基于等效源法的单全息面分离声场研究
2018-08-30 14:38田湘林楼京俊
噪声与振动控制 2018年4期
田湘林,楼京俊
(1.海军工程大学 动力工程学院,武汉 430033;2.海军工程大学 科研部,武汉 430033)
近场声全息技术突破了瑞利判据,能达到较高的分辨率,能较为精确定位噪声源,自从提出以来受到了人们的广泛关注。但是该技术应用环境非常严格,要求必须为自由声场,这限制了近场声全息技术的广泛应用。
声场分离技术可以用来虚拟消声,从而达到近场声全息技术的应用要求,国内外很多学者开展了这方面的研究。根据声场分离的原理它可分为基于快速傅立叶变换法[1–3]、统计最优法[4–5]、边界元法[6]和等效源法等分离方法[7–9]。基于这些声场分离的原理形成了双全息面和单全息面测量分离声场的方法:基于声压测量的双全息面分离声场技术、基于质点振速测量的双全息面分离声场技术、基于声压-质点振速测量的单全息面分离声场技术。这些方法要求知道两个全息面上的声压或质点振速,或者同时知道单全息面上的声压和质点振速,采用这些方法时对声场分离效率较低,而且双全息面方法中两个全息面距离的选择没有通用的准则,只能通过经验选取,如果选取不恰当,会产生较大的分离误差。随后王冉[10]、宋玉来[11]、毛锦[9]等提出了只需知道单全息面声压的声场分离方法。文献[10]提出在已知单全息面声压的情况下采用等效源法重构一个虚拟全息面,然后利用统计最优的方法分离声场,文献[9]提出在已知单全息面声压的情况下利用测量时存在的误差采用等效源法直接分离声场。文献[9]和文献[10]提出的方法十分依赖于目标声源内部的等效源布置,其配置方法对声场分离的误差影响非常大,必须事先了解目标声源的大致位置和形状,需要一定的先验知识。文献[11]在测量过程中采用了重采样的方法,一次采样测量可以获得两个全息面的声压,然后采用球面波逼近的方法分离声场,这一方法也需要事先了解目标声源和噪声源的大致位置,需要一定的先验知识。
为了简化声场分离的步骤,在没有先验知识的情况下也能在较小的误差范围内分离声场,本文提出一种基于等效源单全息面声压分离声场的方法。该方法的基本原理是:首先采用重采样的方法经过一次测量得到两个全息面的声压数据,然后按照等效源的方法分离声场。
1 等效源近场声全息
等效源近场声全息是在声源内部靠近表面的地方布置一定数量的等效源来替代实际声源。这一系列的等效源Q在全息面上产生的声压与声源在全息面上产生的声压相等。各等效源的源强通过等效源点和全息面测点的传递矩阵与全息面复声压计算获得。设全息面测点数为N,等效源数为M,其基本的公式为

式中表示ph为全息面复声压列向量,为N行列向量,Gh为各等效源点与全息面测点的传递矩阵,为N×M维矩阵,Q为等效源列向量,为M行列向量。
计算式(1)得


此时的Q为最小二乘解。当M<N时,有

此时的Q为最小二范数解。式(3)和式(4)中的正则化参数λ可以采用最优近场声全息的方法[12]来确定。
2 基于等效源分离声场的原理
全息面位于目标声源的近场,重构目标声源面和噪声源面与全息面的关系如图1所示。
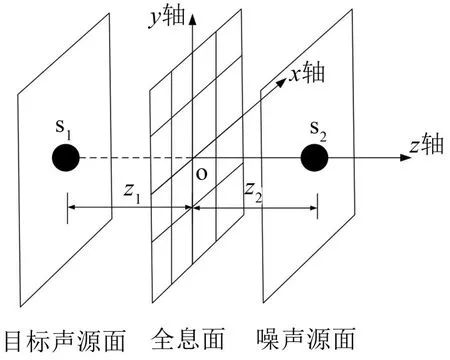
图1 全息面位置示意图
如图2所示,将M个全息面测点按列从上到下进行编号,并且逐渐向右进行,然后将编号中所有奇数的测点编为一组,所有偶数的测点编为一组,图中的三角形和圆形分别表示测点S1组和测点S2组。
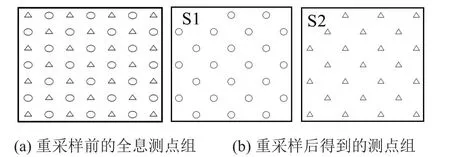
图2 全息测量面上的测点空间重采样示意图
其声压记为pS1和pS2,目标声源面对pS1的声压贡献量为噪声源面对pS1的声压贡献量为目标声源面对pS2的声压贡献量为噪声源面对pS2的声压贡献量为由于声压是标量,并且可以线性叠加,有
联立式(5)至式(10),可得
上式中()†表示矩阵的广义逆,参照式(3)和式(4)的方法,求逆的过程必须使用正则化技术,正则化参数可以参照文献[1]的方法给出。

