵束的因果性,进而证明矩阵束的正则性。
对于分段仿射系统融入仿射区域信息,即将式(7)带入式(16),基于引理3整理得到式(21),其中,

在应用Schur补引理的基础上,合并式(21)中所给的各个矩阵,进一步可以得到:

另一方面,由于本文所考虑的系统参数不确定性是范数有界形式的,将式(22)中的不确定性分离出来,将式(22)进一步改写为式(23)。
在此之前,我们做如下定义:


定理得证。
定理2针对参数不确定广义分段仿射系统式(1),如果能找到对称矩阵
i使得式(11)成立,且满足以下不等式:




证明:通过观察,上述不等式(25)中,闭环系统式(9)的 Lyapunov矩阵和系统矩阵相互耦合,接下来应用schur补引理进一步将其分开,从而降低闭环系统的保守性。首先将式(25)改写为如下形式:

通过观察,不等式(28)中Lyapuno矩阵和系统矩阵是耦合在一起的,接下来我们应用投影定理将其分离,并且不分解闭环系统的系统矩阵,进一步将式(28)改写为:

基于投影定理,做如下变量替换:
应用引理2的投影定理,得到:


将式(32)带到式(31)中,并结合所有给定矩阵的定义,最终得到:
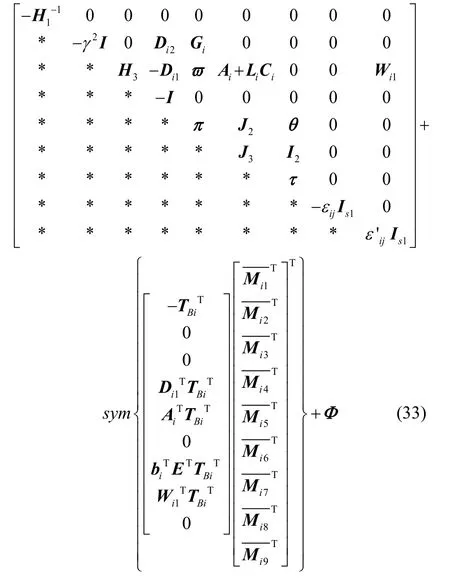
接下来再对式(33)应用投影定理,所用方法与前一次一样,此处证明省略。
注:欲寻求本文所考虑基于观测器的控制器使得闭环系统式(9)是容许的,首要条件则是系统式(1)的输入矩阵是列满秩的,在此基础上若能找到满足式(26)(27)的对称矩阵则线性矩阵不等式(9)的解存在。
3 数值仿真


图1 月球车运载体数学模型Fig.1 Mathematical model of the lunar vehicle carrier
其中,各物理量的具体含义如表1所示。

表1 各物理量的具体含义Tab.1 Specific meaning of each physical parameter

椭圆体系数矩阵通过以下公式可计算得到:


最终,基于此控制器设计的闭环系统不仅渐近稳定,同时具有一定的鲁棒性能,即:干扰抑制度
考虑系统全状态响应,对离散系统采样周期设置为1 s,给定如图2(a)所示控制输入曲线,根据本文定理所描述方法绘制闭环系统状态响应曲线如图2(b)所示。

图2 给定控制输入情况下闭环系统状态响应曲线Fig.2 State response curve of the closed-loop system under given control input
接下来,将本文所提控制器设计方法和文献[15]中所提算法进行对比,定义该月球运载车中广义矩阵此时系统降为正常系统,如式(35)所示:

表2 几种区间速度下的性能指标Tab.2 performance index at different speeds
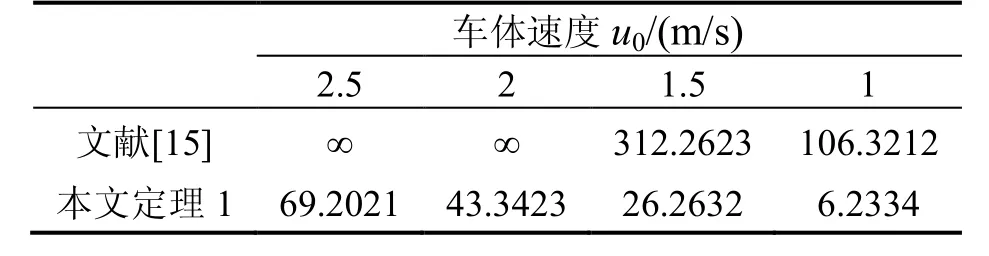
表2 几种区间速度下的性能指标Tab.2 performance index at different speeds
车体速度u0/(m/s)2.5 2 1.5 1文献[15]∞ ∞ 312.2623 106.3212本文定理1 69.2021 43.3423 26.2632 6.2334
接下来,针对系统矩阵分解与否对闭环控制系统造成的影响,将本文所提定理 1和文献[15]中所提算法中控制器设计方法进行对比。将系统矩阵参数重新赋值,整个过程保持其他系统参数不变,再次模拟仿真,具体取值如下:

仿真结果表明,基于文献[15]中所提算法中所提控制器设计方法构造的控制系统不能使闭环系统镇定,即找不到相应的基于观测器的控制器反馈增益以及观测器增益使得闭环系统(9)容许。而通过应用本文定理设计得到的闭环控制系统,能够得到反馈控制增益和观测器增益:

最终,通过应用本文定理1构造闭环控制器的算法,保证此类离散广义分段仿射系统不仅是渐近稳定的,而且同时满足一定的鲁棒。
针对如图1所示月球车运载体模型,我们只绘制月球车运载体角加速度以及角加速度在大地物理坐标系下X方向的角加速度分量所呈现的开环特性,如图3所示,与其对应控制系统的闭环控制曲线由图4给出。
从仿真所得数据可以看到本文所设计算法对运载体控制的最终效果比较明显,体现在角加速度上开环特性具有一定的系统跟随特性。同时,基于本文定理1的控制器设计方法由于没有对系统矩阵进行分解,使得闭环系统保守性有所保证,并且获得了较好的闭环系统鲁棒性能。

图3 数据对比开环系统状态响应曲线Fig.3 Data contrast on state responses of the open-loop system
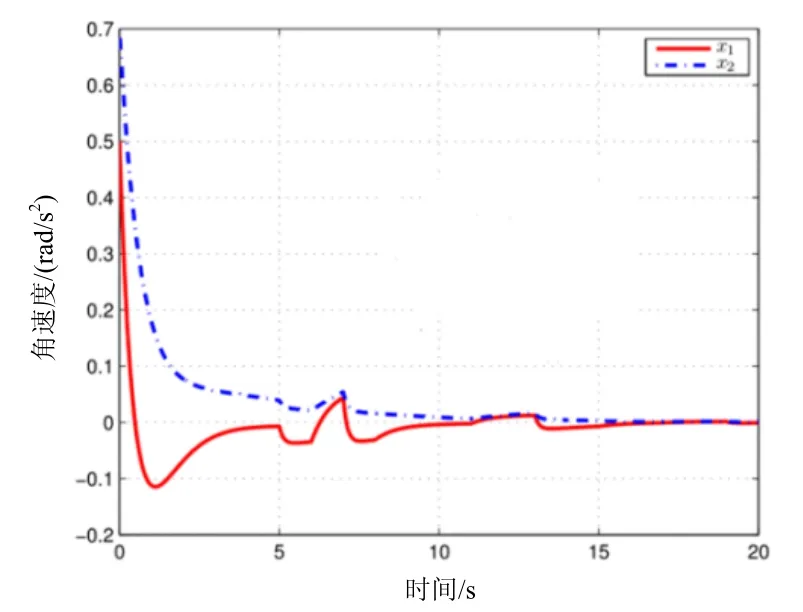
图4 数据对比状态响应曲线Fig.4 Data contrast on state responses
4 结 论
针对一类参数不确定离散分段仿射系统当前所处的作用域未知,而且不能从测量输出获得的问题,引入离散时间广义系统理论。为使闭环控制系统渐近稳定且具有一定的鲁棒性能,只需从离散时间分段仿射 Lyapunov判据出发,推导过程中结合投影定理,并应用几个处理线性矩阵不等式的基本引理将结果转化为线性矩阵不等式的形式。设计了使此类闭环系统容许的基于观测器的馈控制器,且保证由此构成的闭环系统具有一定的鲁棒性能,在此基础上将控制器存在的充分条件以线性矩阵不等式约束的形式给出,为减低该算法的保守性,整个推导过程不对系统矩阵进行分解。最终,数值仿真以月球车运载体基体模型为例,给出了基于观测器的控制器的最优解,同时获得了控制器反馈增益和观测器增益,在此基础上保证干扰抑制度并使得闭环系统保守性有所下降。仿真表明,分析结论是正确的,理论上解决了此类参数不确定离散分段仿射系统当前所处的作用域未知且不能从测量输出获得的问题。
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
中国中医急症(2019年10期)2019-05-21
汉字汉语研究(2018年1期)2018-05-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
中国工程咨询(2017年10期)2017-01-31
