
轨道检测综合试验标定台准确度试验研究
2018-08-31 07:01王琰
铁道建筑 2018年8期
王 琰
(1.中国铁道科学研究院基础设施检测研究所,北京 100081;2.中国铁路总公司铁路基础设施检测中心,北京 100081)
GJ-6型轨道检测系统[1-3]最高检测速度400 km/h,是我国具有自主知识产权的新一代动态轨道检测设备,用于检查轨道几何状态,评定线路动态质量,指导线路维修,实现轨道科学管理。确定轨道检测系统设备及传感器的标定精度和可靠性[4]是检测系统准确测量轨道几何参数的先决条件。中国铁道科学研究院基础设施检测研究所的轨道检测综合试验标定台[5]是目前国内最先进的轨道检测设备整系统试验与标定平台(如图1所示),可实现GJ-6型轨道检测系统的整系统工况仿真试验与参数溯源标定。综合试验标定台通过自动或人工控制可产生多种振动运动状态,用来模拟轨道检测设备在列车转向架或车体上相对于钢轨的姿态变化以及复杂的轨道不平顺工况,重现轨道线路的实际状态,并可使多种复杂运动得到分解,进一步明晰轨道检测梁和钢轨之间的运动关系。本研究采用与标准传感器比较的方法[6],基于中国计量科学研究院绝对校准的标准三轴加速度传感器测量综合试验标定台的振动情况,结合车辆与轨道的相对关系,从稳定度、失真度方面设计综合试验标定台垂向、横向振动试验,评定综合试验标定台振动频率、加速度、位移的准确度,为轨道检测系统的标定方法研究以及数学模型优化提供试验基础。

图1 轨道检测综合试验标定台
1 评判方法和指标
1.1 基本数学关系
试验基于经中国计量科学研究院绝对校准的标准加速度传感器来测量综合试验标定台的振动情况。加速度信号采集简单可靠,通常采用加速度信号积分得到速度和位移信号。硬件积分会导致信号精度下降,幅值和相位得不到保证,甚至会产生畸变,而软件频域积分算法复杂,运算量大,因此试验采用时域积分的方法[7]。由标准加速度传感器测量出的数据是加速度原始信号x(t),然后经过数值积分运算得到速度分量y(t),再次积分得到位移信号z(t),即

数值积分公式的阶数越高,积分所得结果的精度越高,一般选择三阶多项式进行加速度信号积分。对于单频信号,初始加速度为极大值时速度和位移幅值为0,由此可确定速度和位移幅值的初值。
1.2 稳定度
轨道检测综合试验标定台的计量特性随时间恒定的能力即为稳定度[8]。基于GJ-6型轨道检测系统的基本原理,结合车辆与轨道的运动关系,评定综合试验标定台稳定度的时长选取为10个振动周期。稳定度的计算方法[9]为

式中:S为稳定度;a0为综合试验标定台位移幅值设定值;Δamax为标准传感器位移幅值相对于综合试验标定台位移幅值设定值的最大偏差。
1.3 失真度
采用谐波分析法计算轨道检测综合试验标定台的振动波形失真度[8]。首先对标准传感器采集的信号进行快速傅里叶变换,得到各次谐波分量,然后计算波形失真度。波形失真度计算方法[9]为

式中:γ为总谐波失真度;Ai为第i次谐波分量幅值,一般采用5次谐波计算;n为谐波次数;A1为基波幅值。
失真度定义为各次谐波幅值平方和根与基波幅值的比值,因此式(4)中i求和是从2到n。
1.4 不确定度
基于对观测列统计分析的方法,采用A类不确定度评定时,通常采用贝塞尔公式计算试验标准差[10-11],即