Q1、Q2分别为目标声源面和噪声源面上的等效源强。由于Q1、Q2分别为向量,向量中元素为0的地方表示该处没有声源或噪声源。
此方法具体计算的步骤如下:
第一步,确定目标声源面和噪声源面的位置,并且按照全息面上阵元的布放方式将目标声源面和噪声源面划分网格,每个网格交点处即为假想的点声源;
第二步,把全息面数据按重采样的方法分成两组数据;
第三步,分别求出各假想点声源到全息面的传递函数,并按照式(7)至式(13)的方法求出和Q1、Q2,即分离了声场。
此方法在计算的过程中并不需要事先知道目标声源和噪声源的大致位置,这一点比文献[11]中提出的方法要优越。
3 数值仿真
为了验证本方法的可行性,在MATLAB平台上进行了数值仿真。数值仿真的参数设置如下:在图1中所示的目标声源面和干扰声源面上各布置一个脉动点声源,脉动点声源的半径都取为0.001 m,脉动球表面的振动速度都取为0.25 m/s,振动频率f=200 Hz,在全息面中心点建立如图坐标系,图中目标声源S1的坐标为(0,0,-0.05),噪声源S2的坐标为(0,0.1,0.1),全息面为边长为1 m的矩形,按16×16的方式均匀布置传声器(根据采样原理,能满足最高频率为2 572 Hz的声波采样)。前一部分理论推导中没有引入误差,为了使仿真更接近实际情况,在仿真中加入30 dB的高斯白噪声。
为了定量研究声波的分离误差,定义声波分离的有关误差公式如下
式(14)表示声波分离后的误差,式(15)表示声波未分离的误差,psep表示分离后声波的声压,ph表示全息面处采集的声压,p表示目标声源在全息面处产生的理论声压值。
图3中比较了当分析频率为200 Hz时全息面声压分离前后的幅值和理论声压的幅值。