式中:δ为试验标准差;xi为第i次观测列的数值;m为观测列的次数;为m次观测列的平均值。
当测量结果取m次观测列的平均值时,则A类标准不确定度为

当测量结果受l个其他量ui影响时,通常采用平方和根的方法进行不确定度合成,即合成不确定度
通常扩展不确定度U由合成不确定度u乘包含因子k得到,即

一般取k=2,置信概率约为95%。
相对扩展不确定度Urel为扩展不确定度U与被测量值最佳估计值e的比值,通常用百分数表示,即

2 试验设计及分析
轨道检测综合试验标定台的准确度在客观上会受到综合试验标定台设备状态、传感器标定、环境因素(如温度、大气压力)等的影响。本次试验研究严格按照规定[6]检查综合试验标定台设备的状态以及传感器的标定结果,试验前期分析设备状态运行正常,传感器标定结果良好。2017年8月在中国铁道科学研究院基础设施检测研究所设计综合试验标定台准确度研究试验,试验环境温度为25℃,相对湿度为40%,周围环境无强振动源、无腐蚀性气液体、无强电磁环境,最大程度降低环境因素带来的影响。
综合试验标定台安装GJ-6型轨道检测设备进行有载试验,完全模仿实际车辆与轨道之间的基础运动状态。将标准加速度传感器(中国计量科学研究院校准其不确定度为2%)紧固安装在综合试验标定台台面中心位置,启动综合试验标定台,人工控制综合试验标定台产生一定频率和幅值的正弦激励,通过标准加速度传感器与正弦激励进行比较并通过数据计算获得综合试验标定台实际工作参数。
基于GJ-6型轨道检测系统的基本原理,结合车辆与轨道的运动关系,试验设置综合试验标定台频率为1 Hz,位移幅值12.5 mm,进行垂向正弦往复运动。标准传感器采样频率为20 Hz,待系统预热稳定后,选取综合试验标定台10个周期的数据(200个采样点),加速度采集数据如图2所示。根据标准传感器采样频率计算综合试验标定台的振动频率,10个周期内综合试验标定台振动频率稳定为1 Hz。采用式(1)及速度初值为0的条件计算三阶积分可获得速度信号数据,如图3所示。采用式(2)及位移初值为0的条件计算三阶积分可获得位移信号数据,如图4所示。
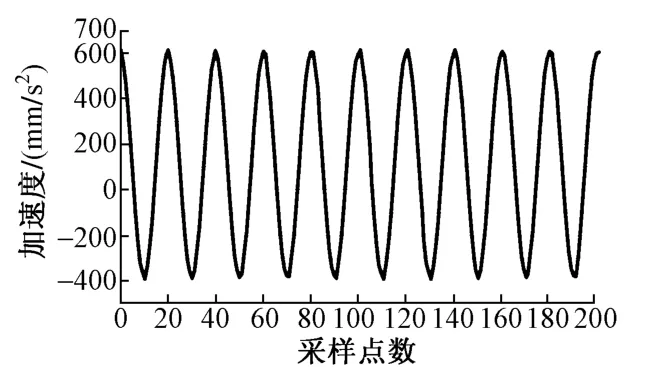
图2 加速度采集数据

图3 速度计算数据
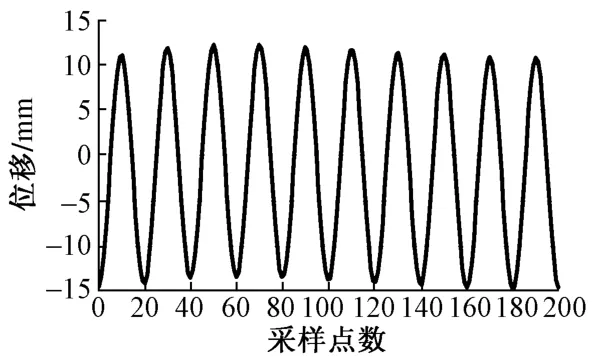
图4 位移计算数据
采用综合试验标定台10个周期振动位移幅值数据作为统计样本,选择10次位移幅值最大值计算其平均值作为综合试验标定台的实测振动位移幅值,位移幅值实测结果为12.83 mm,采用式(3)计算综合试验标定台10个周期的幅值稳定度为2.64%。
将获得的加速度、速度、位移数据分别进行FFT快速傅里叶变换,根据式(4)采用5次谐波分量计算加速度波形失真度为1.85%,速度波形失真度为0.32%,位移波形失真度为0.1%。
采用综合试验标定台10个周期振动位移幅值测量值作为统计样本。根据式(5)计算标准差为0.53 mm。根据式(6)计算不确定度为0.17 mm。试验标定台振动位移幅值不确定度计算需要考虑标准加速度传感器的不确定度,根据式(7)计算合成不确定度为0.17 mm,根据式(8)计算其扩展不确定度为0.34 mm(k=2),数据分析及处理见图5。根据式(9)计算其相对扩展不确定度为2.65%(k=2)。

图5 位移幅值不确定度数据分析及处理
基于GJ-6型轨道检测系统的基本原理,结合车辆与轨道的运动关系,设置综合试验标定台垂向振动频率 0.5,1.0,2.0 Hz,横向振动频率0.5,1.0,2.0 Hz,振动位移幅值均为12.5 mm。综合试验标定台垂向及横向振动准确度评定结果如表1所示。

表1 综合试验标定台准确度评定结果
综合试验标定台振动不确定度分析采用A类评定标准不确定度方法,通过对观测列进行统计分析评定,其标准不确定度用试验标准差表征。实际分析时,首先找出所有影响测量不确定度的影响量,由试验测量得到被测量的观测列,计算被测量估计值的标准不确定度,考虑各个影响量的标准不确定度分量,将它们合成得到合成标准不确定度,再确定被测量可能值分布的包含因子,最后得到扩展不确定度,根据计量规程JJF 1059系列标准的修约规则,综合试验标定台振动幅值相对扩展不确定度评定结果为3%(k=2)。
3 综合试验标定台应用分析
综合试验标定台可应用于GJ-6型轨道检测系统的高低标定。检测系统高低标定采用平衡标定法,在高低位移计标定完成后,将高低加速度计安装在综合试验标定台上,设置综合试验标定台垂向频率为1 Hz,位移幅值为12.5 mm,往复运动模拟实际工况,使通过高低加速度传感器得到的惯性位移与高低位移计的位移相等,高低位移计采用游标卡尺标定。待系统稳定后,随机选取约1 km的数据(3 999个数据点),GJ-6型轨道检测系统测量值作为统计样本,采用式(6)计算其不确定度。由于高低位移计采用游标卡尺进行标定,高低加速度计安装在综合试验标定台上,故还需要采用式(7),加上不确定度来源——游标卡尺的测量不确定度(中国计量科学研究院检定为0.011 5 mm)以及综合试验标定台的振动幅值不确定度,得到高低测量的合成不确定度,采用式(8)计算左高低扩展不确定度为0.88 mm。左高低不确定度数据分析及处理见图6。
从GJ-6型轨道检测系统高低标定应用可以看出,综合试验标定台振动幅值的准确度影响检测系统高低标定的精度。分析综合试验标定台振动的准确度及其误差来源,采用一定方法降低误差影响,可以提高轨道检测系统的标定精度以及优化检测系统数学模型。

图6 左高低不确定度数据分析及处理
4 结语
本试验研究采用与标准传感器比较的方法,结合GJ-6型轨道检测系统的基本原理及车辆-轨道的基础运动关系,从稳定度、失真度2个方面评定综合试验标定台垂向、横向振动的准确度。试验结果表明,综合试验标定台产生的振动数据准确度高,稳定性好,可为轨道检测系统的标定方法研究以及数学模型优化提供试验基础。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
当代水产(2022年6期)2022-06-29
振动与冲击(2022年10期)2022-05-30
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国惯性技术学报(2017年1期)2017-06-09