图3 全息面声压分离前后幅值以及理论声压幅值
从图中可以看出,声压分离前的幅值明显比声压分离后的幅值和理论声压的幅值大,并且声压分离后的幅值和理论声压的幅值相差不大。
图4展示的是分析频率为200 Hz时,直接测量所得的声压与理论声压相比的误差和声压分离后与理论声压相比的误差。
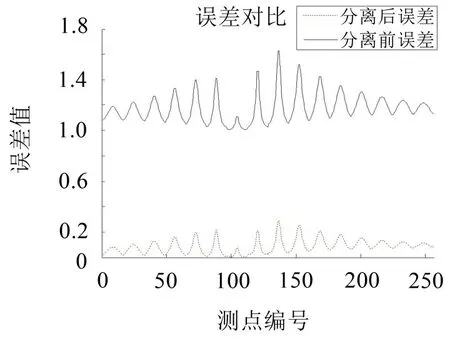
图4 声压分离前后误差比较
从图中可以看出,所有数据点上直接测量声压所产生的误差都比声压分离后的误差大,并且声压分离后的误差曲线和分离前的误差曲线形状相似,说明在声波分离前应该尽可能减小测量误差,这样才能使声压分离后的计算值更接近于理论值。
图5中表示的是分析频率为200 Hz时声波进行分离后计算声压幅值的误差曲线,大多数测点的计算误差都在15%以内,在96号测点处误差值仅为0.5%,最大误差值出现在143号测点处,误差值接近30%,此处正好为噪声源在全息面投影位置。在128号测点处出现了一个较小的误差峰值,此测点正好对应目标声源在全息面的投影位置。
从误差曲线可以大致看出目标声源和噪声源的位置,结合近场声全息的技术可以把目标声源及其作用的声场计算出来。
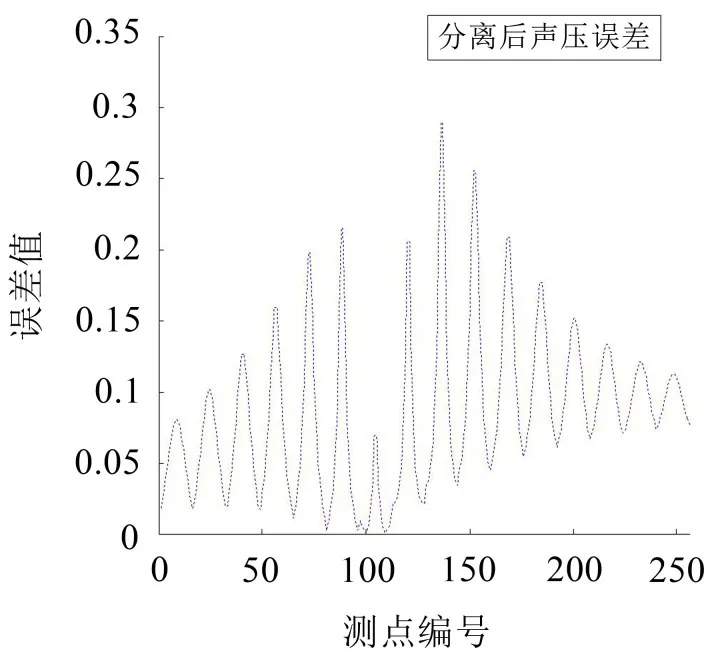
图5 分离后声压误差
图6表示的是在不同的分析频率下声压分离前后的平均误差曲线。
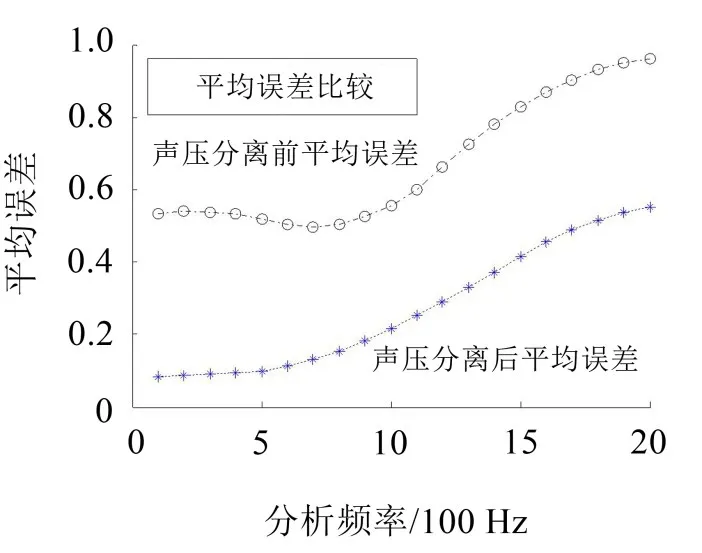
图6 声压分离误差随频率变化规律
从图6可以看出,在所有的分析频率下,声压分离后的平均误差小于声压分离前的平均误差,并且误差随着分析频率升高而增加,这是由于随着频率升高,声波的波长减小,半波长内测点的数目逐渐减小,此时全息面测点的声压不能正确表示声场。在1 500 Hz时,误差达到40%,如果采用此时的声压重建声源会产生较大误差,可以通过减小测点之间的距离来减小分离的误差。
4 结语
针对非自由声场提出一种新的虚拟消声的方法:基于等效源法的单全息面分离声场的方法,此方法在计算过程中并不需要事先知道目标声源和噪声源的大致位置。文中根据近场声全息中等效源法的原理对声场分离方法进行理论推导,数值仿真中采用脉动球作为目标声源和干扰声源,在中低频处,声压的分离误差控制在10%~40%之间,在高频处,声压的分离误差有所增大,可以通过减小测点距离来减小分离误差。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
电子世界(2022年1期)2022-07-23
压电与声光(2022年3期)2022-07-16
机械设计与制造(2022年4期)2022-04-28
汽车工程(2021年12期)2021-03-08
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
汽车工程(2018年12期)2019-01-29
家庭影院技术(2018年11期)2019-01-21
雷达与对抗(2015年3期)2015-12-09